 机械手触摸屏说明.docx
机械手触摸屏说明.docx
- 文档编号:29268349
- 上传时间:2023-07-21
- 格式:DOCX
- 页数:18
- 大小:475.49KB
机械手触摸屏说明.docx
《机械手触摸屏说明.docx》由会员分享,可在线阅读,更多相关《机械手触摸屏说明.docx(18页珍藏版)》请在冰豆网上搜索。
机械手触摸屏说明
机械手触摸屏使用说明书
一、连接说明:
1、将24V连接至触摸屏24V端子上,不要接错极性。
2、将随机带的232线连接到HMI—PLC上。
3、通电屏上PWR灯点亮,CPU灯低频闪,COM灯高频闪为正常。
4、屏幕先启动LOGO画面后进入系统等待界面,点击选择项进入。
屏幕若出现报警信息,可根据报警信息处理故障。
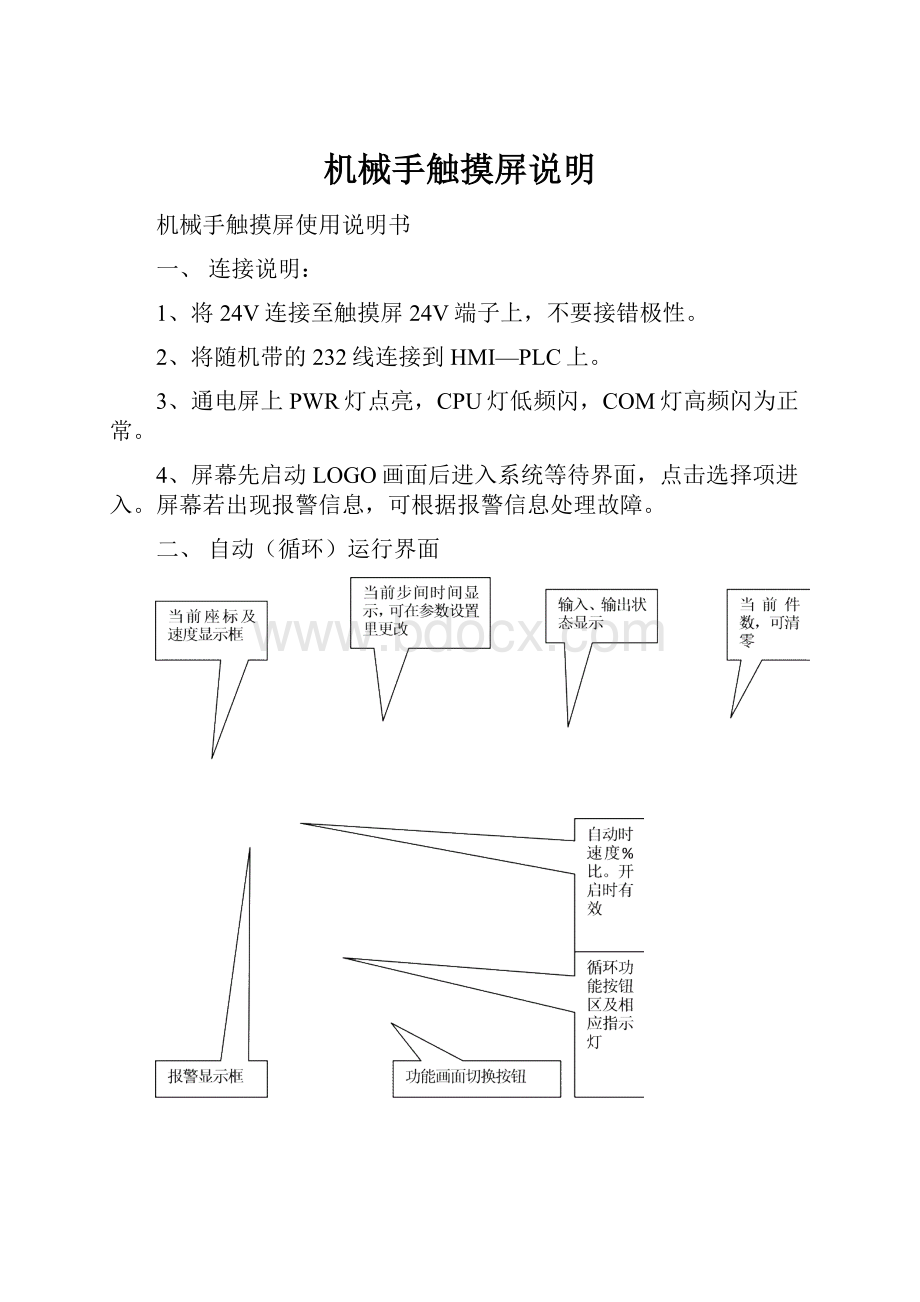
二、自动(循环)运行界面
1、循环运行时不能有红色报警,否则按“启动”键不工作。
2、进入手动界面,“伺服ON”上电,手动各轴离开零点位置,然后进入回零界面按X或Y键回零,启动回零前必须保存正确的零点坐标。
步进时间在参数设置界面里,不用延时为0。
3、运行参数:
X轴行程-500~500最高运行速度80000mm/min,Y轴-360度~360度最高30000度/min。
加减速No1:
500msNo2:
1000ms,其它值默认。
4、“暂停”键按下循环暂停等待,再按下“启动”键工作。
5、“单循环”键按下时,经过一次循环后停止,用于调试或工作结束回到起点。
单循环有周期显示,超过设定周期会报警。
6、“单段”键主要用于步进调试,再按下“单段“键恢复循环。
7、按循环设置键可转到各轴循环座标点及速度的设定。
8、停止时按“停止”键,若再按“启动”键就要从起始点运行。
停止时吸盘等会保持当前状态,如果需要复位点击“复位”键。
循环运行时进入手动界面各动作键操作无效。
三、手动操作界面
1、手动各轴。
在不回零时也可运行,但不会显示座标,回零后才能显示。
2、在参数设置界面可预置手动速度值,再经过手动倍率开关选择运行速度,指针是指示速度的倍率,有12种倍率选择。
3、手动动作状态键只有在循环停止后才有动作输出。
四、回零操作界面
1、每次上电都要回零来确定工作位置。
第一次回零前应将零位座标栏的数都置零,回零后当前座标显示栏XY值都应是0,然后手动移动各轴找到机械手的初始位置,将此时显示座标输入至零位座标栏并保存,再次回零后就是零点座标,也就确定了工作循环的初始位置。
若不回零系统会出现报警。
2、日常工作时,只要是上次停在初始位置且没有变动位置,就
可使用虚零设置键来回零省去每次回零。
由于回零点的重要性,按下虚零设置开关需要输入密码(888888),其它不用输,“设零开关”上方指示灯亮后,便可按其上方的X\Y按键设零,设零结束后要关闭“设零开关”。
3、如回零的过程中没有找到零点,此时机器有可能越程报警,需要手动回来,此时应检查回零减速开关是否正常或零位点与减速开关的位置是否太近,需要调整减速开关位置,直到正常为至。
回零中发现不正常,可按“停止”键停止移动,恢复正常后再回零。
五、调试界面
1、调试界面主要用MDI方式调试循环运行用的座标点是否准确,是一种便捷的调试功能。
可在MDI座标栏内输入轴座标、速度运行后来确定各轴的位置、速度是否符合机械手每个运行点的要求。
2、示教方式的应用,举例:
如确定X轴的第一点(起始点),将预设座标值输入后MDI运行,完成定位若符合要求,可打开置点开关输入密码(888888)其上方的灯点亮后,按“XP1”按键,即可将当前X座标设为X第一点,在循环运行时就是X轴的起点和终点座标,以此类推设定其它点。
也可通过手动界面进行手动各轴后示教操作。
本程序预设了5个点,X轴有2个,起始点XP1和机床侧点XP2两点,Y轴3个点一个起始位YP1点,-90°点为YP2,180°点为YP3,以上程序再回到起始点XP1和YP1点,以后重复运行。
示教结束后要再次按”置点开关”关闭。
3、MDI运行速度输入后可通过手动调节运行速度比例,即按“+、-”按钮调至适当比例后,再按一次相应轴运行键X或Y,即可改变当前速度,如需停当前移动按”停止”键即可。
六、循环设置界面
1、“循环设置”界面是对循环运行参数的设定。
在启动循环运行前应先查询和设置页面的参数是否符合机械手的运行要求,确认后返回“循环运行”页面进行试运行。
2、循环参数设置有机械手运行的各点座标、速度和速度倍率,可直接在输入栏内输入,自动存储无需保存,掉电记忆。
最好不要在运行中更改座标值,以免出错造成机械越程和碰撞,速度大小可以直接更改,也可通过倍率开关选择,但需要开启倍率选择模式“%使用”键,最高倍率120%,最低倍率10%分12档,试运行后,将适当速度值写入速度输入栏,无需保存自动记忆。
也可在自动运行中自由调节运行速度的倍率,但“%使用”弹起后,运行速度会自动执行速度栏内的速度值。
七、参数设置1界面
参数设置用来设置机械手的运行参数,该界面有两个页面,首页的参数是公共参数设置,第二页面是特殊参数(PAM)设置需要输入密码(888888)才能进入(如图)。
1、公共参数包括手动速度、回零高低速度、回零方向(需输入密码)、各轴的+、-软限位值,循环运行时的各动作延时值、单周期报警值、需润滑时间报警值。
2、各速度参数值不能超过1.3节标明最高限制,还要注意在速度倍率是120%的增速值,输入完毕应按“保存”键保存。
3、回零方向在机床出厂时已调试完毕,不用再更改,确实需要更改必须慎重,输入密码(888888)只有0和8两个数值选择0:
为CW顺向、8:
为CCW逆向,不要输错,否则回零会出现异常,更改后需按“保存”键保存。
4、软限位值只有在回零后才起作用,应设置在行程允许范围内,软限位值需要保存。
5、步间动作时间值若不需延时,只要将相应值设为零。
在调试相应动作时,将所需时间值输入到相应参数内,延时单位为0.1S。
其中T1:
机械手在初始位置的下行时间值,T2吸盘1吸附所需时间,T3上行时间,T4在机床侧的下行时间,T5吸盘2时间,T6上行时间,T7下行时间,T8吸盘1时间,T9上行时间,动作重复仍执行上述时间。
6、单周期以“秒”为单位、润滑周期以“日”为单位。
超过设置时间系统会自动弹出黄色报警提示,对自动运行不干预,按“复位”键清除报警。
八、参数设置2界面
本界面只限用于机床出厂前的调试。
进入该界面需要初级密码(888888),用户使用中不必改动,若确需改动,一定要按照提示说明改动。
1、每转脉冲决定着与实际尺寸的符合性,与电子齿轮比和变比有关系,若不能确定电子齿轮比和变比请不要随意修改。
本系统X轴一转脉冲是10000个,螺距是20mm,一个脉冲当量是0.002mm,最高转速120000mm/min,实际设定80000mm/min;Y轴一转脉冲14400个,变速比为9:
1,一个脉冲当量是0.025°,最高转速149900°/min,实际设定30000°/min,使用时不要超过实际设定,否则电机将接近和超过最高转速,出现堵转或报警。
安川伺服驱动器电子齿轮比按
其它电机参考以上公式计算。
2、加减速设置:
如图左下栏中设置的是每个加减速号的时间,本系统实际可修改No1(默认0.5秒)和No2(1秒)号,No3(默认1.5秒)No4(2秒)不用修改,使用时在右中栏选择加减速号No1~No4。
3、加减速方式及脉冲方向选择:
加减速有梯形和S形两种方式供用户选择,同时可选择轴(CW/CCW)的方向。
S加减速曲线值在中下栏中设置,最大100(默认50)。
以上用户可根据需要选择。
4、脉冲的输出和基本单位设置:
本系统已选择PULS/DIR脉冲输出,单位X轴为mm,Y轴为°,用户可根据需要完成设置。
5、机器使用一段时间后,背隙变大已影响机器运行,可在反向间隙中设置,一般情况下不用设置。
6、在右下栏显示限制使用天数和实际使用天数,如需改动,请与机器制造商联系(用户说明书要去掉本条)。
7、机器制造商限制天数功能介绍(本条说明只对制造商使用,用户说明书中去掉本条):
原理是PAS1中PAS2中的密码相同时,不论天数到与不到均可自动解除循环运行限制功能,只要将PAS1中的密码通知用户更改便可。
PAS1和DD(限制天数)的值由厂商设置,输入密码为121123,输入后便可设置原密码和使用天数,输入密码时用户名不用输入。
用户密码PAS2修改时的密码为121121,输入时用户名不用输入。
若设置了密码和限制天数,当使用期限到时自动循环功能会失效,其它功能和设置正常。
如设置了90天,开机时间达到了90天时,会出现“系统内部错误请与供应商联系”的黄色报警,密码解除后,按复位键消除。
本系统当前默认密码都是0,用户限制不起作用,若使用此功能,厂商需设置PAS1和DD,密码为最多8位,天数为最高360天。
九、轴运行曲线显示画面
主要用来显示X、Y轴速度曲线,红色是X轴,黄色是Y轴。
作用:
通过运行曲线,判断各轴电机的加减速情况,根据需要修改加减速值,同时曲线也会得到优化。
九诊断界面:
主要用于维修、观察和判断输入输出点、部分内部继电器的工作情况来排除故障。
P00~P0F是输入信号的动作情况;P10~P1F是输出信号动作情况,具体用途见电气图纸。
M01~M4F是内部继电器工作情况:
地址
用途
故障原因
M01
使能接通
急停按钮应在松开位置
M03
PLC上电
急停按钮应在松开位置
M05
循环单段微分
主要来至屏单段键M50启动
M06
单循环开
单循环启动
M10
自动循环启动
与循环启动有关参数相关及回零有关
M18
单周期报警
运行输入信号不能到位或设定时间过长及相关参数
M19
计数器用微分
到最大计数1000000000时清零
M21
超时解除通
超出运行时间
M22
润滑报警
需要进行润滑,后按复位键清除
M23
超时报警
修改相关参数
M24
单周期计时
与单周期运行时间有关
M27
轴急停微分
与急停按钮有关
M3F
回零时接通
各轴没有回到零点检查一转脉冲及回零开减速关
M4D
未回零报警
各轴没有回到零点检查一转脉冲及回零开减速关
M4E
伺服未ON报警
伺服未上电
M4F
位控使用急停
功能使用
M100~M200F:
X轴位控I/O信息
地址
用途
故障原因
M100
X轴运行中
不运行察看轴参数和相关I/O情况
M101
轴有错误
复位,若不能解除重新上电,否则更换位控
M102
位控完成
到座标后点亮100ms
M103
不适用
M104
回零位亮
检查与回零有关参数、一转脉冲及回零开减速关
M105
不适用
M106
轴停止状态
M107
不适用
M108
软限位上限到
设置正确X+向参数
M109
软限位下限到
设置正确X-向参数
M10A
急停
轴处于急停状态
M10B
转动方向
亮是反向,不亮是正向
M10C
加速时
M10D
恒速时
M10E
减速时
M10F
不适用
M200~M200F:
Y轴位控I/O信息
地址
用途
故障原因
M200
Y轴运行中
不运行察看轴参数和相关I/O情况
M201
轴有错误
复位,若不能解除重新上电,否则更换位控
M202
位控完成
到座标后点亮100ms
M203
不适用
M204
回零位亮
检查与回零有关参数、一转脉冲及回零开减速关
M205
不适用
M206
轴停止状态
M207
不适用
M208
软限位上限到
设置正确Y+向参数
M209
软限位下限到
设置正确Y-向参数
M20A
急停
轴处于急停状态
M20B
转动方向
亮是反向,不亮是正向
M20C
加速时
M20D
恒速时
M20E
减速时
M20F
不适用
十一、报警信息:
1、红色报警会影响机器的正常工作,复位后仍不能解除必须查找故障原因。
2、黄色报警时提示报警,虽不影响机器运行,也要做相应处理,否则,长时间运行会影响到机器的寿命,但有的报警如单周期超时需检查机器相关输入信号。
3、相关的报警内容:
报警号
用途
故障原因
10
急停
急停按钮旋入
40
X轴+向硬限
检查硬限位开关及线路断开
42
X轴-向硬限
检查硬限位开关及线路断开
43
Y轴+向硬限
检查硬限位开关及线路断开
44
Y轴-向硬限
检查硬限位开关及线路断开
50
X+软限位
检查软限位设置及座标
51
X-软限位
检查软限位设置及座标
52
Y+软限位
检查软限位设置及座标
53
Y-软限位
检查软限位设置及座标
60
X轴驱动器未准备好
驱动故障
61
Y轴驱动器未准备好
驱动故障
62
X控制器错误
位控错误,复位仍不能解除重新上电
63
Y控制器错误
位控错误,复位仍不能解除重新上电
64
单周期过长
输入信号故障
65
需要对机床润滑!
!
!
润滑后复位或设置相关参数
70
伺服未ON
按钮未动作
71
未回零点
检查一转脉冲和减速开关
80
系统内部问题与供应商联系
复位,若不能解除重新上电,否则与生产厂商联系
十二、系统上电和运行顺序
1、上电顺序:
驱动在前,屏和PLC在后,或同时上电,若驱动器晚于PLC上电将产生驱动准备好报警,按复位即可。
2、工作顺序:
上电---设置相关参数(设置完可不用)---伺服ON---回零---手动设置运行座标、速度、软硬限位(设置完可不用)---进入循环界面---按启动键---调节适当速度。
3、关闭机器顺序:
自动运行状态下---进入循环界面---按单循环按钮---机器停止时---按停止键---关闭机器。
4、调试时注意事项:
4.1手动(或MDI)确定每个点的座标要精确细致;
4.2将各轴座标输入到循环设置点参数里,速度要输入一个低速值如X:
3000Y:
500;
4.3最好使用单段功能一步步的调试每个动作;
4.4有问题及时按停止键;
4.5完成步调试后要进行单个循环调试,逐步升高速度观察动作的平稳性或修改加减速时间(默认No10.5S)达到平稳要求;
4.6将调试好的速度值放入“循环设置”的速度值里;
4.7每次启动循环要有由低速到高速的平滑过程。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 机械手 触摸屏 说明
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《贝的故事》教案4.docx
《贝的故事》教案4.docx
-
《对韵歌》优秀教案8.docx
-
《函数yAsinωx+φ+P图象》wwwnet.docx
-
《静夜思》教学设计.docx
-
《汽车底盘构造与维修》题库与考核标准.docx
-
《世说新语》复习资料.docx
-
《我的服装我做主》教案设计.docx
-
《在品味情感中成长》教学片断设计.docx
-
11造价员《建设工程造价管理基础知识》精讲教程文件.docx
-
《不会叫的狗》教案 人教部编版1.docx
-
《操作系统》二学期A卷及答案.docx
-
《傅雷家书》名著阅读笔记.docx
-
《反不正当竞争法》下互联网平台封禁行为考辨以消费者用户合法权益保护为中心.docx
-
《化工原理》第六章蒸发.docx
-
《蓝海战略》概要11页.docx
-
《人生》读书心得.docx
-
《荷叶圆圆》公开课教案优秀教学设计26.docx
-
《科技出行研究报告》智能网联与新能源将变革未来汽车出行.docx
-
《272 向量的应用举例》导学案1.docx
-
《秋天》评课稿.docx
-
《电算化》第二章会计电算化的工作环境章节练习.docx
-
《室外给排水管道》施组.docx
-
《广东省建筑与装饰工程综合定额》计算规则.docx
-
《我多想去看看》教学.docx
-
《直通车车手基础认证》 考试答案 70题之欧阳育创编.docx
-
7天销量翻10倍皇冠卖家教您玩转最精准流量.docx
-
9 阿长和山海经.docx
-
《比例尺》教案.docx
-
《菜根谭》注译四闲适篇.docx
-
《福尔摩斯探案集》读后感15篇.docx
-
《红对勾》古代诗歌选择题答案补充.docx
-
《课堂密码》读后感及心得精选多篇.docx
-
电气监理细则.docx
-
沪教版化学九年级上册《化学研究些什么》中考真题.docx
-
电厂脱硫脱硝除尘一体化的创新之路.docx
-
电商自建物流与物流企业涉足电商的分析.docx
-
电大本科行政管理社会保障学期末考试习题附答案.docx
-
机房工程.docx
-
化妆品广告文案.docx
-
电子商务课件教你基础电子商务课程.docx
-
电控燃油喷射装置项目可行性研究报告.docx
-
基础设施市场化运作与BOT投融资模式在中国的变异适用及应注意的法律问题房地产1doc.docx
-
会计继续教育答案.docx
-
顶岗实习工作总结范文.docx
-
会计专业常见面试题.docx
-
混合创造价值的体育产业.docx
-
基于JAVA的小型超市管理系统.docx
-
国庆节英语祝福语大全100句.docx
-
地下水源热泵空调系统的设计.docx
-
霍尔果斯经济开发区兵团分区工业垃圾处理厂项目第四师.docx
-
第05课医药行业白云山分析0515知识.docx
