 基于STAP的机载雷达运动目标检测技术研究.docx
基于STAP的机载雷达运动目标检测技术研究.docx
- 文档编号:29159838
- 上传时间:2023-07-20
- 格式:DOCX
- 页数:24
- 大小:1MB
基于STAP的机载雷达运动目标检测技术研究.docx
《基于STAP的机载雷达运动目标检测技术研究.docx》由会员分享,可在线阅读,更多相关《基于STAP的机载雷达运动目标检测技术研究.docx(24页珍藏版)》请在冰豆网上搜索。
基于STAP的机载雷达运动目标检测技术研究
基于STAP的双基雷达运动目标检测技术研究
一、空时自适应处置
在机载雷达中,由于载机平台的运动,处于不同波束角度的反射体的回波包括不同的多普勒频移,杂波回波的多普勒频谱宽度决定于雷达平台速度、天线波束方向及宽度。
传统的杂波消除手腕将多普勒频率作为区分目标和杂波的唯一标准,并通过直接滤除多普勒频谱中杂波回波占据的频带而实现杂波消除。
而雷达运动引发的杂波频谱展宽,使得杂波可能与运动目标的频谱重叠,在滤除杂波的同时会将目标也滤除。
空时自适应处置(STAP)是超级有效的杂波消除和运动目标检测手腕。
STAP将杂波回波看做在方位角度(空间)和多普勒频率(时刻)平面上的二维散布的信号,它能按照杂波回波在空时平面的散布,自适应地调整二维空时滤波器响应,补偿平台运动引发的多普勒频谱展宽,最大限度地自适应杂波,并在空时平面内留下充沛的自由空间用于运动目标检测。
1、空时信号模型
空间维:
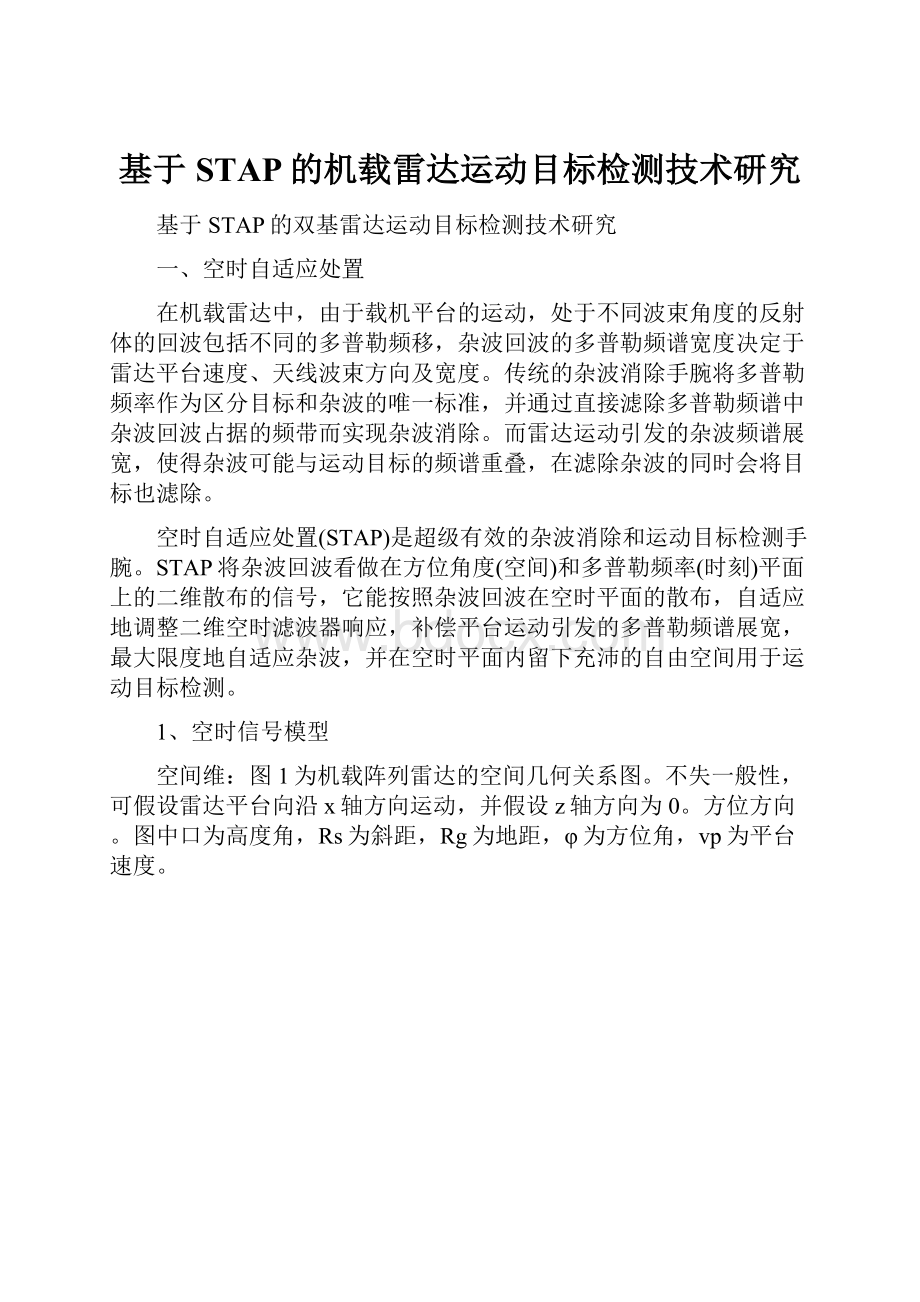
图1为机载阵列雷达的空间几何关系图。
不失一般性,可假设雷达平台向沿x轴方向运动,并假设z轴方向为0。
方位方向。
图中口为高度角,Rs为斜距,Rg为地距,φ为方位角,vp为平台速度。
图1机载阵列天线的几何关系
先忽略平台运动造成的影响,来考察相对于阵列中心O的坐标为xi、yi和zi的某一传感器。
该传感器接收到来自地面某一散射体的信号,它相对于阵列中心的相位移动为
(1)
其中N为阵列元素的个数。
接收信号通过解调和匹配滤波后应为
(2)
其中θ=arcsin(H/Rs),且Ar=squar(2Pr),Pr为接收功率,它与发射机功率、双程传播特性和散射体反射特性等雷达距离方程因子有关。
为了方便仿真,能够用下式来表示传感器方向图
(3)
(4)
其中,角度φ0和θ0表示传感器方向图的峰值方向。
对于前视阵列水平视角φ0=0。
,对于侧视阵列φ0=90。
。
而对于垂直方向的视角,可始终使φ0=0。
。
时刻维:
在脉冲多普勒雷达系统中,多普勒频率是通过观测发射机发射的相干脉冲串回波信号问相位不同而取得的。
若发射信号为
(5)
其中T是脉冲重复距离,M是发射脉冲串的个数,ωc是载波角频率,E(t)是发射波形的包络,R[·]表示求取包络。
T的倒数是脉冲重复频率fRF=1/T。
因此,运动目标回波的接收信号(通过解调和匹配滤波)为
(6)
vr为目标相对于雷达的径向速度。
若是E(t)表示的脉冲长度相对于T很短,则接收信号能够简化为
(7)
1.1杂波块回波信号
在图1的几何配置中,地面某一静止散射体在天线相位中心的接收信号为
(8)
对于位于xi、yi、zi处的阵列单元,由于已经假定雷达平台沿x轴方向运动,则
(9)
对于等间距阵列有
(10)
其中dx,dy,dz别离是阵列在x,y,z轴方向上的间距。
1.2运动目标的回波信号
对于径向速度vrod的运动目标,回波信号为
(11)
其中,目标径向速度vrod与目标-雷达间几何关系有关,还与目标速度和所处角度φi有关。
一般而言,该式还应包括目标速度切向分量所组成的二次相位项。
但如果是距离专门大且M很小,二次相位项能够忽略。
若是在观测时刻闻隔内目标方位角转变能够忽略,则目标速度vrod能够视为恒定不变的。
当脉冲系列比较短的时候,咱们能够如此近似。
而当脉冲系列比较长的时候,专门是在合成孔径雷达应用中,咱们必需考虑雷达和目标间的相对运动引发的雷达和目标间的几何关系的转变。
在这种情形下,在不同的脉冲距离内vr也是不断转变的。
用于计算改善因子和功率谱的空时信号导向矢量s具有和式(11)完全一样的形式。
在计算改善因子和功率谱时,往往假定处置器和期望信号完全匹配,如此能够取得最优杂波抑制性能的最佳测度。
因此,s既能够用作期望信号又能够用作空时匹配滤波器。
空时导向矢量s能够进一步分解为波束形成器b和多普勒滤波器d
(12)
“
”为Kronecker积。
分解后,视向为φL的波束形成器为
(13)
分解后的多普勒滤波器又能够称为速度滤波器,为
(14)
二、最优空时自适应处置器
最优空时自适应处置器即完全的自适应处置器,所谓完全(fully)是指在杂波抑制进程中,阵列单元数和回波脉冲数所决定的自由度被完全保留和利用;所谓自适应(adaptive)是指杂波抑制是基于实际接收的杂波数据的,即基于杂波协方差矩阵估量的。
自适应的杂波抑制技术能够补偿雷达系统的各类内在的系统误差。
最优空时自适应处置器的推导进程及结果和第二章一维的最优波束形成器和最优多普勒滤波器完全二样,都是基于最大化SNR而进行的。
最优空时自适应处置器为
(15)
S为导向矢量,即式(11),用于对所有可能的方位角度和多普勒频率进行搜索,能够将之表示为
(16)
它包括M个子矢量,每一个子矢量即是一个空间维导向矢量,即式(13)。
R为空时协方差矩阵,它是杂波、人为干扰和噪声协方差矩阵之和,即
(17)空时协方差矩阵具有块状Toeplitz结构
(18)
子矩阵Rm,m=1,…,M是M×N维空间协方差矩阵,Ro是同一时刻测得的空间协方差矩阵,R是相邻两个脉冲间的空间协方差矩阵。
空间信息包括在同一子矩阵之内,而时刻信息包括在不同的子矩阵之间。
最优空时自适应处置器的原理、结构如图2所示。
图中,N个天线在空间维对后向散射波场进行采样,每一个阵列通道都包括独立的放大器、复解调和AD转换等器件。
在每一通道内,利用移位寄放器存储时序回波采样,即取得空时自适应处置器的时刻维信息。
所有的空时数据先由空时协方差矩阵的逆进行杂波和干扰抑制,然后进入空时匹配滤波器。
空时匹配滤波器的系数是式(11)表示的参考信号的系数,多普勒滤波必需对所有可能的多普勒频率同时处置,即便用多普勒滤波器组,以在整个方位角度一多普勒平面内搜索运动目标。
图2最优空时自适应处置器
多普勒滤波器组的输出信号通过某一测试函数后,然后能够进行检测和显示。
一种常常利用的测试函数为
(19)
该测试函数被称为多普勒处置器,普遍地应用于实际系统中。
对于高斯噪声环境和形式肯定的目标信号,离散形式的似然比测试函数为
(20)
式中,Io为修整的Bessel函数,该式对白噪声和有色噪声都是接近最优的。
该处置器称为限制平均似然,μ影响多普勒通道数,通常能够选择1或2。
STAP处置器的有效性和性能能够用改善因子(improvementfactor,IF)来衡量。
改善因子是处置器输出端SNR和输入端SNR之比,即
(21)
空时自适应处置器的抑制杂波原理如图3所示。
为了抑制杂波,咱们能够采样三种滤波方式:
~维的时域滤波(多普勒滤波)、一维的空域滤波(波束形成)和空时二维滤波。
将方位一多普勒杂波谱在方位余弦轴和多普勒轴上投影后上下翻转,即别离是一维空域滤波器和时域滤波器。
对于图中的快速目标和慢速目标,其投影别离处于时域滤波器的通带和阻带,时域滤波器能够将快速目标从杂波中分离出来,而只能将慢速目标看成杂波滤除掉。
快速目标和慢速目标在空域滤波器中的投影都处于阻带,空域都无法从杂波中分离出来。
一维的空域滤波器和时域滤波器都具有很宽的阻带,对于图中慢速目标,都无法将之从杂波中分离出来。
空时二维滤波在整个方位一多普劝平面进行滤波,沿着杂波谱的对角脊线方向形成一个很窄的凹口.该凹口能够恰如其分地消除杂波,并将慢速目标保留在通带,而被检测出来。
图3空时杂波潍除原理
二、双基雷达
双基机载或星载雷达系统是当前雷达界研究的热点。
双基雷达相对于单基雷达具有很多长处。
双基雷达由于收发分置,能够利用目标或地域的非后向散射信息进行检测或成像,能够获取比单基雷达更为丰硕的信息。
双基雷达的发射性能够在远离战区在相对安全的区域工作,而接收机只接收信号,没有辐射,能够靠近战区或危险区域工作,故双基雷达系统能够隐蔽、安全的工作,接收机很难被敌方有效地干扰。
把无人机(UnmannedAerialVehicle,uAv)用作无源接收机,具有更高的安全性,是一种极具潜力的双基配置形式。
双基雷达上述长处的取得是以系统复杂性为代价的。
作为当前的研究热点,双基雷达系统有着很多亟待冲破的关键技术。
其中收发系统的同步、运动补偿和信号处置等问题最为突出。
STAP技术可用于双基雷达系统进行运动目标检测,但双基雷达杂波的空间特性和频率特性比单基雷达杂波复杂很多,使得杂波抑制更为困难。
一、双基雷达STAP最优处置器
机载双基雷达空间几何关系如图4所示。
接收机位于点R,相对于地平面的高度为HR,发射机位于点T,高度为HT。
接收机沿x轴飞行,速度为vR,发射机的飞行速度为vT。
某一发射脉冲通过发射斜距RsT,抵达地面一点P,该脉冲的反射脉冲通过接收斜距RsR。
抵达接收机。
如此,接收回波的多普勒频率为
(22)
式中,第一部份描述发射单程多普勒频率,第二部份描述接收单程多普勒频率。
以δR和δT为接收机和发射机的飞行方向。
在图2中咱们假设如δR=0。
若是vT=vR,δT=δR,θT=θR,φT=φR,则式(22)回归为单基情形时的多普勒频率。
用两倍PRF对多普勒频率进行归一化,取得的归一化多普勒频率为
(23)
多普勒频率或归一化多普勒频率可用来描述相邻脉冲间接收信号的相位不同。
与单基雷达STAP一样,咱们把双基雷达的相邻通道间的相位不同概念为归一化空间角度,或归一化空间频率,即
(24)
式中,d为通道间间距,λ为波长,αR为来波方向和接收天线轴线形成的锥角。
图4双基雷达空间几何关系
发射机发射M个相干脉冲,接收机在每一离散的距离门,对N个天线单元接收的每一个脉冲进行采样。
能够把这些空间、时刻和距离的采样系列看成M×N维的距离系列,并称之为数据快照(snapshots)。
每一M×N维快照对应着参数为
,
和R2w,(双程距离)的某一散射体(目标或杂波块),而且能够表示为MN×l维矢量
(25)
式中,βr是与雷达方程有关的因子,s(
,
)是MN×I维导向矢量
(26)
式中“
”表示Kronecker积,b(
)是N×1维空域导向矢量,d(
)是M×l维时域导向矢量,它们能够别离表不为
(27)
(28)
MN×l维的杂波快照xc(
,
)是以方位角φ为参数,对地面等距离环内杂波快照x(
,
)进行积分而取得的,即
(29)
由于βr(φ)是随机进程,故xc是随机矢量,且假定该随机进程是静态的。
具有最优杂波抑制能力的最优处置器加权能够用MN×l维矢量表示
(30)
式中,R=E{xx′}是杂波协方差矩阵Rc=E{xcxc′}和噪声协方差矩阵Rn=E{nn′}之和,且噪声在空域和时域都是白噪声。
在实际应用中,在每一距离R2w,都需要单独估量R。
对于第l个距离门,R的最大似然估量为
(31)
式中,Sl为临近快照数据集,k的范围选择为l-O.5(Nl-1)<k<l+O.5(Nl-1),Nl是数据集Sl空间大小,x(k)和R(k)别离是第k个距离门的快照和采样协方差矩阵。
当且仅当杂波脊独立于距离,
才是无偏估量。
式(30)最优处置器所得的改善因子为
(32)
在实际情形中,STAP处置器的性能受到估量误差及式(31)中R(k)对距离的依赖的影响,很难达到式(32)表示的最优性能。
二、双基雷达距离特性
在机载双基雷达中,目标的距离特性通常采用目标至收发天线相位中心的距离和来描述。
因为处在收发波束照射区域的任意两个(或多个)目标,只要它们各自到收发天线相位中心的距彦和相等,那么它们的回波信号都同时抵达双基雷达接收机。
如此,对于给定的收发相位中心,所有到收发相位中心距离和相等的点的集合,是一个以收发天线相位中心为核心的椭球面。
由于发射平台和接收平台通常处在不同的高度上,椭球的轴(即收发天线相位中心的连线)将不与地面平行。
假设平坦地面为零高度,发射平台高度为HT,接收平台高度为HR,以收发天线相位中心连线在地面的投影的中心0为原点,以投影线为X轴,在地平面按右手法则成立直角坐标系,如图5所示。
其中l为收发天线相位中心连线在地面投影线段的长度之半,R和T别离为接收和发射天线的相位中心,R′和T′别离为R和T在地面的投影,双基雷达等距离和曲线上的任意点为P(x,y,0)。
图5双基雷达等距离特性坐标系
通过几何求解,双基雷达的等距离和曲线的方程为
(33)
其中
(34)
(35)
(36)
图6双基雷达等距离和曲线
从内到外半距离和a依次为125Km,150Km,175Km,200Km
式中:
a为半焦直塑值,x0为偏移量,A,B别离为椭圆的长轴和短轴。
式(33)表明,双基雷达的等距离和曲线是一族椭圆,如图6所示。
图中的仿真参数:
l=100Km,HT=lOKm,HR=5Km,从内到外半距离和a依次为125Km,150Km,175Km,200Km。
由于收发载机高度相对于距离和值很小,偏移量x0很小,能够忽略不计,故椭圆族的核心近似为R′和T′。
3、双基雷达杂波特性
在单基雷达中,正侧视阵列的杂波多普勒频率与距离无关,这一特性对STAP的自适应实现超级有利。
下面研究利用正侧视阵列的双基雷达杂波特性。
在双基雷达系统中,由于发射机和接收机具有各自的裁机平台,发射机和接收性能够以不同配置形式进行工作,本节研究对齐飞行、平行飞行和垂直飞行等三种主要配置形式的双基雷达的杂波特性。
3、1发射机和接收机对齐飞行
接收机和发射机以相同的速度,相同的方向,前后对齐飞行。
图7为对齐飞行时的等多普勒曲线和波束迹线,其发射机在接收机前方2000m飞行。
咱们用粗线条双曲线表示接收天线的发射波束迹线(锥角相等的地面位置迹线),该波束迹线是关于x轴对称的。
发射波束迹线能够表示后向散射到接收机的杂波位置关系。
细线条双曲线表示发射接收双程等多普勒曲线。
图7等多普勒曲线和波束迹线(双基侧视)
显然,对齐飞行时的等多普勒曲线和波束迹线是关于飞行轴对称的。
咱们能够看到发射波束迹线和等多普勒曲线之问有一些相交。
而在单基正侧视雷达中波束迹线和等多普勒曲线之间是重合的。
如此,咱们能够得出结论:
发射机和接收机位置的错位,使得多普勒频率对距离有必然的依赖关系。
图8方位.多普勒轨迹(双基侧视)
0、*、x和+表示的半距离和别离为5Km、8Km、15Km和30Km
图8的方位-多普勒杂波轨迹曲线能够进一步揭露这种依赖关系。
该曲线是多普勒频率和角度方向cos(φ-δT)之间的曲线。
图中的半距离和为发射接收双程距离R2w的一半。
杂波回波相对于飞行轴的对称性也反映在图8中前瓣和后瓣的重合,即阵列天线的正面和背面接收的杂波回波多普勒特性是一样的。
多普勒频率对距离的依赖关系反映于图8中不同距离和的方位-多普勒曲线的位置关系。
在单基正侧视雷达中,不同距离的方位.多普勒曲线是重合的,而图8中再也不重合。
另外,咱们能够描画多普勒频率和cosα-cos(φ-δT+β)cosθ之间的曲线。
β表示阵列轴线的方向,现在β=0。
φ是主变量,θ是参数,方位-多普勒曲线随着θ的增加,即距离的减小而变短。
距离越大,方位-多普勒曲线越与单基情形接近。
自适应处置器形成一个二维的滤波器,该滤波器在沿着每一方位-多普勒轨迹形成凹口。
在图8中能够看到,不同距离和的方位-多普勒轨迹之间的错位,这使得凹口对应的多普勒频率往多普勒轴的负方向移动。
若是在图8中把发射机和接收机的位置互换,杂波凹口会往多普勒频率的正向移动。
3、2发射机和接收机平行飞行
图9为发射机和接收机平行飞行时的等多普勒曲线和波束迹线。
和前面一样,咱们用粗线条曲线表示地面上的发射波束迹线。
咱们能够看到发射机侧向的偏移使得多普勒频率再也不关于接收机飞行方向对称。
图中,发射波束迹线和等多普勒曲线有许多交点,即杂波多普勒频率是依赖于距离的。
图9等多普勒曲线和波束迹线(双基佣视)
这种特性一样反映于图10(a)中的杂波轨迹中。
对应于四种不同的,从发射机经由杂波,再到接收机的双程距离R2w。
,图10(a)给出了四条的杂波轨迹曲线。
杂波轨迹曲线间的错位,进一步揭露了杂波多普勒频率对距离的依赖关系。
而且,杂波轨迹的前瓣和后瓣再也不重合,这表明杂波多普勒频率不关于接收机飞行轴线对称,从图9中能够直观的看到这一点。
在实际情形中,后瓣一般是通过在阵列天线的背面安装金属反射器来进行抑制,以消除前瓣和后瓣的模糊。
因此,在实际处置的进程中后瓣对杂波谱不产生影响。
在特别的应用中,例如全向传感器要取得360度的覆盖,则要考虑后瓣对杂波谱的影响。
处置器要形成第二个杂波凹口,故需要更多的自由度。
(a)(b)
图10方位-多普勒轨迹(双基侧视)
O、*、x和+表示的半距离和别离为5Km、8Km、15Km和30Km
图10(b)和图10(a)的几何关系一样,只是发射机和接收机的高度变成8000m。
如此发射机和接收机间的偏置相对于载机高度和距离很小,所以这种配置的特性接近于单基正侧视情形。
咱们能够从图10(b)中看到,发射机和接收机间的水平偏置引发的影响不像图9和图10(a)~样显著。
在图9和图10(a)中,发射机和接收机问的水平偏置和高度在数值上很接近。
3、3发射机和接收机垂直飞行
图11为发射机和接收机飞行路径彼此垂直时的等多普勒曲线和波束迹线。
从可操作性的角度来看,这种配置是不受欢迎的,因为发射机和接收机的位置关系是随时刻转变的,多普勒频率特性也是随时甸转变的。
一旦发射机飞出了雷达距离作用范围,双基雷达系统无法正常工作。
可是,这种配置情形常常出此刻实际应用中,自适应STAP处置器应该能够工作于这种配置情形中。
图11等多普勒曲线和波束迹线(双基侧视)
在这种配置中,等多普勒曲线的形状变换专门大,它出现了大约45。
旋转。
在右上角,等多普勒曲线像双曲线,可是在左下像椭圆。
从图像能够明显看出,发射波束迹线和等多普勒曲线间有大量的相交点,多普勒频率对距离的依赖很强。
而且等多普勒曲线关于飞行轴极不对称。
图12方位一多普勒轨迹(双基侧视)
0、*、x和+表示的半距离和别离为5Km、8Km、15Kin和30Km
这些特性一样反映在图12中的方位-多普勒轨迹中。
图中,多普勒频率对距离的依赖很强,而且前瓣和后瓣的多普勒频率特性不同。
三、双基雷达杂波特性对STAP性能的影响
STAP雷达接收的数据能够视为空时二维阵列的快照系列,空时自适应处置需要计算一个对“快照”中每一元素的加权联合表达式。
计算最优加权通常要求获知快照的协方差矩阵之逆,通常,协方差矩阵是通过临近多个距离门的辅助数据而估量的。
对于单基侧视雷达系统,辅助数据和协方差矩阵是独立于距离的,即第k个距离门的协方差矩阵估量为
(37)
式中xm表示第m个临近的距离门的空时快照数据,该估量方式叫做直接平均处置(StraightAveragingProcessing,SAP)。
而对于双基雷达系统,辅助数据和协方差矩阵都不独立于距离,这即是杂波的非静态特性。
利用式(37)进行杂波协方差矩阵估量使得STAP处置性能大大降低。
图13是双基雷达杂波的非静态特性对STAP处置性能的影响的仿真结果,例中发射机和接收机垂直飞行,高度都为3Km,飞行速度都为90m/s,它们之间的距离为6Km。
仿真中利用到的其它参数为:
空间通道的个数为5,相干处置的脉冲个数为5,通道(传感器)间距为1.5cm,PRF为12KHz,雷达波长为3cm。
图13MVDR谱
为了构建某一距离的最优杂波抑制性能的自适应滤波器,咱们需要利用临近距离门的数据来估量杂波+噪声的协方差矩阵。
在STAP中,杂波特性能够用二维的功率密度谱(powerdensityspectral。
PSD)专门好地描述,二维PSD能够在空间和多普勒平面展现期望功率的散布。
对于除单基侧视之外的配置,这些PSD图中的杂波脊形状随距离转变而转变。
PSD对距离的依赖关系造成了咱们在估量协方差矩阵时的不便。
图13中前五个图为不同距离门的最小方差无偏响应(MVDR)谱,其距离和依次为10Km,llKm,12Km,14Km和16Km,该图为灰度图,白色表示功率高。
黑色表示功率低。
从中能够看出,对于不同的双基距离和(即不同的距离门),MVDR谱存在着专门大的不同,这些不同即是杂波非静态特性的表征。
图13中的最后一个图为应用式(37)进行杂波协方差矩阵估量取得的MVDR谱,与前5个图相较MVDR谱的宽度大大增加,这表明式(37)估量杂波协方差矩阵的方式没有考虑杂波的非静态特性,只是将不同距离门的数据进行平均操作,使得协方差矩阵失配。
图14为仿真取得的改善因子(IF)与多普勒频率之间的关系图,图中实线为最优处置的改善因子性能,带“*”的曲线为利用式(37)估量杂波协方差矩阵后而取得的改善因子性能。
从图中可知,利用式(37)估量杂波协方差矩阵,杂波的凹槽宽度大大增加,使得最小能够检测目标速度(MDV)增加,严峻恶化了STAP处置器的性能。
图14直接平均处置的IF性能
在机载双基雷达中,杂波多普勒频率是不独立于距离的。
STAP处置器若是通过临近距离门获取训练数据会使杂波凹槽加宽,杂波凹槽的加宽使得系统无法检测到慢速目标。
为此,必需采取办法来消除杂波多普勒频率对距离的依赖关系。
四、总结
机载雷达运动目标检测和成像技术在民用领域和军事领域都具有极为重要的意义。
基于STAP的多通道运动目标检测方式,较单通道运动目标检测手腕算法复杂、计算量庞大、本钱昂贵,但它能从本质上冲破单基检测手腕的局限性,因此性能优良很多。
以先进的相控阵天线技术和空时自适应处置理论为基础的运动目标检测技术,及其在双基雷达中的应用是当前研究的热点,是新一代机载预警雷达的核心技术,是新体制雷达的一个重要研究方向。
目前,世界各军事和科技强国在本领域都有着强烈的兴趣,投入了大量的人力、物力进行理论研究和工程实践。
STAP方式能够有效补偿平台运动引发的地面杂波多普勒频谱的展宽,改善地面慢速目标的检测性能,将STAP技术应用于双基雷达系统进行运动目标检测是一种理想的选择。
可是,不同距离门的双基地面杂波方位.多普勒频率特性不同专门大,即双基地面杂波具有非平稳特性。
而STAP技术本身是数据域实现的空时处置器,地面杂波的非平稳特性使得STAP处置进程中没有足够的训练数据支持,从而致使检测性能大大降低。
因此,必需采用有效手腕来减小或消除杂波非平稳特性,比如多普勒补偿和角度多普勒补偿等方式。
STAP技术在双基雷达系统中的应用是近几年出现的全新课题,需要冲破的问题还很多,在这一板块继续深切研究意义重大。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 基于 STAP 机载 雷达 运动 目标 检测 技术研究
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《彩云国物语》人物解析之红黎深转.docx
《彩云国物语》人物解析之红黎深转.docx
-
《大江保卫战》课堂呈现及教后反思.docx
-
《简单的轴对称图形第1课时》示范公开课教学设计北师大版七年级数学下册.docx
-
《建筑装饰构造》期末复习整理要点.docx
-
《傲慢与偏见》读书心得体会.docx
-
《投资分析》易错题练习.docx
-
《无机化学》自测练习题及答案.docx
-
《家春秋》读后感00字.docx
-
1合同草拟.docx
-
1至六年级古诗.docx
-
5藤野先生.docx
-
5以内加减法口算天天练强烈推荐125.docx
-
《陶渊明诗全集》全文古籍.docx
-
14年嵌入式软件试题.docx
-
12种瓜得豆电子教案六下册.docx
-
1B413060桥梁上部结构施工技术 小结.docx
-
《窗边的小豆豆》读后感450字.docx
-
100句永久珍藏的人生格言人生就像战场不是你死便是我活.docx
-
《建筑材料》教学总结.docx
-
150310 中国石化迈向绿色低碳新未来报道汇编宣传学习参考.docx
-
5S.docx
-
53高考英语新课标全国通用专题复习阅读补全七选五含最新两年高考一年模拟试题53.docx
-
《边城》省公开课一等奖课例赏鉴.docx
-
《网络营销》第三章教案搜索引擎营销的应用.docx
-
CMOS制作基本工艺解读.docx
-
11论文正文格式.docx
-
《嘉兴学院实验室开放实验项目总结报告》.docx
-
1试验室工作管理制度.docx
-
CENTOS44下的apache2+mysql5+php5+svn+memcache+ZendOptimizer+phpMyAdmin.docx
-
GE64排CT操作.docx
-
38妇女节慰问短信.docx
-
《滕王阁序》中的典故详释及成语.docx
-
维生素C的生产工艺.docx
-
暖通工程施工方案30061.docx
-
企业经营的本源共13页word资料.docx
-
五年制大专艺术设计平面设计人才培养方案改.docx
-
综合管理信息系统运行管理办法.docx
-
消防安全工作例会制度.docx
-
最新厂内机动车辆安全制度12.docx
-
人教版学年高一语文下学期第一次月考试题新版新人教版.docx
-
小学三年级上册语文《爬天都峰》课件三篇.docx
-
认知评估.docx
-
新人教版七年级上册英语单词表.docx
-
最新苏教版六年级上册小学科学实验报告单.docx
-
宜昌市七年级数学寒假作业套题含答案 4.docx
-
最新中国药科大学药剂学笔记及习题.docx
-
语文板块对练313.docx
-
做好职业生涯规划的关键要素有哪些.docx
-
注册结构工程师基础考试结构力学教程.docx
-
施工组织用电.docx
-
专项施工方案的范围.docx
