 840D培训教案.docx
840D培训教案.docx
- 文档编号:29128028
- 上传时间:2023-07-20
- 格式:DOCX
- 页数:58
- 大小:170.05KB
840D培训教案.docx
《840D培训教案.docx》由会员分享,可在线阅读,更多相关《840D培训教案.docx(58页珍藏版)》请在冰豆网上搜索。
840D培训教案
数控系统及编程
本章介绍的XHA2120×40型动梁龙门加工中心配置的SINUMERIK840D数控系统的编程基本概念及基本指令。
一、编程基本概念
1.坐标轴概述
(1)Z坐标轴。
在机床坐标系中,规定传递切削动力的主轴方向为Z坐标轴。
(2)X坐标轴。
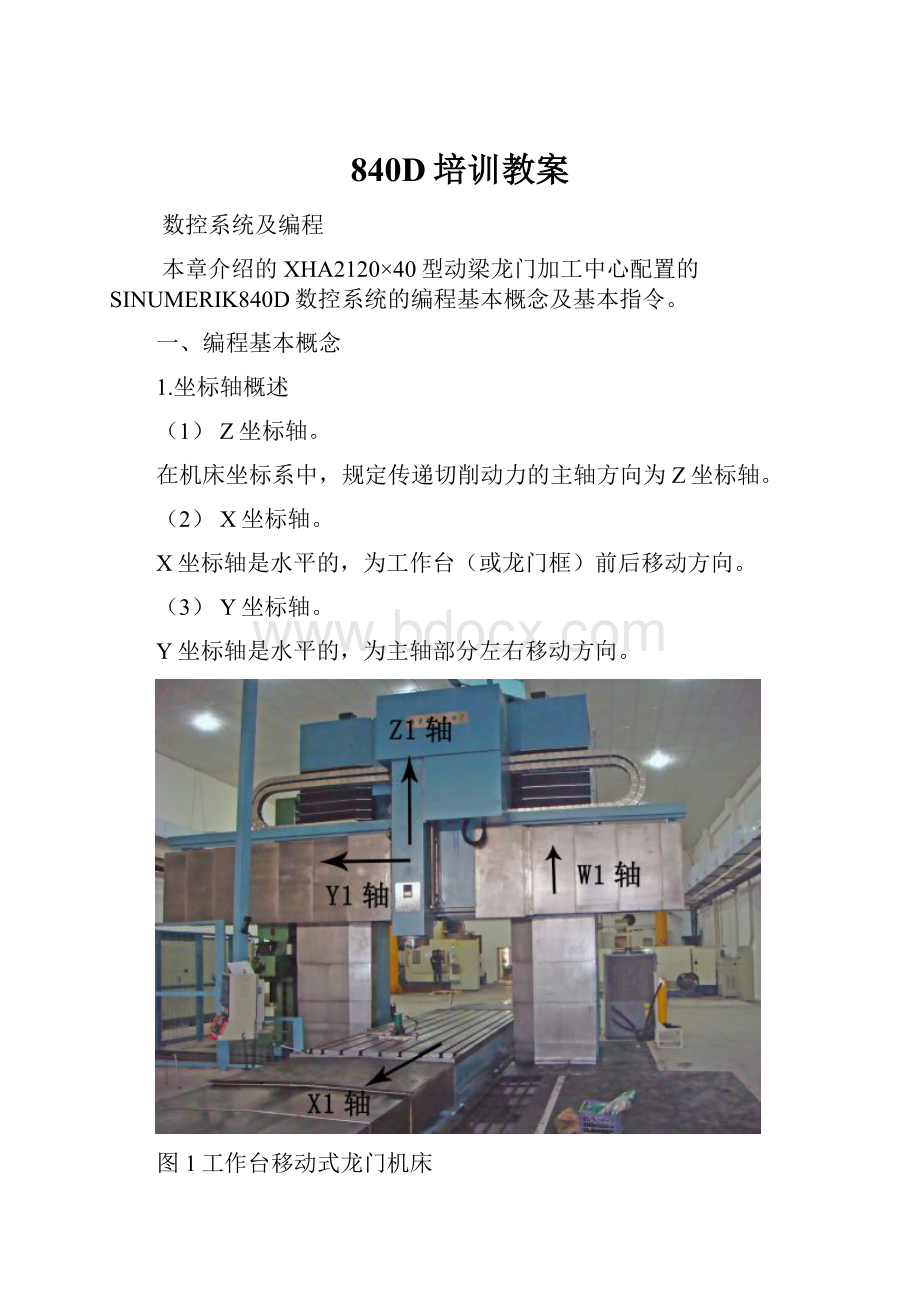
X坐标轴是水平的,为工作台(或龙门框)前后移动方向。
(3)Y坐标轴。
Y坐标轴是水平的,为主轴部分左右移动方向。
图1工作台移动式龙门机床
图2龙门移动式铣床
(4)主轴旋转方向:
图3中使用右手螺旋定则判断主轴方向。
(使用附件头时特别注意:
判断附件头转向)
图3右手螺旋法则
2.坐标系概述
数控加工需要精确控制机床主轴上刀具运动的位置,因此,各运动部件的运动方向必须在一个坐标系统内进行规定,为了简化编程的方法和保证程序的通用性,对数控机床的坐标和方向的命名制定了统一的标准。
1)机床坐标轴:
按照德国标准DIN66217的规定,对于机床应用右手螺旋定则、笛卡尔坐标系。
图3中大拇指的指向为X轴的正向。
食指的指向为Y轴的正向。
中指的指向为Z轴的正向。
基本直线轴:
X、Y、Z这三个轴为机床的基本直线轴。
图3右手定则
基本旋转轴:
A、B、C。
围绕X、Y、Z轴旋转的圆周坐标轴分别为A、B、C轴。
根据右手螺旋法则。
图4中大拇指指向为+X、+Y、+Z方向,其余四指的指向为圆周运动的旋转轴A、B、C轴的正方向
图4右手螺旋法则
附加直线轴:
如果在基本的直角坐标轴X、Y、Z轴之外,另有分别平行于它们的直线轴,则称为U、V、W附加坐标轴。
2)机床坐标系(MCS):
机床坐标系是用来确定工件坐标系的基本坐标系。
机床坐标系的原点也称为机床原点或机床零点。
这个原点的位置在机床出厂前已经由机床制造厂家进行了设定,它是一个固定的点。
为了正确地建立机床坐标系,通常在每个坐标轴的运动范围内设立一个机床参考点。
机床参考点与机床原点的相对位置由机床参数设定。
因此,机床开机后必须先进行回机床参考点的操作。
机床回参考点后,才能;1,激活(建立)机床坐标系。
2,螺距补偿数据生效。
3,各坐标行程软限位生效。
3)工件坐标系(WCS):
工件坐标系实际上是机床坐标系中的一个局部坐标系,在编制加工程序时,用于描述刀具运动的位置。
工件坐标系的原点称为工件原点。
它的位置由编程人员确定。
通常工件原点设定在工件上某一特定的点,需要注意的是,工件坐标系的各坐标轴必须平行于机床坐标系中的相应坐标轴。
图5工件坐标系
好处:
以工件坐标系为基础编写的程序,可以在不同的机床上运行、也可以在同一台机床上反复应用。
3.刀具运动原则坐标轴正方向判定原则
由于机床的类型不同,有的是刀具在运动,有的是工作台运动而刀具不运动。
然而,在NC编程时,我们总是认为工件是不动的,只是刀具在运动。
这样做的好处在于操作者可以不必区分各坐标轴的实际运动部件,NC程序可以在不同的机床上运行。
图6
4.坐标平面的规定
G17:
X—Y平面,X为第一轴、Y为第二轴、Z为进刀方向。
G18:
Z—X平面,Z为第一轴、X为第二轴、Y为进刀方向。
G19:
Y—Z平面,Y为第一轴、Z为第二轴、X为进刀方向。
图7
G17、G18、G19平面的确定
图8
当使用极坐标、钻圆周孔、钻直线上孔等等与第一轴有关。
图9
图10
5.极坐标
极坐标是两维坐标,它只在所选的平面内起作用。
利用点在直角坐标系上的投影值来规定点的位置的坐标系称为笛卡尔。
然而当工件的某一部分用半径和角度来测量时,用极坐标描述点的位置则更为方便。
测量的起始点称为极点。
图11
例如:
P1和P2点的位置可以用以下的极坐标来描述
P1:
半径为100mm,角度为30°。
P2:
半径为60mm,角度为75°。
6.绝对坐标与相对坐标
绝对坐标是指所有坐标的位置都是相对于某一固定坐标原点来计量。
绝对坐标描述的是刀具运动的位置,如图12所示
图12
例如:
P1、P2、P3点坐标
P1:
X20Y35
P2:
X50Y60
P3:
X70Y20
相对坐标是指坐标系中的每一个点位置都是相对于前一个点的位置而计量的,又称为增量坐标。
相对坐标描述的是刀具运动的距离,如图13所示。
图13
例如:
P1为相对于原点的位置X20Y35
P2为相对于P1点的位置X30Y25
P3为相对于P2点的位置X20Y-40
二、数控编程基础
1.编程语言的元素
在编写程序时,可以使用大、小写的26个英文字母和数字0~9,采用大写与小写字母没有区别。
特殊字符:
()括起参数或说明;例SIN(30)
CYCLE81(100,0,5,-30)
[]括起地址或索引;例$TC_DP3[1,1]=150
<小于例IFR1<20GOTOAA
>大于例IFR1>10GOTOBB
:
主程序段,标记名结束;例;:
10、AA:
=赋值,等于例;R1=10、X=100×COS(30)
/程序跳步,除例;/N10G00X100、X=50/2
*乘
+加
-减例;X=1000*2+50-2.5
“字符串标识符例;MSG(“ZUANTOU”)
_下划线,属于字母
;注释开始例;N10T1;ZHONGXINZUAN
;N20X100分号后程序不执行。
LF程序段结束符
空格分隔符(空白)
2.程序结构与调用
NC程序也被称为零件程序。
因为它包含了加工一个零件的指令。
按程序结构划分,可分为主程序和子程序。
子程序与主程序在原则上没有区别。
(1)程序名程序名由文件名产生。
一个程序名可以由最多16个字符组成,包括字母、数字和下划线,并且不能包含任何分隔符。
但是,前两个字符必须是字母。
例如,MPF100、ABCD、AAAA。
除此以外,子程序还可以用地址字L,其后最多跟随7位正整数来命名。
例如,L7、L0123。
需要注意的是,地址符L之后的每一个“0”均有意义,例如,L7与L07是两个不同的子程序。
(2)程序结束符主程序可以使用M02或M30
子程序可以使用M17或RET
M02、M30、M17、RET必须写在程序中的最后一个程序段。
使用RET指令结束子程序时,不会中断程序的连续运行。
(3)子程序的调用在单独的程序段内写入所需调用的子程序名即可,如图14
图14
如果需要连续多次调用同一个子程序,可以在调用子程序的程序段中加入表示调用次数的参数P,调用次数最多可达9999次。
例如:
N10MPF100;调用子程序MPF100
N20L07P3;连续调用子程序L07三次
子程序不仅可以被主程序调用,而且还可以被其他子程序调用,这个过程称为子程序嵌套。
子程序嵌套的深度可以达到8层。
例如:
XIKONG(主程序)
G00G54G90Z100
X0Y0
M3S1000F500
Z3
G01Z0
XKP5
G00Z100
M5
M02
XK(子程序)
G91G01Z=IC(-2)
G90X15
G02I-15
G01X0
M17
图15
3.程序段与程序段结构
NC加工程序由多个单独的程序段组成,每个程序段都是一个基本的操作步骤。
如图16所示,每个程序段通常由若干个“字”组成。
图16
NC语言中的字由一个地址符(通常为一个字母)和一个或多个实数数值组成,该数值如果为正数,其正号可以省略。
地址是变量标识符或者某些固定的标识符,用于表示坐标轴(X、Y、Z…),主轴速度(S),进给速度(F),圆弧半径(CR)等。
一个程序段应包括实现某一操作步骤的全部所需数据,并以换行符“LF”结束。
换行符“LF”不必手动插入,当按下回车键换行时,会自动生成。
程序段又可以分为主程序段和子程序段。
主程序段号由字符“:
”和一个正整数(程序段号)组成。
程序段号永远在程序段的开头出现。
在检索时,主程序段号在实现某一任务的程序中必须是唯一的。
例如:
:
10F200S900M3
子程序段号由字符“N”和一个正整数(程序段号)组成。
程序段号总是出现在程序段的开头。
在检索时,子程序段号在实现某一任务的程序中必须是唯一的。
例如:
N20G1X14Y35
程序段号的排列顺序是任意的,但是,最好采用依次递增的方式。
也可以编写不带程序号的NC加工程序。
一个NC程序通常由一个主程序段和几个子程序段组成。
例如:
:
10F200S900M3
N20G1X14Y35
N30X20Y40
N40Y-10
4.程序跳段
在加工程序中,不希望被执行的程序段可以跳过,只要在希望跳过的程序段的第一个字符前插入跳段识别符“/”。
如果该程序段有程序段号,识别符“/”要添加在程序段号之前。
在程序执行过程中,插入识别符“/”的程序段中的指令便不会被执行,转而继续执行下面不带跳段识别符的程序段。
例如:
N10…执行
/N20…跳过
N30…执行
程序跳段功能是否生效,需要由用户自己通过“程序控制”中的功能选项预先进行设置。
5.程序跳转
为了控制程序的执行过程,可以借助有条件的程序跳步来实现程序分支。
程序转向的目标可以通过跳转标记来指定。
标记名必须由2~8个字符组成,其中可以包括字母、数字和下划线,但前2个字符必须是字母或下划线。
标记名后面要紧跟着冒号“:
”。
在一个程序中,标记名必须是唯一的。
标记名总是写在程序段的开头,如果程序段有一个程序段号,则将标记名写在程序段号之后。
例如:
N10……
SAM1:
G01X0Y0
……
N60SAM2:
G00Z100
……
……
N100……
(1)绝对跳转绝对跳转指令必须单独写在一个程序段中,程序执行到此即无条件转向其指定的程序段。
GOTOF向前跳转(向程序结束方向跳转)
GOTOB向后跳转(向程序开始方向跳转)
例如:
当使用平面铣刀铣削平面时,每个零件的余量不一致。
铣削余量小的零件时,可以使用GOTOF语句跳过前面几步。
使用Φ200铣刀加工900×2000平面
;XPM
N05G00G17G54G90Z200
N10X-110Y90
N15M3S150F500
/N20GOTOFAAA
N25Z4
N30G01X2000
N35Y270
N40X0
N45Y450
N50X2000
N55Y630
N60X0
N65Y810
N70X2000
N75G00Z100
N80X-110Y90
AAA:
Z0
N85G01X2000
N90Y270
N95X0
N100Y450
N105X2000
N110Y630
N115X0
N120Y810
N125X2000
N130G00Z100M05
N135M02
图17
利用无限循环,使用Φ200铣刀加工900×2000平面
XPM1
N05G00G17G54G90Z200
N10X-110Y90
N15M3S150F500
N20Z4
N25AAA:
G01X2000
N30Y=IC(180)
N35X0
N40Y=IC(180)
N45GOTOBAAA
N50M02
图18
(2)条件转向
条件语句形式为:
“IF条件表达式GOTOB/GOTOF跳转标记名”。
当条件满足,程序将会跳转到指定的目标。
条件表达式所用的条件运算符包括:
==(等于)、<>(不等于)、>(大于)、>=(大于等于)、<(小于)、<=(小于等于)、AND与、OR或、NOT非、XOR异或。
例如:
使用变量编程加工抛物线Y=0.5X
图19
;PWX
R1=10
G00G54G90Z100
X10Y50
M3S1000F200
Z0
AA:
R1=R1-0.1
G01X=R1Y=POT(R1)/2
IFR1>-10GOTOBAA
G00Z100M5
M02
6.程序注释
为增加程序的可读性,建议在程序中加入含义清晰的说明部分,便于其他用户和编程人员了解NC程序的内容。
注释通常加在程序段的末尾,并用西文字符的分号“;”将注释与NC程序分隔开。
注释内容在中文环境下可以使用中文字符。
例如:
N30T1M06;T1直径250mm面铣刀
程序运行时,当前程序段中的内容也会一并显示在屏幕上。
7.程编预置信息
在编制加工程序过程中,可以在一个单独的程序段内写入预先编号的信息文本,以便在程序执行到该程序段时,将此预定的信息显示在机床屏幕上的特定的区域。
例如:
N10MSG(“粗加工外轮廓”)显示信息
N20X…Y…
N…
N90MSG()清除屏幕显示信息
8.运算/算术功能
+加-减
*乘/除
SIN()正弦
ASIN()反正弦
COS()余弦
TAN()正切
ATAN()反正切
SQRT()平方根
POT()平方
ABS()绝对值
TRUNC()舍位到整数
ROUND()舍入到整数
9.编程规则
①自保持功能
模态指令:
在本程序中一直有效,直到被取代或取消
非模态指令:
只在本程序段中有效
为了使编程和输入尽可能简单,大多数G代码和M代码都具有自保持功能(即模态码、续效码),除非是被取代或取消,否则总有效的。
另外,X、Y、Z、F、S的内容不变,下一程序段会自动接受该内容,因此也可不编写和不输入。
例N40G00X30Z5S700
N50G00X0Z5S700
N60G01X0Z0F100S700
N70X25Z0F100S700
以上程序可间写为:
N40G00X30Z5S700
N50X0
N60G01Z0F100
N70X25
这样,程序编写和输入就方便多了。
②指令的取消和替代G代码和M代码可分成不同的组(详见SIEMENS系统指令代码),同组中的代码,后编入的代码有效。
N40G00X30Z5
N50G01Z-25F100
N50中G01取消N40中的G00。
数控操作系统中有一些特殊的G指令和M指令,可直接取消其他规定的几个指令。
如:
G40取消G41、G42;M30程序结束,并执行M05(主轴停)、M09(切削液停)。
③初始状态各类数控机床尤其通电后的初始状态,常见的如绝对值编程、米制编程、取消刀补、切削液停、主轴停等。
10.编程的一般步骤
所谓编程,就是把零件的工艺过程、工艺参数及其他辅助动作,按动作顺序,按数控机床规定的指令、格式编成加工程序,将其记录于控制介质即程序载体(如磁盘),再输入控制装置,从而操纵机床进行加工。
手工编程的一般步骤
①确定工艺过程及工艺路线
确定工艺过程及工艺路线既要按一般工艺原则确定工艺方法,划分加工阶段,选择机床、刀具、切削用量及定位夹紧方法;又要根据数控机床加工特点,做到工序集中、换刀次数少、空行程路线短等。
②计算刀具轨迹的坐标值
根据零件的形状、尺寸,确定走刀路线,计算零件轮廓线上各几何要素的起点、终点、圆弧的圆心坐标。
若数控机床无刀具补偿功能,则应计算刀心轨迹。
当用直线、圆弧来逼近非圆曲线时,应计算曲线上各节点的坐标值。
③编写加工程序
手工编程适合零件形状较简单、加工工序较短、坐标计算较简单的场合;对于形状复杂(如空间自由曲线、曲面)、工序很长、计算繁琐的零件可采用计算机辅助编程。
④程序输入数控系统
可通过键盘直接将程序输入数控系统,也可采用计算机传输程序。
⑤程序检验
对有图形显示功能的数控机床,可进行图形模拟加工,检验刀具轨迹是否正确。
对无此功能的数控机床可进行机床空运行检验。
以上工作只能检验刀具运动轨迹的正确性,却检验不出对刀误差和某些计算误差引起的加工误差及加工精度误差。
因此,还要进行首件试切削。
可用铝、塑料、石蜡等易切削材料进行试切削。
试切削后若发现工件不符合要求,可修改程序或进行刀具补偿。
图20是手工编程的一般过程:
图20
三、刀具运动指令
1.绝对/相对尺寸(G90/G91)
绝对尺寸:
G90或X=AC(…)、Y=AC(…)、Z=AC(…)
增量尺寸:
G91或X=IC(…)、Y=IC(…)、Z=IC(…)
参数说明:
G90/G91为模态指令,AC/IC为非模态指令。
当G91生效时,在某一特定程序段AC允许某一坐标轴输入绝对尺寸;当G90生效时,在某一特定程序段IC允许某一坐标轴输入相对尺寸;
例如:
G90G00X100Y-20Z=IC(-2)
2.回转轴定位(DC,ACP,CAN)
指令形式:
A=DC(…)B=DC(…)C=DC(…)
A=ACP(…)B=ACP(…)C=ACP(…)
A=ACN(…)B=ACN(…)C=ACN(…)
参数说明:
A、B、C为旋转坐标名称。
DC为以最近距离直接接近定位点
ACP为正向接近定位点。
ACN为负向接近定位点。
附加说明:
在绝对尺寸编程中,回转轴运行范围设定在0°~360°之间。
在一个程序段中,如果进给范围大于360°,对于旋转坐标轴,必须在编制程序时采用增量尺寸编程,写入G91或IC。
3.米制/英制尺寸(G70/G71/G700/G710)
系统默认状态为G71米制尺寸
指令形式:
G70/G700英制尺寸
G71/G710米制尺寸
指令说明:
G70、G71、G700、G710均为模态指令。
G70、G71只对与工作直接相关的几何尺寸有效。
例如,坐标点的位置数据X、Y、Z;插补参数I、J、K;圆弧半径CR;可编程零点偏移(TRANS、ATRANS);极坐标半径RP。
G700、G710除了对与工作直接相关的几何尺寸有效以外,对进给速度F也有效。
其他几何尺寸,例如刀具补偿值、可设定零点偏置值,所采用的尺寸制状态可以通过机床数据设定。
系统默认状态为G71。
4.可设定零点偏置(工件坐标值,G54~G57)
指令形式:
G54~G57最基本的4个可设定的工件原点。
G500模态撤销所有可设定零点偏置。
模态机床坐标系
G53/G153非模态撤销当前零点偏置。
非模态机床坐标系
指令说明:
可以在机床运动的有效空间内任意指定一点,将其相对于机床坐标系的各轴坐标值输入G54~G57之中的任意一个,设定为工件原点。
这样的工件原点最多可以同时设定4个。
5.加工平面的选择(G17~G19)
指令形式:
G17加工平面X-Y进刀方向Z
G18加工平面Z-X进刀方向Y
G19加工方向Y-Z进刀方向X
指令说明:
G17平面为缺省的标准设定。
在做圆弧插补、使用刀具长度及半径补偿之前,必须先对加工平面进行规定。
6.可编程加工区域限制(G25/G26)
指令形式:
G25X…Y…Z…加工区域下限
G26X…Y…Z…加工区域上限
WALIMON加工区域限制生效
WALIMOF加工区域限制撤销
指令说明:
通过G25和G26指令,用户可以自行设计一个加工区域,而加工区域之外为保护区,刀具只能在加工区域内运动。
上述指令执行后将会立即生效。
当刀具长度补偿生效时,参考点是刀尖。
如果刀具定位在加工区域之外,或离开了该区域,程序将停止运行。
指令WALIMON为系统缺省设定,激活所有坐标轴的加工区域限制。
指令WALIMOF撤销所有坐标值的加工区域限制。
G25/G26还可用于在编程方式中限制主轴的转速,主轴的速度写在S地址上。
7.回参考点(G74)
指令形式:
G74X1=0Y1=0Z1=0(写在单独的程序段内)
指令说明:
G74回参考点。
X1、Y1、Z1、C1…,规定回参考点的坐标轴地址X1(X轴)、Y1(Y轴)、Z1(Z轴)、C1(C轴)…
机床通电后,由于采用的是增量位置检测系统,所有的坐标轴必须先回参考点,然后才能进行程序编写的进给运动。
回参考点时,各坐标轴的速度是由机床数据设定的,不能通过程序进行设定。
控制系统会自动检测出进给方向。
8.极坐标运动指令(G110、G111、G112,AP,RP)
指令形式:
(1)极点的定义
G110、G111、G112X…Y…Z…
G110、G111、G112AP=…RP=…
默认工件坐标系的原点为极点
(2)在极坐标系中的运动指令
G0AP=…RP=…
G1AP=…RP=…
G2AP=…RP=…
G3AP=…RP=…
指令说明:
G110以刀具前一点位置为参考点定义极点。
G91
G111以当前的工作原点为参考点,用绝对尺寸定义极点。
G90
G111X100Y50
G00AP=15RP=300
G112以前一个极点位置为参考点定义极点。
?
?
?
极点位置不能撤消,只能设回去G111X0Y0
如图2-12所示。
AP=极角,取值范围±0°~360°,角度为在加工平面内与第一坐标轴的夹角,旋转的正方向为逆时针方向。
在极点发生变化、平面重新选择或者输入一个新的极角度值之前,当前的AP值一直有效。
RP=极半径,以毫米或英寸为单位的绝对尺寸的正值。
在极点发生变化、平面重新选择或者输入一个新的极半径值之前,极坐标半径RP一直有效。
附加说明:
在G17~G19平面中,极坐标均有效。
也可以在圆柱坐标系中进行空间位置编程,
例如:
G17G0AP=…RP=…Z…
指令G110~112用于对极点的定义,不受绝对或增量尺寸(AC/IC)的影响。
可以在笛卡尔坐标系,也可以在极坐标系中规定坐标系的极。
如果没有对极坐标系的极进行规定,则默认工件坐标系的原点为极点。
在NC程序段之间可以进行极坐标系和笛卡尔坐标系之间的转换。
编程举例(图2-13)
N10G17G54
N20G111X43Y38;定义极坐标的极点
N30G0RP=30AP=18Z5;在圆柱坐标系中定位
N40L10;调用子程序
N50G91AP=72;以增量尺寸的极坐标快递定位到下一位置,N30程序段规定的极半径仍然有效,因而不需要再行规定。
N60L10
N70AP=IC(72)
N80L10
N90AP=IC(72)
N100L10
N110AP=IC(72)
N120L10
N130…
…
9.快速直线运动(G0)
指令形式:
G0X…Y…Z…;直角坐标系中
G0AP=…RP=…;极坐标系中
指令说明:
X、Y、Z、AP、RP为终点坐标。
G0编程的刀具运动时的进给速度为:
在考虑到所有参与轴的情况下所能达到的最高速度。
该指令为模态指令。
10.直线插补(G1)
指令形式:
G1X…Y…Z…F…
G1AP=…RP=…F…
指令说明:


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 840 培训 教案
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《彩云国物语》人物解析之红黎深转.docx
《彩云国物语》人物解析之红黎深转.docx
-
《大江保卫战》课堂呈现及教后反思.docx
-
《简单的轴对称图形第1课时》示范公开课教学设计北师大版七年级数学下册.docx
-
《建筑装饰构造》期末复习整理要点.docx
-
《傲慢与偏见》读书心得体会.docx
-
《投资分析》易错题练习.docx
-
《无机化学》自测练习题及答案.docx
-
《家春秋》读后感00字.docx
-
1合同草拟.docx
-
1至六年级古诗.docx
-
5藤野先生.docx
-
5以内加减法口算天天练强烈推荐125.docx
-
《陶渊明诗全集》全文古籍.docx
-
14年嵌入式软件试题.docx
-
12种瓜得豆电子教案六下册.docx
-
1B413060桥梁上部结构施工技术 小结.docx
-
《窗边的小豆豆》读后感450字.docx
-
100句永久珍藏的人生格言人生就像战场不是你死便是我活.docx
-
《建筑材料》教学总结.docx
-
150310 中国石化迈向绿色低碳新未来报道汇编宣传学习参考.docx
-
5S.docx
-
53高考英语新课标全国通用专题复习阅读补全七选五含最新两年高考一年模拟试题53.docx
-
《边城》省公开课一等奖课例赏鉴.docx
-
《网络营销》第三章教案搜索引擎营销的应用.docx
-
CMOS制作基本工艺解读.docx
-
11论文正文格式.docx
-
《嘉兴学院实验室开放实验项目总结报告》.docx
-
1试验室工作管理制度.docx
-
CENTOS44下的apache2+mysql5+php5+svn+memcache+ZendOptimizer+phpMyAdmin.docx
-
GE64排CT操作.docx
-
38妇女节慰问短信.docx
-
《滕王阁序》中的典故详释及成语.docx
-
七上U4Word格式文档下载.docx
-
创建文明城市工作汇报Word文档格式.docx
-
卓越英语1unit1classroomenglishWord文档下载推荐.docx
-
互联网金融的发展与监管毕业论文Word文档格式.docx
-
水果营销策划书范本模板Word文档格式.docx
-
创业书aWord格式.docx
-
钢结构施工管理措施Word文档格式.docx
-
《建设工程施工合同》通用范本docWord文件下载.docx
-
部编版二年级下语文最全复习资料汇总Word格式文档下载.docx
-
白光发光二极管的制作方法三紫外线及紫光LED加荧光粉Word文档格式.docx
-
XX国家森林公园旅游综合开发建设项目可行性研究报告Word下载.docx
-
构造地质学基本概念Word格式文档下载.docx
-
黄连上清丸饲鹤亭集方方剂加减变化汇总文档格式.docx
-
客户管理师考试模拟试题Word格式文档下载.docx
-
大国崛起观后感3000Word文档格式.docx
-
北京等通用卷地区中考语文真题汇编文学作品阅读Word格式.docx
-
5简支箱梁支架现浇施工作业指导书Word文档下载推荐.docx
-
常见的资源卫星影像数据区别Word文件下载.docx
-
安全标准资料第七册安全验收Word文档格式.docx
