 东南大学统计信号处理实验实验三解析.docx
东南大学统计信号处理实验实验三解析.docx
- 文档编号:28618497
- 上传时间:2023-07-19
- 格式:DOCX
- 页数:21
- 大小:321.50KB
东南大学统计信号处理实验实验三解析.docx
《东南大学统计信号处理实验实验三解析.docx》由会员分享,可在线阅读,更多相关《东南大学统计信号处理实验实验三解析.docx(21页珍藏版)》请在冰豆网上搜索。
东南大学统计信号处理实验实验三解析
统计信号处理实验三
目的:
掌握卡尔曼滤波滤波器的原理;
内容:
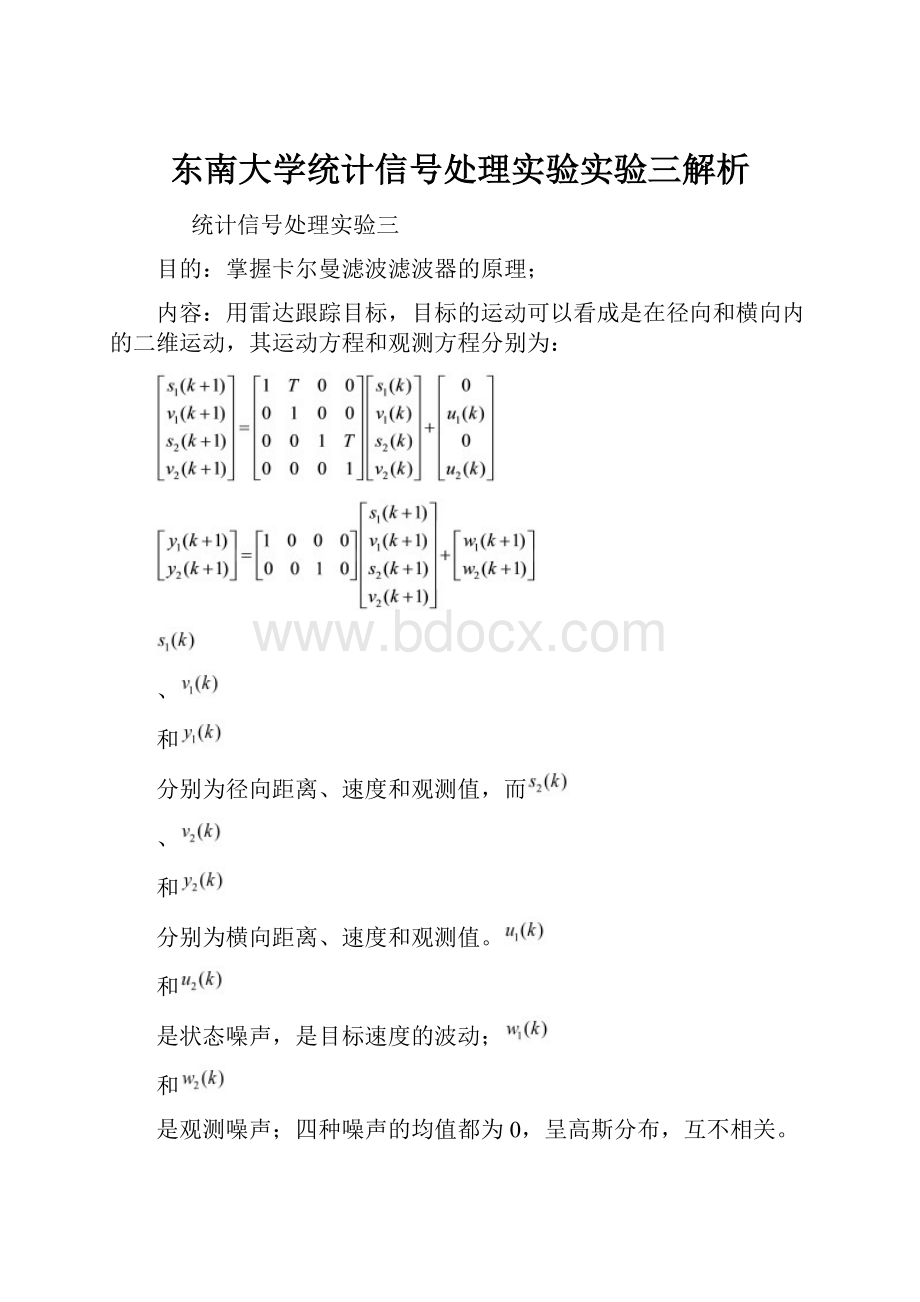
用雷达跟踪目标,目标的运动可以看成是在径向和横向内的二维运动,其运动方程和观测方程分别为:
、
和
分别为径向距离、速度和观测值,而
、
和
分别为横向距离、速度和观测值。
和
是状态噪声,是目标速度的波动;
和
是观测噪声;四种噪声的均值都为0,呈高斯分布,互不相关。
T是雷达扫描一次的时间,此处设为1.0秒。
假设目标距离雷达约160Km左右,径向初速度设为300m/s,并且在向雷达靠近,横向初速度设为0m/s。
这样它的径向速度波动大,而横向速度波动小,所以我们假设
的方差
为300m/s,
的方差
为
m/s。
鉴于雷达的观测误差,我们假设观测噪声
和
的方差
和
均为1.0Km。
其中
,
,
和
的初始值不是最佳的,学生完全可自己修改以上参数,并观察计算结果的变化,给出最好的滤波效果。
任务:
1)试用
滤波法对信号进行处理,并通过计算机模拟对其跟踪过程进行验证;
2)试求其Kalman滤波方程,并通过计算机模拟对其跟踪过程进行验证;
3)假设目标在运动过程中发生了机动(速度在某个时刻突然发生了改变),试观测此时的
滤波和Kalman滤波结果,并对结果进行解释。
要求:
1)设计仿真计算的Matlab程序,给出软件清单;
2)完成实验报告,给出实验结果,并对实验数据进行分析。
(1)
滤波法对信号进行处理。
clear;
alfa=0.6;
beta=0.4;
sigma_u1=0.3;
sigma_u2=0.2;
sigma_w=0.1;
T=1;
s1=[12zeros(1,499)];
s2=[7zeros(1,499)];
v1=[15zeros(1,499)];
v2=[4zeros(1,499)];
y1=[zeros(1,500)];
y2=[zeros(1,500)];
A=[1T00;0100;001T;0001];
C=[1000;0010];
X=[s1;v1;s2;v2];
X0=[11.8zeros(1,499);13.8zeros(1,499);6.8zeros(1,499);3.9zeros(1,499)];
Y=[y1;y2];
Y0=[y1;y2];
u1=sigma_u1*randn(1,500);
u2=sigma_u2*randn(1,500);
w1=sigma_w*randn(1,500);
w2=sigma_w*randn(1,500);
M=500;
fori=1:
M-1;
X(:
i+1)=A*X(:
i)+[0;u1(i);0;u2(i)];
Y(:
i+1)=C*X(:
i+1)+[w1(i+1)w2(i+1)]';
end
s1=X(1,:
);
v1=X(2,:
);
s2=X(3,:
);
v2=X(4,:
);
K=[alfa0;beta/T0;0alfa;0beta/T];
M=500;
fori=1:
M-1;
X1(:
i+1)=A*X0(:
i);
X0(:
i+1)=X1(:
i+1)+K*[Y(1,i+1)-X1(1,i+1);Y(2,i+1)-X1(3,i+1)];
Y0(:
i+1)=C*X0(:
i+1);
end
t=0:
499;
figure
(1);
plot(X(3,:
),X(1,:
),'b',X0(3,:
),X0(1,:
),'r');
h=legend('真实值','估计值');
xlabel('s2');ylabel('s1');title('alfa-beta滤波');
gridon;
figure
(2);
plot(t,X(2,:
),'b',t,X0(2,:
),'r');
h=legend('真实值','估计值');
xlabel('t');ylabel('v1');title('alfa-beta滤波v1');
gridon;
figure(3);
plot(t,X(4,:
),'b',t,X0(4,:
),'r');
h=legend('真实值','估计值');
xlabel('t');ylabel('v2');title('alfa-beta滤波v2');
gridon;
取值alfa=0.8;beta=0.2;
第二个取值下的估计效果较差。
2)试求其Kalman滤波方程,并通过计算机模拟对其跟踪过程进行验证;
clear;
clc;
sigma_u1=0.3;
sigma_u2=0.2;
sigma_w=0.1;
T=1;
s1=[12zeros(1,499)];
s2=[7zeros(1,499)];
v1=[15zeros(1,499)];
v2=[4zeros(1,499)];
y1=[zeros(1,500)];
y2=[zeros(1,500)];
A=[1T00;0100;001T;0001];
C=[1000;0010];
Q=[0000;0sigma_u100;0000;000sigma_u2];
R=[sigma_w0;0sigma_w];
I=[1000;0100;0010;0001];
P2=[sigma_wsigma_w/T00;
sigma_w/Tsigma_u1+2*sigma_w/(T^2)00;
00sigma_wsigma_w/T;
00sigma_w/Tsigma_u2+2*sigma_w/(T^2)];
X=[s1;v1;s2;v2];
X0=[11.8zeros(1,499);13.8zeros(1,499);6.8zeros(1,499);3.9zeros(1,499)];
Y=[y1;y2];
Y0=[y1;y2];
u1=sigma_u1*randn(1,500);
u2=sigma_u2*randn(1,500);
w1=sigma_w*randn(1,500);
w2=sigma_w*randn(1,500);
M=500;
fori=1:
M-1;
X(:
i+1)=A*X(:
i)+[0;u1(i);0;u2(i)];
Y(:
i+1)=C*X(:
i+1)+[w1(i+1)w2(i+1)]';
end
s1=X(1,:
);
v1=X(2,:
);
s2=X(3,:
);
v2=X(4,:
);
fori=1:
M-1;
ifi==1
P1=A*P2*A'+Q;
else
P1=A*P0*A'+Q;
end
K=P1*C'*inv(C*P1*C'+R);
X1(:
i+1)=A*X0(:
i)
X0(:
i+1)=X1(:
i+1)+K*(Y(:
i+1)-C*X1(:
i+1));
Y0(:
i+1)=C*X0(:
i+1);
P0=(I-K*C)*P1;
end
t=1:
500;
figure
(1);
plot(X(3,:
),X(1,:
),'b',X0(3,:
),X0(1,:
),'r');
h=legend('真实值','估计值');
xlabel('s2');ylabel('s1');title('Kalman滤波的距离');
gridon;
figure
(2);
plot(t,X(2,:
),'b',t,X0(2,:
),'r');
h=legend('真实值','估计值');
xlabel('t');ylabel('v1');title('Kalman滤波的v1');
gridon;
figure(3);
plot(t,X(4,:
),'b',t,X0(4,:
),'r');
h=legend('真实值','估计值');
xlabel('t');ylabel('v2');title('Kalman滤波的v2');
gridon;
3)假设目标在运动过程中发生了机动(速度在某个时刻突然发生了改变),试观测此时的
滤波和Kalman滤波结果,并对结果进行解释。
①
滤波
clear;
clc;
alfa=0.6;
beta=0.4;
sigma_u1=0.3;
sigma_u2=0.2;
sigma_w=0.1;
T=1;
s1=[12zeros(1,499)];
s2=[7zeros(1,499)];
v1=[15zeros(1,499)];
v2=[4zeros(1,499)];
y1=[zeros(1,500)];
y2=[zeros(1,500)];
A=[1T00;0100;001T;0001];
C=[1000;0010];
X=[s1;v1;s2;v2];
X0=[11.8zeros(1,499);13.8zeros(1,499);6.8zeros(1,499);3.9zeros(1,499)];
Y=[y1;y2];
Y0=[y1;y2];
u1=sigma_u1*randn(1,500);
u2=sigma_u2*randn(1,500);
w1=sigma_w*randn(1,500);
w2=sigma_w*randn(1,500);
M=500;
fori=1:
M-1;
X(:
i+1)=A*X(:
i)+[0;u1(i);0;u2(i)];
ifi==199
X(2,i+1)=X(2,i+1)+10;
X(4,i+1)=X(4,i+1)+10;
end
Y(:
i+1)=C*X(:
i+1)+[w1(i+1)w2(i+1)]';
end
s1=X(1,:
);
v1=X(2,:
);
s2=X(3,:
);
v2=X(4,:
);
K=[alfa0;beta/T0;0alfa;0beta/T];
M=500;
fori=1:
M-1;
X1(:
i+1)=A*X0(:
i);
X0(:
i+1)=X1(:
i+1)+K*[Y(1,i+1)-X1(1,i+1);Y(2,i+1)-X1(3,i+1)];
Y0(:
i+1)=C*X0(:
i+1);
end
t=0:
499;
figure
(1);
plot(X(3,:
),X(1,:
),'b',X0(3,:
),X0(1,:
),'r');
h=legend('真实值','估计值');
xlabel('s2');ylabel('s1');title('alfa-beta滤波的距离');
gridon;
figure
(2);
plot(t,X(2,:
),'b',t,X0(2,:
),'r');
h=legend('真实值','估计值');
xlabel('t');ylabel('v1');title('alfa-beta滤波的v1');
gridon;
figure(3);
plot(t,X(4,:
),'b',t,X0(4,:
),'r');
h=legend('真实值','估计值');
xlabel('t');ylabel('v2');title('alfa-beta滤波的v2');
gridon;
②卡尔曼滤波
clear;
clc;
sigma_u1=0.3;
sigma_u2=0.2;
sigma_w=0.1;
T=1;
s1=[12zeros(1,499)];
s2=[7zeros(1,499)];
v1=[15zeros(1,499)];
v2=[4zeros(1,499)];
y1=[zeros(1,500)];
y2=[zeros(1,500)];
A=[1T00;0100;001T;0001];
C=[1000;0010];
Q=[0000;0sigma_u100;0000;000sigma_u2];
R=[sigma_w0;0sigma_w];
I=[1000;0100;0010;0001];
P2=[sigma_wsigma_w/T00;
sigma_w/Tsigma_u1+2*sigma_w/(T^2)00;
00sigma_wsigma_w/T;
00sigma_w/Tsigma_u2+2*sigma_w/(T^2)];
X=[s1;v1;s2;v2];
X0=[11.8zeros(1,499);13.8zeros(1,499);6.8zeros(1,499);3.9zeros(1,499)];
Y=[y1;y2];
Y0=[y1;y2];
u1=sigma_u1*randn(1,500);
u2=sigma_u2*randn(1,500);
w1=sigma_w*randn(1,500);
w2=sigma_w*randn(1,500);
M=500;
fori=1:
M-1;
X(:
i+1)=A*X(:
i)+[0;u1(i);0;u2(i)];
ifi==199
X(2,i+1)=X(2,i+1)+8;
X(4,i+1)=X(4,i+1)+8;
end
Y(:
i+1)=C*X(:
i+1)+[w1(i+1)w2(i+1)]';
end
s1=X(1,:
);
v1=X(2,:
);
s2=X(3,:
);
v2=X(4,:
);
fori=1:
M-1;
ifi==1
P1=A*P2*A'+Q;
else
P1=A*P0*A'+Q;
end
K=P1*C'*inv(C*P1*C'+R);
X1(:
i+1)=A*X0(:
i);
X0(:
i+1)=X1(:
i+1)+K*(Y(:
i+1)-C*X1(:
i+1));
Y0(:
i+1)=C*X0(:
i+1);
P0=(I-K*C)*P1;
end
t=1:
500;
figure
(1);
plot(X(3,:
),X(1,:
),'b',X0(3,:
),X0(1,:
),'r');
h=legend('真实值','估计值');
xlabel('s2');ylabel('s1');title('白噪声下Kalman滤波');
gridon;
figure
(2);
plot(t,X(2,:
),'b',t,X0(2,:
),'r');
h=legend('真实值','估计值');
xlabel('t');ylabel('v1');title('Kalman滤波的v1');
gridon;
figure(3);
plot(t,X(4,:
),'b',t,X0(4,:
),'r');
h=legend('真实值','估计值');
xlabel('t');ylabel('v2');title('Kalman滤波的v2');
gridon;


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 东南大学 统计 信号 处理 实验 解析
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《贝的故事》教案4.docx
《贝的故事》教案4.docx
-
《对韵歌》优秀教案8.docx
-
《函数yAsinωx+φ+P图象》wwwnet.docx
-
《静夜思》教学设计.docx
-
《汽车底盘构造与维修》题库与考核标准.docx
-
《世说新语》复习资料.docx
-
《我的服装我做主》教案设计.docx
-
《在品味情感中成长》教学片断设计.docx
-
11造价员《建设工程造价管理基础知识》精讲教程文件.docx
-
《不会叫的狗》教案 人教部编版1.docx
-
《操作系统》二学期A卷及答案.docx
-
《傅雷家书》名著阅读笔记.docx
-
《反不正当竞争法》下互联网平台封禁行为考辨以消费者用户合法权益保护为中心.docx
-
《化工原理》第六章蒸发.docx
-
《蓝海战略》概要11页.docx
-
《人生》读书心得.docx
-
《荷叶圆圆》公开课教案优秀教学设计26.docx
-
《科技出行研究报告》智能网联与新能源将变革未来汽车出行.docx
-
《272 向量的应用举例》导学案1.docx
-
《秋天》评课稿.docx
-
《电算化》第二章会计电算化的工作环境章节练习.docx
-
《室外给排水管道》施组.docx
-
《广东省建筑与装饰工程综合定额》计算规则.docx
-
《我多想去看看》教学.docx
-
《直通车车手基础认证》 考试答案 70题之欧阳育创编.docx
-
7天销量翻10倍皇冠卖家教您玩转最精准流量.docx
-
9 阿长和山海经.docx
-
《比例尺》教案.docx
-
《菜根谭》注译四闲适篇.docx
-
《福尔摩斯探案集》读后感15篇.docx
-
《红对勾》古代诗歌选择题答案补充.docx
-
《课堂密码》读后感及心得精选多篇.docx
-
跨年心情说说.docx
-
环境污染防治理论与应用.docx
-
认识实习.docx
-
最新总结范文之车间危险源学习总结.docx
-
湖北省枣阳市中考适应性考试理综试题.docx
-
公需科目专业技术人员职业幸福感的提升考试题答案.docx
-
课程设计vb.docx
-
集约化养猪技术手册.docx
-
数据库题库7X86及虚拟化L12之欧阳组创编.docx
-
汽车4S店销售服务及营销战略分析.docx
-
汽车驾驶员技师证新版试题及答案.docx
-
广州海珠区晓港湾小学电房改造工程.docx
-
两小儿辩日原文及翻译.docx
-
浅析师宗民歌的艺术特色.docx
-
青岛方言大全.docx
-
全新版大学英语第二版综合教程4课后练习答案.docx
-
红安教育心得体会.docx
-
简单的生日祝福语大全.docx
-
作风方面突出问题整改措施共5篇.docx
