 振动力学考题集.docx
振动力学考题集.docx
- 文档编号:28148253
- 上传时间:2023-07-08
- 格式:DOCX
- 页数:14
- 大小:371.12KB
振动力学考题集.docx
《振动力学考题集.docx》由会员分享,可在线阅读,更多相关《振动力学考题集.docx(14页珍藏版)》请在冰豆网上搜索。
振动力学考题集
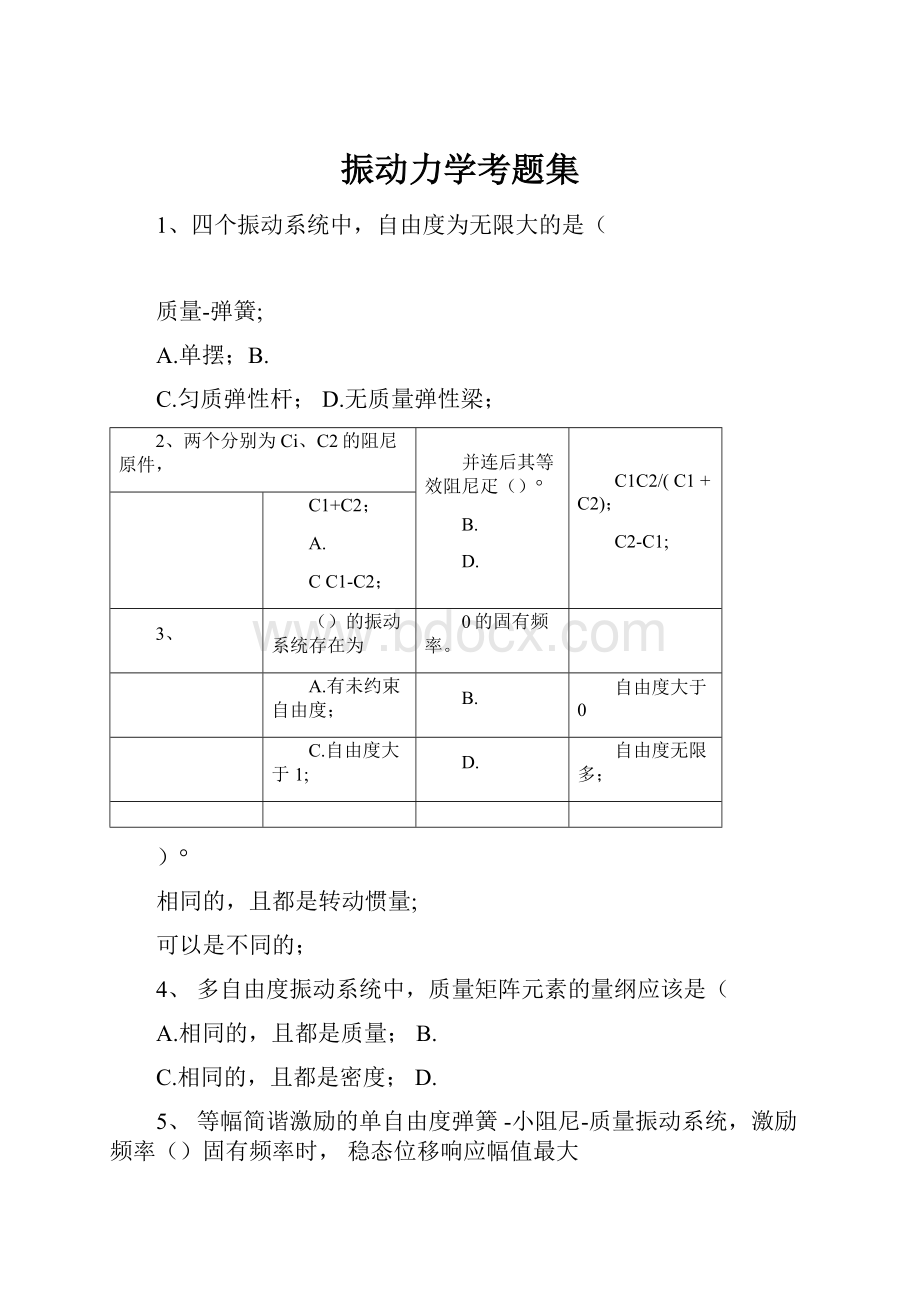
1、四个振动系统中,自由度为无限大的是(
质量-弹簧;
A.单摆;B.
C.匀质弹性杆;D.无质量弹性梁;
2、两个分别为Ci、C2的阻尼原件,
并连后其等效阻尼疋()°
B.
D.
C1C2/(C1+C2);
C2-C1;
C1+C2;
A.
CC1-C2;
3、
()的振动系统存在为
0的固有频率。
A.有未约束自由度;
B.
自由度大于0
C.自由度大于1;
D.
自由度无限多;
)°
相同的,且都是转动惯量;
可以是不同的;
4、多自由度振动系统中,质量矩阵元素的量纲应该是(
A.相同的,且都是质量;B.
C.相同的,且都是密度;D.
5、等幅简谐激励的单自由度弹簧-小阻尼-质量振动系统,激励频率()固有频率时,稳态位移响应幅值最大
A.等于;B.稍大于;
C.稍小于;D.为0;
6、自由度为n的振动系统,且没有重合的固有频率,其固有频率的数目(A)°
A.为n;B.为1;
C.大于n;D.小于n;
7、
无阻尼振动系统两个不同的振型
u(r)和u(s),u(r)TMu⑸的值定()
A.大于0;
B.
等于0;
C.小于0;
D.
不能确定;
8、
无阻尼振动系统的某振型
u(r)
u(r)TKu⑴的值一定()°
A.大于0;
B.
等于0;
C.小于0;
D.
不能确定;
9、如果简谐激励力作用在无约束振动系统的某集中质量上,当激励频率为无限大时,
该集中质量的稳态位移响应一
定()°
A.大于0;
B.等于0;
C.为无穷大;
D.
为一常数值;
10、相邻固有频率之间的间隔呈近似无限等差数列的振动系统是()
A.杆的纵向振动;B.弦的横向振动;
C.一般无限多自由度系统;D.梁的横向振动;
11、两个刚度分别为k1、k2串连的弹簧,其等效刚度是()
13、无阻尼振动系统的某振型u
(r),
A.大于0;B.
u(r)TMu⑴的值一定())
等于0;
不能确定;
14、如果简谐激励力作用在无约束振动系统的某集中质量上,当激励频率为
该集中质量的稳态位移响应一定()。
A.大于0;B.等于0;
C.为无穷大;D.为一常数值;
0时,
15、如果简谐激励力作用在振动系统的某集中质量上,当激励频率无穷大时,该集中质量的位移响应幅值一定()。
A.大于0;
C.也为无穷大;
B.等于0;
D.为一常数值;
如图所示作微幅振动的系统,长度l=1m质量m=1kg的匀质刚杆AB,A端的弹簧刚度k=1N/m,B端的作用外力
F=sint,初始时刻系统水平平衡位置静止不动,请完成:
(1)以杆的转角0
为变量列出系统的运动方程;
(2)求出系统的固有频率;(3)求系统的运动解。
刚度k,阻尼c,B端的记录笔画出地震波形,系统水平位置是平衡位置,设系统随地震
起运动为u(t),请完成:
(1)以B点垂直位移为变量y列出系统的运动方程;
(2)求出系统的频率响应两数;
n=600r/min,衣物的偏心质量m=1kg,偏心距e=40cm。
请完成:
(1)以垂直位移为变量列出系统的运动方程;
(2)求出系统的频率响应函数;(3)求出系统振幅的数值
质量为m的重块处于无摩擦的水平面上,通过刚度为
k的弹簧与质量为M、
质杆相连。
请完成:
度矩阵。
1)列出系统的振动微分方程;
2)写出微小振动条件下的线性化微分
长度为I的匀
方程中的质量矩阵和刚
写出下图所示的质量-弹簧系统千锤方向振动方程的质量矩阵、刚度矩阵和阻尼矩阵
mi
写出下图所示的质量-刚杆-弹簧振动系统微幅振动方程的质量矩阵、刚度矩阵
图示为一无阻尼动力减震器动力学模型,其主系统的质量mi=、刚度ki=,附加的减震器质
量m2=、刚度k2=,外界振动引起的支承简谐激励u=Usinwt。
请完成:
(1)列出系统的运动微分方程;
(2)
求出系统的固有频率;(3)激励频率为多少时主系统mi无振动。
2
简述振动系统自由度的意义及振动系统自由度的分类。
简述振动系统的固有频率及其在振动分析中的意义。
简述矩阵迭代法的计算流程5章7-8
简述多自由度振动系统的振型及其在振动分析中的意义。
5章1-2
简述多自由度振动系统分析中振型正交性在振动分析中的作用。
5章3-4
简述线性振动系统和非线性振动系统的区别。
在第4章中我们讨论过多自由度系统主振型的正交性。
这种正交性是主坐标分析法的基础。
前面本章中曾提到弹
性体振动具有类似的特性。
从前几节的讨论中可以看到,一些简单
情形下的振型函数是三角函数,它们的正交性是比较清楚的;而在另一些情形下得到的振型
函数还包含有双曲函数,它们的正交性以及更一般情形下振型函数的正交性尚待进一步说明。
下面我们仅就梁的弯曲振动的振型函数论证其正交性。
因为在讨论正交性时,不必
涉及振型函数的具体形式,所以我们稍为放宽一些假设条件。
和前几节不冋,本节所考祭的
梁截面可以是变化的。
这时,梁单位长度的质量
以及截面刚度---都是的已知函
数,而不必为常数。
故梁的自由弯曲振动微分方程为
(5-60)
采用分离变量法,将■''■J表示为
(5-61)
将它代入方程(5-60)进行分离变量后,可得
(5-62)
*歇灯芬-/口肿(或
(5-63)
我们将从方程(5-63)出发进行讨论。
这时,与(5-23),(5-24),(5-25)
相对应的边界条件为
固支端:
(5-64)
铰支端:
自由端:
f=0或/
(5-65)
(5-66)
二.或二
现假设方程(5-63)在一定的边界条件下,对应于任意两个不同的特征值
的振型函数分别为与'■:
■:
',于是有
[贞(力,/?
)]、町厲兀)兀(心,0 (5-67) 砧心町⑵,0 (5-68) 对(5-67)式乘以"「宀: ,然后在W门上对二进行积分,得 “兀俐心二X血)国匕)爲I? ]卜兀3刃(小丁(端十jf因(方兀■饲町3心TJ仪”兀⑴兀仗禺 (5-69) 再将式(5-68)乘以-,然后在: m上对工'进行积分,得 =也(力[血匕)斗a)]-卜刃何耿歸町a)k =AjJ轨0)站(力无(对必 (5-70) 再对式(5-69)与式(5-70)相减,可得 (时-硝”;点或兀(x)兀(天M工 ={兀(现创>)片刖'-弓⑴贞(小7專)-工? 田心)x/3*召(R因⑶弓? 加 (5-71) 可以看到,如果以式(5-64)一(5-66)中任意两个式子组合成梁的边界条件,那么式(5-71)右端都将等于零。 所以,在这情形下,就有 (对7;)J少(7)兀QX個必.0 但前面已经假设-? 二,故有 「加力&⑴兀⑴心二山当2丿 (5-72) 正是在这一意义上,我们称振型函数 学上亦称以八门为权函数的加权正交,以区别于 通常意义下的正交性: 上宀门与关于质量密度门二正交。 数 常数时,「I'? 与・'所具有的 \兀(劝兀(舟次-X%单) 考虑到式(5-72),从式(5-69)或式(5-70)都可以看到,在上述边界条件下,有 (5-73) ''的正交性,实际上是振型函数的二阶导由此可见,梁弯曲振动振型函数这种关于刚度数所具有 的正交性。 当? '时,式(5-71)自然满足。 这时,可记下列积分为 J: 血诧何必兰蜂 (5 5-69)或式(5-70) -74) X■'称为第: 阶振型的广义质量,': 称为第』阶振型的广义刚度。 由式( 不难看到,有 当梁的端为弹性支承时,边界条件为 (I)=0 将它代入式(5-71)与式(5-69),可得 捷烦? 逅(耳巧(工逊三0,当GJ f11A}■(x)Ax+kXi二0.当心」 (5-75) 又当梁的[端具有附加质量时,边界条件为 [刃(如,? ]山? 将它代入式(5-71)与式(5-69),可得 J妝或兀(力兀(圖十泌険兀(0=0=当iI (5-76) 由此可见,在弹性支承端情形与附加质量端情形,与式(5-76)表示。 它们的振型函数的正交性分别由式 (5-75) 我们来证明,当? '-时,对应于几的惯性力与弹性力在「」'上所作的功为零 对应于 事实上,对应于上,梁微元? 第的惯性力厂为 ,梁在该微元处的速度为 故整个梁对应于匸.的惯性力在J.■上所作功的功率为 4-=」耍站八罕◎葺? 垃式讹住j当心」 : 的截面弯矩 0(3= 在弯曲振动中,关于弹性力的功,只需要考虑截面弯矩所作的功。 梁对应于 厂为 M⑴*恥)石丽 而对应于的截面转角微元二壬为 故整个梁对应于匸的弯矩在」-上所作的功为 %;J沁9冷呂? 号(对扭? 兀⑴弓1/=0.当详J 可见,由于振型函数的正交性,当「,时,主振动上不会激起主振动,换句话 说,振型函数的正交性反映了各阶主振动之间既不存在惯性耦合作用,也不存在弹性耦合作用。 上述讨论同样适用于有弹性支承端与附加质量端的情形。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 振动 力学 考题
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《贝的故事》教案4.docx
《贝的故事》教案4.docx
-
《对韵歌》优秀教案8.docx
-
《函数yAsinωx+φ+P图象》wwwnet.docx
-
《静夜思》教学设计.docx
-
《汽车底盘构造与维修》题库与考核标准.docx
-
《世说新语》复习资料.docx
-
《我的服装我做主》教案设计.docx
-
《在品味情感中成长》教学片断设计.docx
-
11造价员《建设工程造价管理基础知识》精讲教程文件.docx
-
《不会叫的狗》教案 人教部编版1.docx
-
《操作系统》二学期A卷及答案.docx
-
《傅雷家书》名著阅读笔记.docx
-
《反不正当竞争法》下互联网平台封禁行为考辨以消费者用户合法权益保护为中心.docx
-
《化工原理》第六章蒸发.docx
-
《蓝海战略》概要11页.docx
-
《人生》读书心得.docx
-
《荷叶圆圆》公开课教案优秀教学设计26.docx
-
《科技出行研究报告》智能网联与新能源将变革未来汽车出行.docx
-
《272 向量的应用举例》导学案1.docx
-
《秋天》评课稿.docx
-
《电算化》第二章会计电算化的工作环境章节练习.docx
-
《室外给排水管道》施组.docx
-
《广东省建筑与装饰工程综合定额》计算规则.docx
-
《我多想去看看》教学.docx
-
《直通车车手基础认证》 考试答案 70题之欧阳育创编.docx
-
7天销量翻10倍皇冠卖家教您玩转最精准流量.docx
-
9 阿长和山海经.docx
-
《比例尺》教案.docx
-
《菜根谭》注译四闲适篇.docx
-
《福尔摩斯探案集》读后感15篇.docx
-
《红对勾》古代诗歌选择题答案补充.docx
-
《课堂密码》读后感及心得精选多篇.docx
-
计算机等级一级MS Office练习试题Word格式文档下载.docx
-
届高三英语好教育云平台份内部特供卷一附解析Word格式.docx
-
广东省电力系统继电保护反事故措施汇编 试行版资料Word文档下载推荐.docx
-
广东电视台现代产业基础知识系列丛书知识竞赛题组织部Word格式.docx
-
广元市小升初入学考试模拟考试试题与答案汇总五份Word文档格式.docx
-
华中农业大学食品化学真题分解Word格式文档下载.docx
-
管理制度韶关市住房公积金管理中心乐昌办事处办事制度Word文档格式.docx
-
关于个体工商户积极参与全民创业的情况汇报docWord文件下载.docx
-
国防教育演讲稿2篇多篇Word格式文档下载.docx
-
高中语文文学常识汇编Word文件下载.docx
-
关于学校合作协议书范文10篇Word文档格式.docx
-
国家基础地理信息数据使用许可管理规定完全版文档格式.docx
-
黑龙江工业学院大学生职业生涯规划书Word文档下载推荐.docx
-
机电设备报废申请书Word格式.docx
-
混合动力电动汽车的整车能源分配优化研究16页Word文件下载.docx
-
河北省公务员面试真题及答案解析分析Word下载.docx
-
行政助理工作计划范文4篇Word文档格式.docx
-
基本统计图表的制作Word文件下载.docx
-
管理评审全套报告Word格式文档下载.docx
