 五邑大学计算机控制技术实验三 数字控制器仿真实验.docx
五邑大学计算机控制技术实验三 数字控制器仿真实验.docx
- 文档编号:29094872
- 上传时间:2023-07-20
- 格式:DOCX
- 页数:15
- 大小:1.34MB
五邑大学计算机控制技术实验三 数字控制器仿真实验.docx
《五邑大学计算机控制技术实验三 数字控制器仿真实验.docx》由会员分享,可在线阅读,更多相关《五邑大学计算机控制技术实验三 数字控制器仿真实验.docx(15页珍藏版)》请在冰豆网上搜索。
五邑大学计算机控制技术实验三数字控制器仿真实验
实验二数字控制器仿真实验
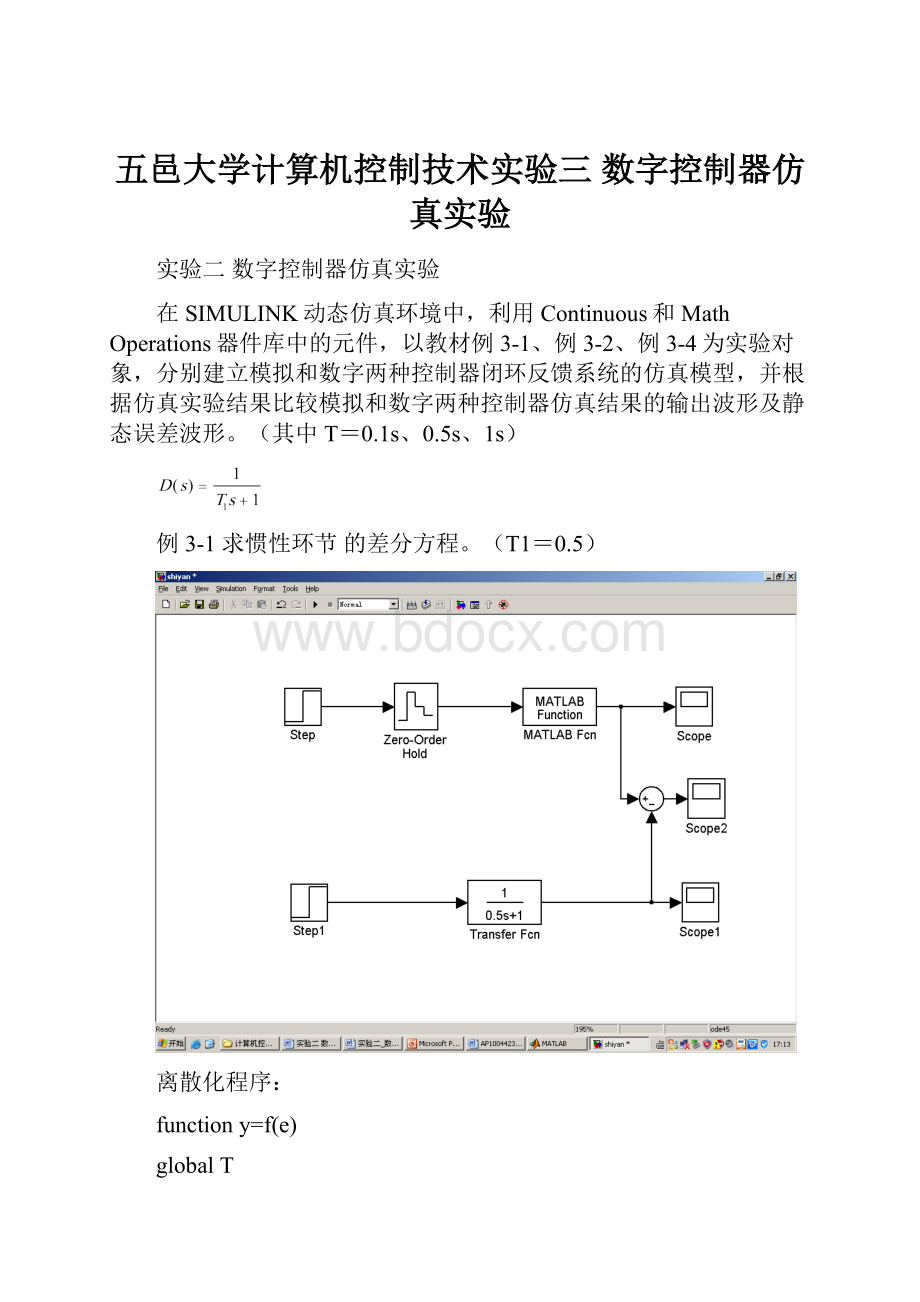
在SIMULINK动态仿真环境中,利用Continuous和MathOperations器件库中的元件,以教材例3-1、例3-2、例3-4为实验对象,分别建立模拟和数字两种控制器闭环反馈系统的仿真模型,并根据仿真实验结果比较模拟和数字两种控制器仿真结果的输出波形及静态误差波形。
(其中T=0.1s、0.5s、1s)
例3-1求惯性环节的差分方程。
(T1=0.5)
离散化程序:
functiony=f(e)
globalT
globalT1
globalu1
u=[T1/(T+T1)]*u1+[T/(T+T1)]*e;
u1=u;
y=u;
初始化程序:
globalT
globalT1
globalu1
T=0.1
T1=0.5
u1=0
离散图像:
T=0.1s时的图象分别如下
T=0.5s时的图象分别如下
T=1时的图象分别如下
与模拟图象:
静态误差波形:
(T=0.1)
(T=0.5)
(T=1)
例3-2求环节
的差分方程。
(T1=0.5)
离散化程序:
globalT
globalT1
globalu1
T=0.1
T1=0.5
u1=0
初始化程序:
globalT
globalT1
globalu1
globalu2
globalK
T=0.1
T1=0.5
u1=0
u2=0
K=0.1
每次仿真都要将u1和u2初始化为0.
离散图像:
T=0.1s时的图象分别如下
T=0.5s时的图象分别如下
T=1s时的图象分别如下
模拟的图像:
静态误差波形:
T=0.1时
T=0.5时
T=1时
例3-4已知某连续控制器的传递函数,试用双线性变换法求出相应数字控制器的脉冲传递函数D(z)。
解:
T=1时有:
T=0.5时有:
T=0.1时有:
T=1时的离散图象:
T=1时连续的图象:
T=1时的离散图象:
静态误差波形:
T=0.5时的离散图象:
静态误差图象:
T=0.1时的离散图象:
静态误差图象:


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 五邑大学计算机控制技术实验三 数字控制器仿真实验 大学计算机 控制 技术 实验 数字 控制器 仿真
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 #2机组现场施工用电布置措施.docx
#2机组现场施工用电布置措施.docx
-
《个人贵金属质押借款合同》兴业银行.docx
-
《科学发展观和小康社会的经济建设》复习导学案.docx
-
《我和祖父的园子》第一课时教案两篇word.docx
-
《质量》教学案例与设计.docx
-
2惠农小册子.docx
-
7A版个人与团队模拟考试题及答案.docx
-
10篇新部编四年级下册语文课内外阅读理解专项练习题及答案.docx
-
16初四物理热和能知识点总结精讲.docx
-
20XX社会语言经典语录流行风暴.docx
-
48篇教学案例分析报告题.docx
-
《电子工厂安全管理制度汇总》.docx
-
《机械制造课程设计》指导.docx
-
《钱学森》教案第二课时.docx
-
《边城》读后感5篇.docx
-
《固定式压力容器安全技术监察规程》.docx
-
《论雷峰塔的倒掉》.docx
-
《手术台就是阵地》教学设计三年级语文下册.docx
-
《夏洛的网》课外阅读教学设计.docx
-
《自己的花是让别人看的》教案.docx
-
3C检查表090429.docx
-
7客运专线CRTSⅡ型板式无砟轨道施工工法.docx
-
《笔算除法》课时教案设计.docx
-
11#楼高大模板支撑体系专项方案.docx
-
17科学分析经济形势.docx
-
《电流和电路》易错题精讲综合检测题与答案.docx
-
《会计信息系统》习题含答案.docx
-
《汽车电器设备与维修》发电机分教考分离试题及标准答案.docx
-
《四川省排污许可证管理暂行办法》.docx
-
《新编实用英语》教案第一册Unit.docx
-
0母版锅炉值班员计算题WORD版.docx
-
3年级下册英语单词记忆人教版.docx
-
27相似全章学案.docx
-
新编小学五年级数学上册寒假作业24.docx
-
巩固和扩大整改成果工作自查情况党建党委.docx
-
除数是两位数的口算除法综合练习题 73.docx
-
资阳某小区室外雨污道排项目施工设计方案secret.docx
-
动员大会发言稿精选多篇.docx
-
ModelEscrowAgreement.docx
-
东盛花园监理细则.docx
-
元旦最新经典对联大全优秀word范文 10页.docx
-
最新初中历史江苏省苏州市届九年级历史上册期中.docx
-
用友数据库表及数据字典.docx
-
《美容化妆学》课程标准.docx
-
工会系统考试综合练习真题精选.docx
-
尔雅通识漫画艺术与欣赏答案.docx
-
湖北省旅游包车合同.docx
-
《中药学》习题利水渗湿药精品文档.docx
-
年产60万吨镀锌板彩涂板项目可行性研究报告.docx
-
学习小组成员评价规定.docx
-
个人年度工作总结报告.docx
