 CaravelNet使用方法.docx
CaravelNet使用方法.docx
- 文档编号:2875790
- 上传时间:2022-11-16
- 格式:DOCX
- 页数:36
- 大小:5.54MB
CaravelNet使用方法.docx
《CaravelNet使用方法.docx》由会员分享,可在线阅读,更多相关《CaravelNet使用方法.docx(36页珍藏版)》请在冰豆网上搜索。
CaravelNet使用方法
1.新建项目
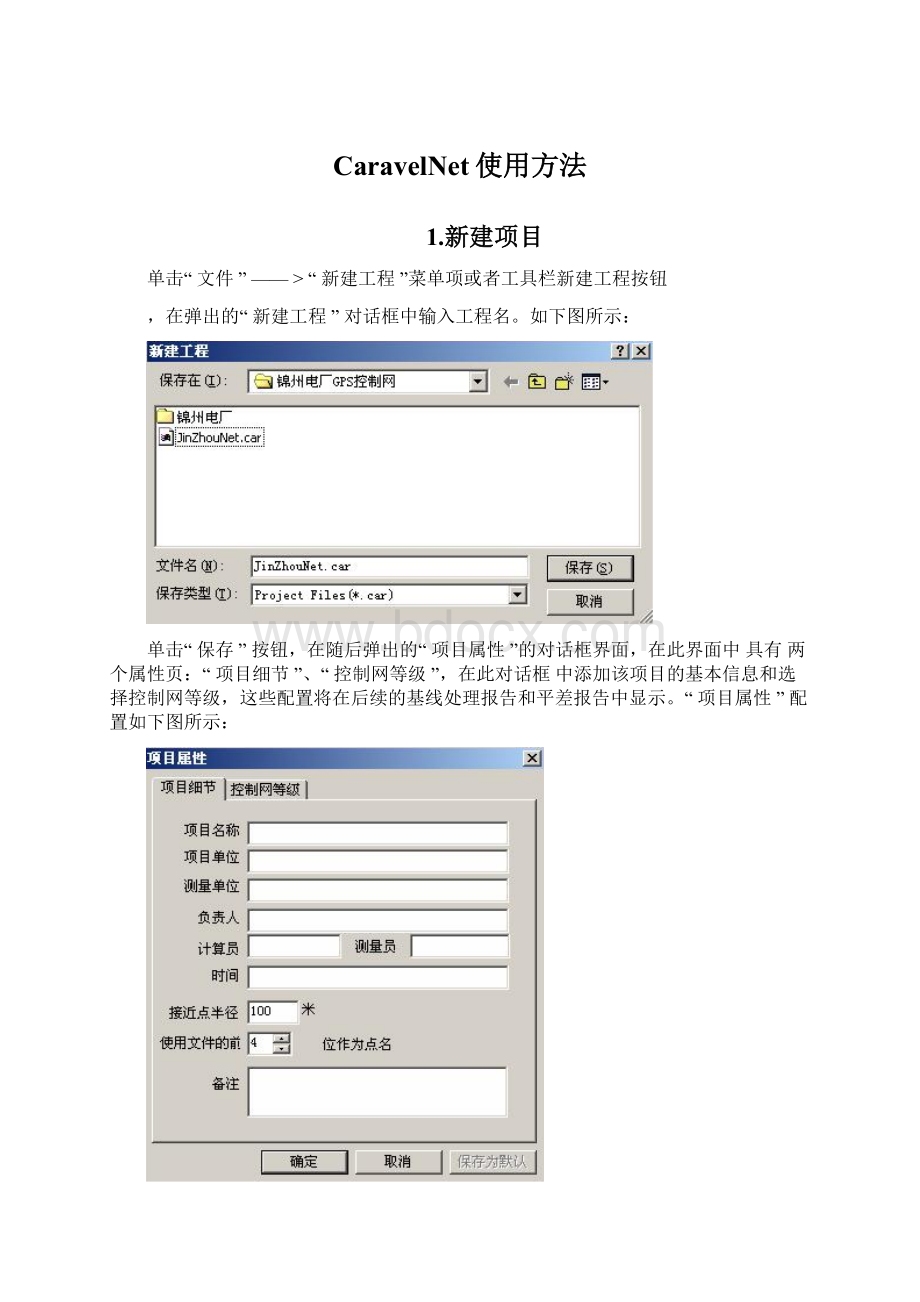
单击“文件”——>“新建工程”菜单项或者工具栏新建工程按钮
,在弹出的“新建工程”对话框中输入工程名。
如下图所示:
单击“保存”按钮,在随后弹出的“项目属性”的对话框界面,在此界面中具有两个属性页:
“项目细节”、“控制网等级”,在此对话框中添加该项目的基本信息和选择控制网等级,这些配置将在后续的基线处理报告和平差报告中显示。
“项目属性”配置如下图所示:
“项目属性”完毕后,点击“确定”按钮,则进入如下的“坐标系统设置”对话框界面,该对话框具有三个属性页,分别用于设置新建工程所在坐标系统的椭球参数、工程所在坐标系统与WGS-84的七个转换参数以及投影设置,其界面如下所示:
在确定以上的坐标系统配置输入正确之后,点击“确定”按钮将进入“导入观测数据文件”对话框,也可在“坐标系统配置”对话框中直接单击“取消”,进入“导入观测数据文件”对话框,然后在后面的“工程”——>“坐标系统配置”菜单中进行相应配置。
2.数据导入
在“导入观测数据文件”对话框中单击“添加”按钮,便进入“打开文件”对话框。
如下图所示:
选择正确的路径(原始数据文件所在的路径),并且在“打开”对话框中的“文件类型(I)”选择与原始数据文件相同后缀名的类型。
如下图所示:
在添加完观测数据文件后,如果需要可直接在列表框上对站名进行修改,以及天线半径和天线斜高的输入。
在对话框的相应位置双击,即可进入编辑状态,可以输入、修改(系统默认的天线半径以及天线斜高为0)。
如下图所示。
其中以“白色圆圈”表示的为测站,“灰线”表示两站之间存在基线。
系统在添加测站数据时,状态栏会显示当前已经添加的站数。
成功添加测站数据并完成单点定位后,“鼠标点击”任意测站将显示其基本信息,同时该测站在视图区由白色变为红色,如下图所示。
经度、纬度、高程为接近点的大地坐标;
表示有多少组接近点,上例中只有一组接近点,故组号为1
用户可以根据分组后的接近点对部分点进行相应的处理,同一个测站的将站名改位相同或进行剔除处理
3.基线解算
系统在完成新建工程并导入原始观测数据文件后,根据原始数据将自动进行单点定位和匹配基线,并在视图区显示各个测站及基线,此时用户就可以根据需要进行GPS网的相应数据处理。
3.1基线解算配置:
指水准面减椭球面的距离,单位为米;如果用户需要大地水准面的高程结果,必须准确输入此项
单击基线解算>基线解算配置菜单项或者点击工具栏上基线解算配置按钮
,在弹出的基线解算配置对话框中可对系统配置进行修改,如下图所示:
标准差是一种用于衡量偶然误差相对均值的离散程度的指标。
当有大量的相同质量的观测值时,标准差就是观测值相对于均值的偏差的平方和除以观测值的数量减一后再开方
设置最小高度角,单位为度,系统根据设置的掩角进行卫星选择,低于最小高度角的卫星将在解算过程中被系统剔除
指GPS时间减UTC时间的时间差,单位为秒,其具体数值会随着不同年份而不同,可查阅相关资料取得
快速静态静态定位时,如果用户使用的是双频或者高端接收机,建议用户选择快速静态。
用户采集数据的工作时间为10分钟左右。
普通静态静态定位时,如果用户使用的是单频或者低端接收机,建议用户选择普通静态。
用户采集数据的工作时间大概为30分钟左右。
设置无电离层组合基线的最短长度。
主要针对双频长基线的应用。
因为对于较长的基线,数据从卫星到达基站和流动站所穿越的电离层有很大的差距,采用差分的方法很难消除电离层误差,所以需要采用无电离层组合。
粗差限差是指系统在进行定位解算初始过程中的限制判断,表示系统将根据此设置范围内的观测数据才视为有效值,主要应用于粗差检测和粗差剔除使用。
包括单点定位标准差、码差分定位标准差、载波相位差分定位标准差和模糊度相位标准差。
桥接中历元内不同卫星定位点位互差,在桥接时使用,超出此限值,则认为两组卫星定位有不同的点位结果;双频电离层残差,用于双频桥接。
用户可以在基线解算配置各项中自行修改系统默认配置。
3.2基线解算
3.2.1解算全部基线
单击“基线解算”——>“解算全部基线”或单击工具栏上的
图标,系统将进行基线解算,如下图所示:
系统将进行基线解算的状态,如下图所示:
在基线解算时,状态栏将以进度条和数字的形式显示当前已处理的历元数。
同时,对于成功解算的基线,解算完毕后基线颜色将从灰白色变为绿色,如上图所示。
基线解算过程中“基线解算”——>“基线解算”菜单项或工具栏上的“基线解算”按钮
将变为不可用状态。
进行基线解算之前,可以先在“基线解算”——>“基线解算配置”中对解算基线的相关参数进行配置,当然也可使用系统默认的参数。
解算完基线之后如下图所示(本例使用系统默认的参数):
解算完毕的基线,通过“鼠标单击”该基线可以显示该基线的基本信息,同时选中的基线将变为淡红色。
如下图所示:
对于选中的基线,可以设置是否参与平差
网图设置:
在网图中单击“鼠标右键”将弹出右键属性——对网图的显示设置,如下图示:
选择“网图显示设置”,如下图所示:
单击“网图显示设置”之后将弹出“网图属性”对话框,可进行网图显示的设置:
改变基线的颜色,是否显示箭头、网格等等。
如下图所示:
基线全部解算成功的情况:
基线解算完毕后将以文本文档形式自动弹出基线解算报告以供用户查看。
用户还可以通过菜单栏的报告>GPS基线解算报告得到基线解算报告。
3.2.2解算选定基线
将鼠标移到一条基线上,单击鼠标“右键”,选择“解算基线配置”,可以对该条基线进行配置。
如下图所示:
单击“解算基线配置”后将弹出,解算基线的对话框,在解算基线配置中已经有介绍。
如下图所示:
3.2.3解算不合格基线
1.单击基线解算>基线解算配置菜单项或者点击工具栏上基线解算配置按钮
,在弹出的基线解算配置对话框中对系统配置进行修改。
2.再单击“基线解算”——>“解算不合格基线”将对解算不合格的所有基线进行重新解算。
3.2.4搜索基线闭合差
1.单击“基线解算”——>“搜索基线闭合差”将进行搜索闭合差计算,并且将搜索的结果写成报告。
如下图所示:
4.平差处理
平差处理是GPS静态数据处理的最后一个阶段。
在这一阶段中,基线解算所得到的基线向量被当作观测值,基线向量的验后方差-协方差阵则被用来确定观测值的权阵,同时引入适当的基准数据,通过参数估计的方法确定出网中各点的坐标。
通过网平差还可以发现含有粗差的基线向量,并采取相应的方法进行处理。
另外,网平差还可以消除由于基线向量误差而引起的几何矛盾,并评定观测成果的精度。
(平差处理就是将各圈的闭合差合理地分配到自己闭合圈的各边段上去,使闭合差为零或小于规定的误差要求)
CaravalNet数据处理按GPS网的数据处理流程主要分为三维无约束平差、三维约束平差和二维平差,各步相互衔接,前一步为后一步提供平差数据,后一步对前一步的所得到的数据进行处理以获得用户所需的结果信息,并检验和反馈前一步所得到结果的准确性。
下面将按GPS网测量数据处理的流程来介绍CaravalNet中的数据处理功能。
4.1三维已知信息配置
主要是指在三维约束平差中引入固定点,从而为三维平差提供位置基准、方位基准以及尺度基准。
由于一个GPS网基准的确定需要7个转换参数(三个平移参数、三个轴旋转参数以及一个尺度参数),而一个三维固定点能够提供3个方程,因此至少需要3个三维固定点才能进行三维约束平差。
若用户没有添加三个或三个以上的三维固定点,则由于基准条件不足不能进行三维约束平差。
三维已知信息配置对话框具体使用如下:
单击平差处理>三维已知信息配置菜单项,或者点击工具栏上的三维已知信息配置按钮
,系统将弹出三维已知信息配置对话框,初始状态的坐标为单点定位的结果,平差之后则变为平差后的坐标。
三维已知信息配置对话框如下图所示:
4.2三维无约束平差
三维无约束平差是以基线解算所得到的三维静态基线向量为观测值,基线向量的验后方差-协方差阵作为观测值的权阵,各测站点的坐标作为未知数进行的平差。
整个GPS网的尺度基准和方位基准是由基线向量确定的,位置基准则采用秩亏自由网平差的方法利用重心作为位置基准。
三维无约束平差是整个数据处理过程中很重要的一个环节,其得到的结果最符合整个GPS网的内符合精度,可根据平差结果确定观测值中是否存在粗差基线,从而调整基线向量的权,使得观测值与其权阵相互匹配。
另外无约束平差得到的单位权中误差可用于确定平差的随机模型——权阵是否含有系统误差,从而通过X方检验消除随机模型误差。
单击平差处理>三维无约束平差菜单项或者点击工具栏上按钮
即可进行三维无约束平差,三维无约束平差完毕将自动弹出三维无约束平差报告。
如下图:
4.3三维约束平差
三维约束平差是以基线解算所得到的三维静态基线向量为观测值,基线向量的验后方差-协方差阵或在无约束平差中经过调整后的权阵作为观测值的权阵,在平差过程中引入三个以上的固定点作为基准(位置基准、尺度基准、方位基准)进行平差,从而得到在指定坐标系统和基准下的经过用户约束条件限制的各测站点的三维空间坐标和精度以及用户指定的坐标系统与WGS-84坐标系统的四个转换参数(三个旋转因子和一个尺度因子)。
单击平差处理>三维约束平差菜单项或者点击工具栏上三维约束平差按钮
即可进行三维约束平差,三维约束平差完毕后将自动弹出三维约束平差报告。
如下图:
如果没有三个以上的三维固定点,系统由于条件不足将不进行三维约束平差,并提示如下错误信息:
4.4二维已知信息配置
主要是指为二维平差中引入固定点和已知方位角信息,从而为平差提供位置基准和方向基准。
单击平差处理>二维已知信息配置菜单项,或者点击工具栏上二维已知信息配置按钮
,即可进入二维已知信息配置的对话框。
二维已知信息配置对话框如下图所示:
(该属性页的使用方法与三维已知信息配置对话框的使用基本一样,可参考三维已知信息配置对话框的帮助使用本对话框)
1、二维点固定
2、方向角固定
选择所要固定边的起始点和终止点,然后单击添加,列表框将显示添加的方向角。
系统默认添加的固定方向角大小为0,若要改变方向角大小,可直接在列表框内修改。
若要将固定的方位角删除,选中列表框内对应的条目,单击删除即可。
4.5二维平差
二维平差也是以基线解算所得到的三维静态基线向量和经过无约束平差调整的方差-协方差阵(如果调整过)为基础,将三维基线和三维权阵投影转化为高斯平面上的二维基线和二维权阵,以得到的二维基线为观测值,以及经过误差传播的二维方差-协方差阵为权阵,在平差过程中至少引入一个固定点平面坐标和一个固定方位角信息或两个固定点平面坐标作为外部起算数据,实现GPS网成果在维数上的转换,得到在地方独立坐标系下的经过用户约束条件约束的二维平面点坐标和地方独立坐标系与国家坐标系间的转换参数。
如果没有足够的固定点或固定角来提供位置基准、方位基准和尺度基准,则以秩亏自由网平差的形式进行处理。
单击平差处理>二维约束平差菜单项或者点击工具栏上二维约束平差按钮
即可进行二维约束平差,二维约束平差完毕将自动弹出二维平


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- CaravelNet 使用方法
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 转基因粮食的危害资料摘编Word下载.docx
转基因粮食的危害资料摘编Word下载.docx
-
高中英语词组大全Word文档下载推荐.docx
-
卫计局年工作总结及新年工作计划Word格式.docx
-
贵州省煤矿安全管理人员安全资格证A考试概况Word格式.docx
-
系统集成项目招标文件Word文件下载.docx
-
电子商务考试题总汇打印版打印打印Word下载.docx
-
选调生考试备考言语理解与表达真题Word文档格式.docx
-
高考物理实验题专练 专练15Word文档格式.docx
-
加装奥迪A4L蓝牙电话功能Word文档下载推荐.docx
-
学年下学期好教育高三月考仿真卷A卷 语文 学生版后附详解Word文档下载推荐.docx
-
净化生产车间工程一般施工技术施工方案Word文档格式.docx
-
内蒙古呼和浩特市第六中学学年高一政治下学期期末考试试题Word下载.docx
-
证券行业客户经理电话营销技巧与实例Word文档下载推荐.docx
-
叶芝 苇间风文档格式.docx
-
最新中美贸易摩擦的原因及解决对策1论文Word文件下载.docx
-
意义的近义词Word格式文档下载.docx
-
上海市中考英语试题S.docx
-
专题12观点论证类设问.docx
-
附加安心重疾条款.docx
-
设计变更管理办法修改意见稿FINAL汇编.docx
-
毕业赠言毕业致词精选多篇.docx
-
银行新员工代表发言稿精选多篇.docx
-
北京市朝阳区届高三第一学期期末语文试题Word版含答案.docx
-
HL线切割使用说明书模板.docx
-
车工实训周记.docx
-
USBHID键盘扫描码.docx
-
Apmpoqu4调研报告.docx
-
最熟悉的陌生人作文八篇.docx
-
被动语态综合讲解.docx
-
部编版语文七上第五单元16猫同步练习试题.docx
-
软件体系结构作业2.docx
-
钢管管道安装焊接施工工艺.docx
-
三国演义读书笔记集锦15篇Word格式文档下载.docx
-
新人教版 选择性必修2 生态系统的信息传递 教案文档格式.docx
-
探讨我国反倾销应诉中会计举证问题文档格式.docx
-
清明节扫墓策划书精选多篇Word格式文档下载.docx
-
外墙涂料施工方案方案值得参考文档格式.docx
-
浅谈离婚精神损害赔偿Word文档格式.docx
-
新媒体环境下的品牌策划尔雅答案Word文档格式.docx
-
武广客运专线武汉工程试验段路基工程施工技术细则文档格式.docx
-
提升青年教师的职业幸福指数Word格式文档下载.docx
-
消防员技能训练文档格式.docx
-
图为社区敬老宣讲教育现场1Word下载.docx
-
庆祝八一建军节活动策划实施方案7篇文档格式.docx
-
新人教版秋八年级英语上册Unit 9单元教学案Word文件下载.docx
-
天宫课堂直播观后感300字Word文档下载推荐.docx
-
全年工作总结Word文档格式.docx
-
人教版二年级下册数学易错题总汇Word格式文档下载.docx
-
土钉墙深基坑专项安全施工方案Word文档下载推荐.docx
-
新闻评论写作Word文档格式.docx
-
数控课程设计文档格式.docx
