 第1包电机控制传感器和机器人实验教学设备.docx
第1包电机控制传感器和机器人实验教学设备.docx
- 文档编号:28604648
- 上传时间:2023-07-19
- 格式:DOCX
- 页数:47
- 大小:27.62KB
第1包电机控制传感器和机器人实验教学设备.docx
《第1包电机控制传感器和机器人实验教学设备.docx》由会员分享,可在线阅读,更多相关《第1包电机控制传感器和机器人实验教学设备.docx(47页珍藏版)》请在冰豆网上搜索。
第1包电机控制传感器和机器人实验教学设备
第1包:
电机控制、传感器和机器人实验教学设备
品目号
设备名称
主要技术参数及配置要求
台套数
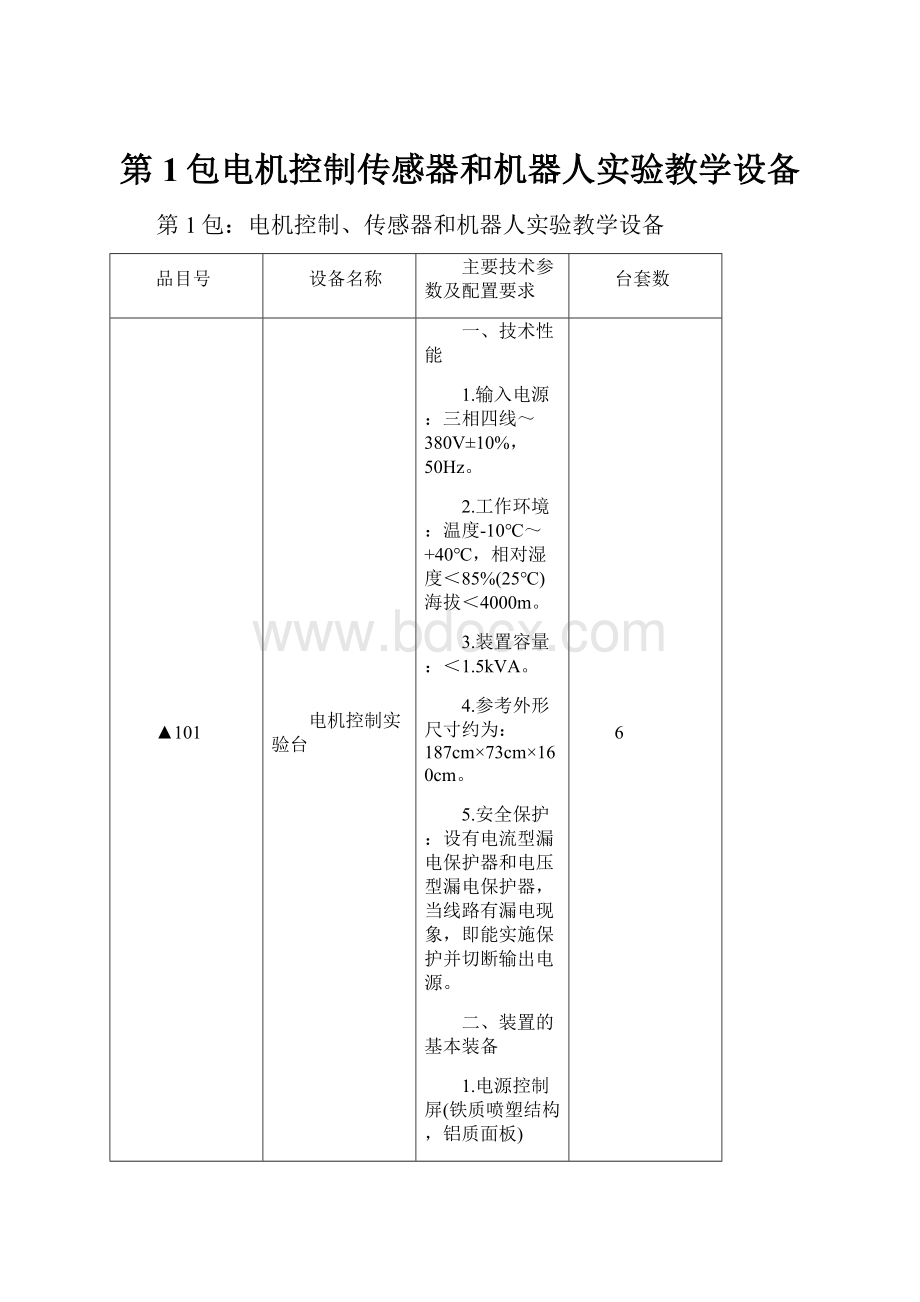
▲101
电机控制实验台
一、技术性能
1.输入电源:
三相四线~380V±10%,50Hz。
2.工作环境:
温度-10℃~+40℃,相对湿度<85%(25℃)海拔<4000m。
3.装置容量:
<1.5kVA。
4.参考外形尺寸约为:
187cm×73cm×160cm。
5.安全保护:
设有电流型漏电保护器和电压型漏电保护器,当线路有漏电现象,即能实施保护并切断输出电源。
二、装置的基本装备
1.电源控制屏(铁质喷塑结构,铝质面板)
(1)交流电源
提供三相0~450V可调交流电源,同时可得到单相0~250V可调的交流电源。
可调交流电源输出处设有过流保护装置,当相间、线间过电流及直接短路均能自动保护。
配有三只指针式交流电压表,通过切换开关,可指示三相电网电压和三相调压电压。
(2)高压直流电源两路
提供220V(0.5A)励磁电源及40~250V(3A)连续可调稳压电枢电源(具有过压、过流、过热及短路软截止自动恢复保护功能)各一组,并设有直流数显电压表及切换开关。
(3)人身安全保护五大体系
设有三相隔离变压器一组(三相电源经钥匙开关和接触器后,到隔离变压器,再经三相调压器输出),使输出与电网隔离,对人身安全起到一定的保护作用;
设有电压型漏电保护器1,如果隔离变压器前的线路有漏电现象,即能实施保护并切断输出电源;
设有电压型漏电保护器2,如果隔离变压器后的线路及实验过程中的接线等有漏电现象,即能告警并切断输出电源;
设有电流型漏电保护器,控制屏若有漏电现象,当漏电流超过一定值时,即切断电源;
强电连接线及插座,采用全封闭结构,使用安全、可靠、防触电。
(3)仪表保护体系
设有多只信号插座,与仪表相连。
当仪表超量程时,即能告警并切断输出电源,对仪表起到良好的保护作用。
(4)定时器兼报警记录仪(服务管理器):
具有设定时间、到时报警、切断电源及记录各种告警次数等功能。
(5)控制屏正面大凹槽内,设有两根不锈钢钢管,可挂仪表及实验部件。
凹槽底部设有多个蓝色单相三芯220V电源插座以及七芯航空插座,给仪表等部件供电及通信用。
控制屏两侧设有单相三极220V电源插座及三相四极380V电源插座。
实验台照明用220V、40W的日光灯一盏。
★(6)实验室智能电源管理系统(整个实验室配1套)。
★(7)输入电压:
三相四线制380V±10%,50Hz;上电前合闸条件检测:
输入过压、欠压、对地漏电、过流、任一故障存在不合闸,并且进行普通话语音报警;运行检测保护:
输入过压、欠压、输出过流、漏电,任一故障出现将自动跳闸,实施保护,并且进行普通话语音报警,保护阀值现场可设置;实训室总体智能电源管理系统上电前合闸条件检测,符合上电条件后,实训室总体智能电源管理系统自动合闸,恢复供电;具有实时电压显示/故障次数显示。
★(8)含隔离通道测试模块2台:
可同时连接测试4个不同电压信号和电流信号:
电压衰减倍数:
*10、*100;电流衰减倍数:
*2、*10;电压输入范围:
≦59VP-P(*10档);≦590VP-P(*100档);电流输入范围:
≦5A(*2档);≦25A;(*10档)输入阻抗:
>40kΩ;隔离电压模块可同时连接测试4个不同电压信号,隔离电流模块可同时连接测试4个不同电流信号;有指示灯显示,低量程错误选择到高量程时会自动接入保护状态;输出接口采用标准BNC接头;输入接口采样标准4mm香蕉头插座。
2.实验桌
实验桌为铁质双层亚光密纹喷塑结构,桌面为防火、防水、耐磨高密度板,设有两个大抽屉、柜门,用于放置工具、存放挂件及资料等。
桌面用于安装电源控制屏并提供工作台面。
实验桌底部装有四个万向轮和四个固定调节机构。
3.不锈钢电机导轨、光码盘测速系统(1024增量式光电编码器)及数显转速表
电机与电机、电机与测功机之间连接的同心度不超过0.05mm。
转速表:
具有模拟量信号输出功能。
具有RS-485接口,支持Modbus-RTU协议。
4.直流并励电动机:
220V、1.1A、185W、1600r/min
5.三相鼠笼式异步电动机:
220V/△、0.5A、100W、1420r/min
6.校正直流测功机:
220V、2.0A、350W、1500r/min,既可作电动机又可作测功机,做电动机使用时,可作为发电机的原动机,也可用于拖动电动机完成四象限测试;作测功机使用时,由于电机经特殊设计,容量是被测电机的2~3倍,并经精密仪器校正,能很好的完成被测电机的加载输出转矩的测试
7.智能直流电压、电流表
直流数字电压表一只:
标准柜装48mm×96mm结构,塑壳封装,接口全部插拔式连接。
五位高可视度LED数码显示,测量范围0~500V(5V、50V、500V三档,PVC轻触键盘切换),输入阻抗10M,精度0.5级,并带有通讯接口及超量程报警输出功能。
直流数字电流表一只:
标准柜装48mm×96mm结构,塑壳封装,接口全部插拔式连接。
五位高可视度LED数码显示,测量范围0~5A(50mA、500mA、5A三档,PVC轻触键盘切换),输入阻抗为0.25Ω,精度0.5级,并带有通讯接口及超量程报警输出功能。
直流数字电流表一只:
标准柜装48mm×96mm结构,塑壳封装,接口全部插拔式连接。
五位高可视度LED数码显示,测量范围0~5A(50mA、500mA、5A三档,PVC轻触键盘切换),输入阻抗为0.25Ω,精度0.5级,并带有通讯接口及超量程报警输出功能。
8.智能交流电流表
交流数字电流表三只:
标准柜装48mm×96mm结构,塑壳封装,接口全部插拔式连接。
五位高可视度LED数码显示,测量范围0~5A(50mA、500mA、5A三档,PVC轻触键盘切换),输入阻抗为0Ω,精度0.5级,并带有通讯接口及超量程报警输出功能。
9.智能交流电压表
交流数字电压表三只:
标准柜装48mm×96mm结构,塑壳封装,接口全部插拔式连接。
五位高可视度LED数码显示,测量范围0~500V(5V、50V、500V三档,PVC轻触键盘切换),输入阻抗1M,精度0.5级,并带有通讯接口及超量程报警输出功能。
10.多功能电力仪表
★标准柜装结构,塑壳封装,接口全部插拔式连接。
双量程输出(0~15V/0~3A或0~9V/0~5A),带输出电压Sense反馈,具备DVM(数字电压表)功能,具有脉冲电流测量和长时间平均测量功能,高回读分辨率:
1mV,0.1mA(5A大电流量程),0.1uA(5mA小电流量程),电压编程分辨率最高可达2.5mV,低纹波、低噪音:
1mVRms,8mVpp,软件校正,具有锁键功能(Key-Lock)功能,免费提供LabView驱动和PC远程控制软件,可测量三相交流电压、电流、有功无功功率、有功无功电能、功率因数、频率等综合分析仪表,并带有通讯、越限保护等功能。
11.三相可调电阻器(三组90Ω×2/1.3A瓷盘电阻)
12.三相可调电阻器(三组900Ω×2/0.41A瓷盘电阻)
13.可调电阻器、电容器
提供90Ω×2/1.3A及900Ω×2/0.41A瓷盘电阻各一组,1µF/450V、2µF/450V、35µF/450V、4µF/450V电力电容各1只,10kΩ/8W、20kΩ/8W功率电阻各1只。
14.波形测试及开关板
由变压器的波形测试部分和两个三刀三位开关、一个双刀双掷开关组成。
15.实验连接线及配件
采用护套结构手枪插连接线(不存在任何触电的可能),里面采用无氧铜抽丝而成头发丝般细的多股线,达到超软目的,外包丁晴聚氯乙烯绝缘层,插头采用实芯铜质件外套铍轻铜弹片。
16.欧式导线架
装置配有欧式导线架,用于悬挂和放置实验专用连接导线,外形尺寸约530mm×430mm×1200mm,有五个万向轮。
三、装置的安全保护体系
1.三相四线制(或三相五线制)电源输入后经隔离输出(浮地设计),总电源由三相钥匙开关控制,设有三相带灯熔断器作为断相指示。
2.控制屏电源由接触器通过起、停按钮进行控制。
3.屏上装有两套电压型漏电保护装置,控制屏内或强电输出若有漏电现象,即告警并切断总电源,确保实验进程安全。
4.屏上装有一套电流型漏电保护器,控制屏若有漏电现象,漏电流超过一定值时,即切断电源。
5.屏上三相调压器原、副边各设有一套过流保护装置。
调压器短路或所带负载太大,电流超过设定值,系统即告警并切断总电源。
6.设有定时器兼报警记录仪(服务管理器),对违章使用的次数进行记录。
7.各种电源及各种仪表均有可靠的保护功能。
8.实验连接线安全、可靠、防触电。
四、实验项目
开设以下实验,提供实验指导书:
1.直流电机实验
(1)认识实验
(2)直流并励电动机
2.异步电机实验
(1)三相鼠笼异步电动机的工作特性
(2)三相异步电动机的起动
(3)三相鼠笼异步电动机的不对称运行
3.电动机机械特性的测定
(1)直流他励电动机在各种运转状态下的机械特性
(2)三相异步电机M-S曲线的测绘
6
102
工业用传感器综合实验台
一、主控台
提供高稳定的±15V、±5V、0~+24V可调、±2V~±10V可调直流稳压线性电源,0~20mA可调恒流源;主机箱面板上应装有电压、电流、频率、转速显示表,备有交流220V二孔、三孔插座。
二、配置
(1)直线光栅式传感器:
分辨率0.1u。
(2)绝对值式光电编码器:
精度0.1度。
(3)旋转变压器:
相位控制范围:
0~180°;频率控制范围:
10~10k;幅度控制范围:
1~5v;精度10′。
(4)测速发电机:
量程0~5000转/分;多功能测速、涡流式输出。
(5)陀螺仪:
三轴检测,灵敏度:
10′。
(6)电子罗盘:
运动姿态、角度检测。
(7)电流传感器
(8)光纤式光电传感器:
功能性光纤检测,光通量噪声小于0.1db。
(9)超声波测距传感器
(10)智能仪表在同一块仪表上数字显示光栅式传感器、光电编码器、旋转变压器、测速发电机、电流传感器、超声波传感器的数据。
★(11)数据采集系统。
通过数据采集卡,在电脑上使用采集软件进行上述传感器数据采集和显示。
三、实验项目
1.直线光栅位移检测实验
2.绝对值式光电编码器角度检测实验
3.旋转变压器角测量与激励信号调理实验
4.测速电机与编码器,旋转变压器测量综合特性实验
5.测速发电机电流传感器检测实验
6.光纤式光电传感器测速实验
7.超声波位移检测实验
8.陀螺仪振动检测
9.电子罗盘方位角度检测实验
10.智能仪表测试实验
6
▲103
双臂协作机器人(进口)
一、主要配置
双臂协作机器人由2个六自由度机器人组成,包括相应的控制系统和人际交互装置,以及1个自适应电动手爪,1个3D视觉相机。
二、主要技术参数
1.六自由度机器人
(1)重复精度:
≤±0.1mm
★
(2)有效负载:
5KG
(3)重量(含电缆):
≤18.4KG
(4)有效工作半径:
≥850mm
(5)自由度:
≥6个旋转关节
(6)工具端速度:
≥1m/s
(7)防护等级:
≥IP54
(8)工具中的输入/输出电源:
在工具中为12V/24V600mA
(9)材料:
铝、PP塑料
(10)温度范围:
0~50°
(11)扩展模块:
基于嵌入式控制器,集成低功耗CAN-bus、工业标准蓝牙Soc、高性能9轴惯性测量单元;
(12)编程:
12英寸触摸屏上的Polyscope图形用户界面,支持机器人操作系统(ROS),可进行二次开发和研究应用
(13)提供包含基于Web的在线仿真平台来运行ROS所需的开发环境的在线教程,教程内容包含运动规划、深度学习、感知、机器视觉
(14)提供机械臂视觉抓取开发教程,内容包括:
使用深度相机,利用开源的跨平台计算机视觉库对物体进行识别,通过对机械臂与夹持器组合的运动规划,实现物体的视觉抓取
2.自适应电动手爪
(1)抓取范围:
≥85mm
(2)抓取力:
≥20N,≤235N(+/-15%)
★(3)最大推荐载荷:
≥5KG
(4)手指合拢速度:
≥20mm/s,≤150mm/s
(5)平行抓取重复定位精度:
≤0.05mm
(6)重量:
≤850g
3.3D视觉相机
(1)操作范围:
≥0.2m~10m
(2)深度分辨率和帧速率:
≥1920X1080@30FPS
(3)视野深度:
≥91.2°X65.5°X100.6°
(4)传感器尺寸:
≤90mmx25mmx25mm
(5)系统接口类型USB3.0
★(6)软件:
支持机器人操作系统(ROS)
三、实验项目
开设以下实验,提供实验指导书(含程序):
(1)机器人人机交互实验
(2)机器人自动抓取实验
(3)双臂机器人协作实验
(4)机器人视觉抓取实验
1
▲104
AGV小车
一、主要配置
AGV小车是一款四轮独立驱动和转向移动机器人,具有全方位移动功能,进行分层机械设计,由四轮移动底盘层、控制系统层和负载层组成。
负载层使用物料传输辊,能够用于自主移动搬运作业任务。
安装有视觉导航传感器和安全避障传感器,具有触摸屏、遥控器等人机交互装置。
二、主要技术参数
★1.全方位移动功能:
移动底盘可以全方位移动,包括直行、侧行、斜行和原地转向等,使用直流伺服电机和驱动器,经谐波减速器减速。
★2.车轮:
采用5~8寸橡胶轮,车轮装置采用模块化设计,具有独立驱动和转向功能,具有垂直减振功能(车轮之间纵向、横向距离保持固定值)。
3.驱动和转向伺服电机
(1)额定功率:
≥150W
(2)额定扭矩:
≥150mNm,额定转速:
≥6500rpm
(3)重量:
≤500g
4.电机驱动器
(1)控制输入信号:
电压、脉冲
(2)编码器信号:
支持PNP集电极开路输入、差分编码器输入信号,并能够将输入的编码器信号经驱动器采集后输出至控制器。
(3)控制:
具有位置控制、速度控制功能,可以进行PID参数设置和调整等。
5.车载电池:
使用48V锂电池供电,容量:
≥20Ah
6.车载传感器
(1)视觉传感器:
提供彩色图像、景深图像信息。
(2)超声波传感器:
测距范围4m左右,误差≤5mm,采用模拟量信号输出,数目:
≥4。
7.视觉导航精度:
使用视觉传感器进行车道线检测时,位置偏差≤±2cm,角度偏差≤±1°。
8.车载主控计算机
(1)CPU:
Inteli7双核处理器(≥1.7GHz)
(2)内存:
≥8GB
(3)千兆网口数目:
≥4
(4)工作电压:
12~24V直流
(5)功耗:
≤30W
9.底层控制器:
每个车轮使用独立的嵌入式控制器。
10.控制软件:
支持机器人操作系统(ROS)。
11.几何尺寸:
约为700*500*600mm(长*宽*高)。
12.负载:
≥50kg。
三、实验项目
开设以下实验,提供实验指导书(含底层控制器程序和主控计算机程序):
(1)移动机器人运动控制实验
(2)移动机器人视觉导航实验
(3)移动机器人远程调度实验
(4)移动机器人定位与导航实验
1
105
机器人用网络传感器实验台
一、主要配置
机器人用网络传感器实验台包括视觉传感器1件、三维激光测距传感器1件、六维腕力传感器1件、陀螺仪1件,以及相应的数据采集软件。
二、主要技术参数
1.视觉传感器
(1)检测功能:
图像分辨率可以为1280*960,能够进行实时3D数据转换,每秒产生不少于100万个3D点,具有镜头畸变和相机位置偏差自动校正功能。
(2)软件功能:
具有实时深度图像处理功能。
2.三维激光测距传感器
(1)测量距离:
最远达100m
(2)精确度:
±3cm
视场角:
360°(水平范围,角度分辨率2°),30°(垂直范围角度分辨率0.1°~0.4°)
(3)旋转速率:
5~20Hz
(4)激光安全等级:
1级(人眼安全)
(5)激光波长:
903nm
(6)功耗:
8W
(7)工作电压:
9~32V直流电
(8)重量:
≤900g
(9)防护标准:
IP67
(10)工作温度:
-10°~+60°C
(11)输出:
高达30万点/秒
(12)通信方式:
以太网连接,速率100Mbps。
3.六维腕力传感器
(1)测量对象:
测量6个方向的力和力矩(Fx,Fy,Fz,Tx,Ty,Tz)的平均值和脉动值。
(2)量程:
Fxy:
大于等于130N,Fz:
大于等于400N,Txyz:
大于等于10Nm。
(3)分辨率:
Fxy:
小于等于1/40N,Fz:
小于等于1/20N,Txy:
小于等于1/800Nm,Tz:
小于等于1/800Nm。
(4)单轴抗过载力:
Fxy:
大于等于1200N,Fz:
大于等于4100N,Txy:
大于等于79Nm,Tz:
大于等于82Nm。
(5)传感器材质:
高强度航空铝,刚度要求:
Kx,Ky:
大于等于9.1×106Nm,Kz:
大于等于1.8×107Nm,KtxKty:
大于等于1.1×104Nm,Ktz:
大于等于1.6×104Nm。
(6)外形尺寸:
直径70~80mm,厚度30~35mm。
(7)重量:
小于等于254g。
(8)产品原理:
半导体硅应变原理。
(9)通信方式:
以太网连接。
4.陀螺仪
(1)陀螺仪分辨力:
0.01°/sec,量程:
≥±300°/sec,零点绝对误差:
≤±0.1°/sec。
(2)方位角精度:
0.1°,俯仰角、横滚角静态精度:
0.1°。
(3)加速度计分辨力:
0.01mg,量程:
≥±5g。
(4)采样频率:
≥50Hz。
三、实验项目
开设以下实验,提供实验资料:
(1)视觉传感器检测实验
(2)三维激光测距传感器检测实验
(3)六维腕力传感器检测实验
(4)陀螺仪检测实验
1
106
实验配套用台式电脑
台式品牌机,IntelI5-8500CPU、内存8GB、128G固态硬盘和1TB硬盘,Win10操作系统,21.5寸显示器,带有PCI插槽。
10
第2包:
机电液一体化实验教学设备
品目号
设备名称
主要技术参数及配置要求
台套数
▲201
运动控制实验台
一、主要配置
工业式PC控制器(IntelAtom-E3845CPU,4GB内存,60G固态硬盘,安装运动控制软件:
PLC/NC50+Windows10操作系统)1套、EtherCAT总线耦合器1个、16路数字量输入模块1个、16路数字量输出模块1个、4路模拟量输入模块1个、17寸电容式触摸显示器1台、伺服系统(伺服电机和驱动器)4套、键盘鼠标1套、双轴加速度传感器(模拟量输出)1件,实验架1台,实验桌1台。
二、主要技术参数
1.运动控制器
(1)输入电压:
220V交流电。
★
(2)通信方式:
EtherCAT总线
★(3)控制软件:
支持PLC、数控、VisualStudio编程。
2.伺服系统(伺服电机和驱动器):
支持EtherCAT总线
三、实验项目
开设以下实验:
(1)EtherCAT总线控制实验
(2)多电机协调控制实验
(3)传感器数据采集与处理实验
6
202
PLC控制实验箱
一、功能要求
PLC(可编程序控制器)控制实验箱用于开展PLC控制技术实验的设备,主要实现可编程逻辑控制、常用电机控制、传感器信号采集等功能,便于进行电路设计和控制程序设计,能够使用网络通信和其他控制系统互联。
二、主要配置
PLC主机1件、开关电源1套(220V交流转24V直流,额定电流不小于4安培;220V交流转5V直流,额定电流不小于3安培)、7寸触摸屏1件(具有网络通信功能)、步进电机及驱动器1套、24V直流电机1个、24V光电编码器1件、双轴加速度传感器(模拟量输出)1件、接线端子30个、熔断器1个、24V继电器5个、按钮(包括紧停)5个、信号灯5个、网线1件、面包板1件、实验箱1件、面板1件、底板1件。
三、主要技术参数
(1)输入电压:
220V交流电,工作电压:
24V、5V。
★
(2)PLC主机(CPU)采用24V直流供电、24V直流输入、24V直流输出,具有14路数字量输入,10路数字量输出,2路模拟量输入,每个布尔指令执行时间不慢于0.08微秒,高速计数器不少于6个,脉冲输出可以组态不少于4个脉冲发生器,具有网络通信功能,功耗不超过12W,可最多扩展8个信号模块,支持增加1个信号板而不增大安装空间,支持OPC通信方式。
四、实验项目
开设以下实验,提供实验指导书(含程序):
(1)直流电机正反转控制实验
(2)步进电机控制实验
(3)编码器信号检测实验
(4)加速度传感器数据采集实验
(5)PLC控制系统设计实验
25
▲203
基于51单片机的机电一体化实验教学平台(数控车床型)
一、主要配置
数控车床主机1台、基于51单片机的开放式展板型数控系统1套、伺服电机驱动装置2套、自动转位刀架1套、交流变频调速装置1套、气动卡盘1套、螺纹编码器1套、51单片机仿真开发装置1套(含软件)。
二、主要技术参数
(1)车床参数:
床身为整体铸铁件;床身上最大回转直径不小于200mm;最大加工长度不小于300mm;最高转速不小于3000rpm;刀架工位数4;X向脉冲当量0.005mm/步;Z向脉冲当量0.01mm/步;可以车削公制、英制、模数和端面螺纹,最大导程24mm。
★
(2)数控系统采用DS80C320单片机作CPU,键盘与显示采用8279+2051管理,其中显示采用三排LED管(每排为1个16段LED+7个8段LED),扩展HK1225作为SRAM,扩展W27E512作为EEPROM,扩展8255A作为I/O口,内含D/A转换器DAC0832输出0~10V直流电压,内含A/D转换器ADC0809采集8路模拟量,含有RS232C接口和USB接口,并可扩展SED1335芯片控制320×240点阵的LCD显示屏。
(3)数控系统的所有硬件均布置在一块立式展板上,展板底部为一写字台式工作台;电路采用展板式的模块化结构,自由选择,组合连接,可实现不同功能;所有PCB板上重要、易损的IC芯片均采用DIP封装,且插在SOCKET上。
(4)数控系统含有系统完整的监控、管理和控制功能,具有独立的标准化的操作面板,使用者可以从面板将ISO数控代码键入系统内部。
(5)数控系统的底层程序全部采用8051汇编语言(不是C语言)编写,所有源程序带有中文注释,并对使用者完全开放,包括人-机交互程序和G/S/T/M等ISO代码程序。
(6)数控系统底层程序里的任一模块可随意删除,并能够嵌入使用者编制的汇编源程序代码模块。
三、实验项目
开设以下实验,提供开放性实验指导书(含汇编源程序):
(1)数控系统人-机接口(键盘与显示)实验
(2)数控系统存储器和I/O扩展实验
(3)数控系统D/A和A/D转换实验
(4)三相交流异步电机的有级/无级变速实验
(5)数控车床的两坐标数字积分法直线插补原理实验
(6)数控车床的两坐标逐点比较法圆弧插补原理实验
(7)数控车床的直螺纹车削原理(单步追踪法)实验
(8)数控车床的锥螺纹车削原理(单步追踪法)实验
(9)伺服电机的加减速运动控制实验
(10)自动回转刀架的结构设计与电气控制实验
2
▲204
基于51单片机的机电一体化实验教学平台(数控X-Y工作台型)
一、主要配置
X-Y数控工作台1套(带金属基座)、基于51单片机


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 电机 控制 传感器 机器人 实验教学 设备
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 #2机组现场施工用电布置措施.docx
#2机组现场施工用电布置措施.docx
-
《个人贵金属质押借款合同》兴业银行.docx
-
《科学发展观和小康社会的经济建设》复习导学案.docx
-
《我和祖父的园子》第一课时教案两篇word.docx
-
《质量》教学案例与设计.docx
-
2惠农小册子.docx
-
7A版个人与团队模拟考试题及答案.docx
-
10篇新部编四年级下册语文课内外阅读理解专项练习题及答案.docx
-
16初四物理热和能知识点总结精讲.docx
-
20XX社会语言经典语录流行风暴.docx
-
48篇教学案例分析报告题.docx
-
《电子工厂安全管理制度汇总》.docx
-
《机械制造课程设计》指导.docx
-
《钱学森》教案第二课时.docx
-
《边城》读后感5篇.docx
-
《固定式压力容器安全技术监察规程》.docx
-
《论雷峰塔的倒掉》.docx
-
《手术台就是阵地》教学设计三年级语文下册.docx
-
《夏洛的网》课外阅读教学设计.docx
-
《自己的花是让别人看的》教案.docx
-
3C检查表090429.docx
-
7客运专线CRTSⅡ型板式无砟轨道施工工法.docx
-
《笔算除法》课时教案设计.docx
-
11#楼高大模板支撑体系专项方案.docx
-
17科学分析经济形势.docx
-
《电流和电路》易错题精讲综合检测题与答案.docx
-
《会计信息系统》习题含答案.docx
-
《汽车电器设备与维修》发电机分教考分离试题及标准答案.docx
-
《四川省排污许可证管理暂行办法》.docx
-
《新编实用英语》教案第一册Unit.docx
-
0母版锅炉值班员计算题WORD版.docx
-
3年级下册英语单词记忆人教版.docx
-
参观派出所心得体会docWord文档下载推荐.docx
-
潮州市华侨中学高三第一次综合测试文科综合Word文档格式.docx
-
初二作业本语文下册答案Word下载.docx
-
初二下学期物理期末考试模拟试题北师大版精品教育docWord文件下载.docx
-
残疾人培训方案Word文档格式.docx
-
车辆挂靠协议书范本文档格式.docx
-
初三化学第一单元走进化学世界测试题Word格式文档下载.docx
-
初中学校教学工作总结范文Word格式.docx
-
初级职称考试经济法不定项选择题专项练习答案doc文档格式.docx
-
初中化学知识要点总结最详细总汇Word文件下载.docx
-
财政投资评审管理办法最新范本模板Word文档格式.docx
-
创新创业课 大学生创业基础李肖明期末考试答案Word文档格式.docx
-
初三化学上册期末考试题语文Word格式.docx
-
成林村还迁安置房Word文档下载推荐.docx
-
初三上学期学生简短评语Word格式文档下载.docx
-
创业计划书交友俱乐部Word下载.docx
-
程序设计编码规范Word文档下载推荐.docx
-
初二数学勾股定理讲义经典Word文件下载.docx
-
昌龙滨江项目营销推广定位策略沟通文档格式.docx
