 可编程控制器技术实验指导书.docx
可编程控制器技术实验指导书.docx
- 文档编号:28074800
- 上传时间:2023-07-08
- 格式:DOCX
- 页数:34
- 大小:575.58KB
可编程控制器技术实验指导书.docx
《可编程控制器技术实验指导书.docx》由会员分享,可在线阅读,更多相关《可编程控制器技术实验指导书.docx(34页珍藏版)》请在冰豆网上搜索。
可编程控制器技术实验指导书
可编程控制器技术实验指导书
实验一电动机的点动及连续运行控制
一、实验目的
用PLC完成对电动机的点动及连续运行控制
二、实验内容
1.控制要求
(a)点动控制:
当按下SB1时,输入继电器X0得电,其常开触点闭合,因为异步电动机未过热,热继电器常开触点不闭合,输入继电器X2不接通,其常闭触点保持闭合,则此时输出继电器Y0接通,进而接触器KM得电,其主触点接通电动机的电源,则电动机起动运行。
当松开按钮SB1时,X0失电,其触点断开,Y0失电,接触点KM断电,电动机停止转动,即本梯形图可实现点动控制功能。
(b)连续运行:
当按SB1被按下时X0接通,Y0置1,这时电动机连续运行。
需要停车时,按下停车按钮SB2,串联于Y0线圈回路中的X1的常闭触点断开,Y0置1,电机失电停车。
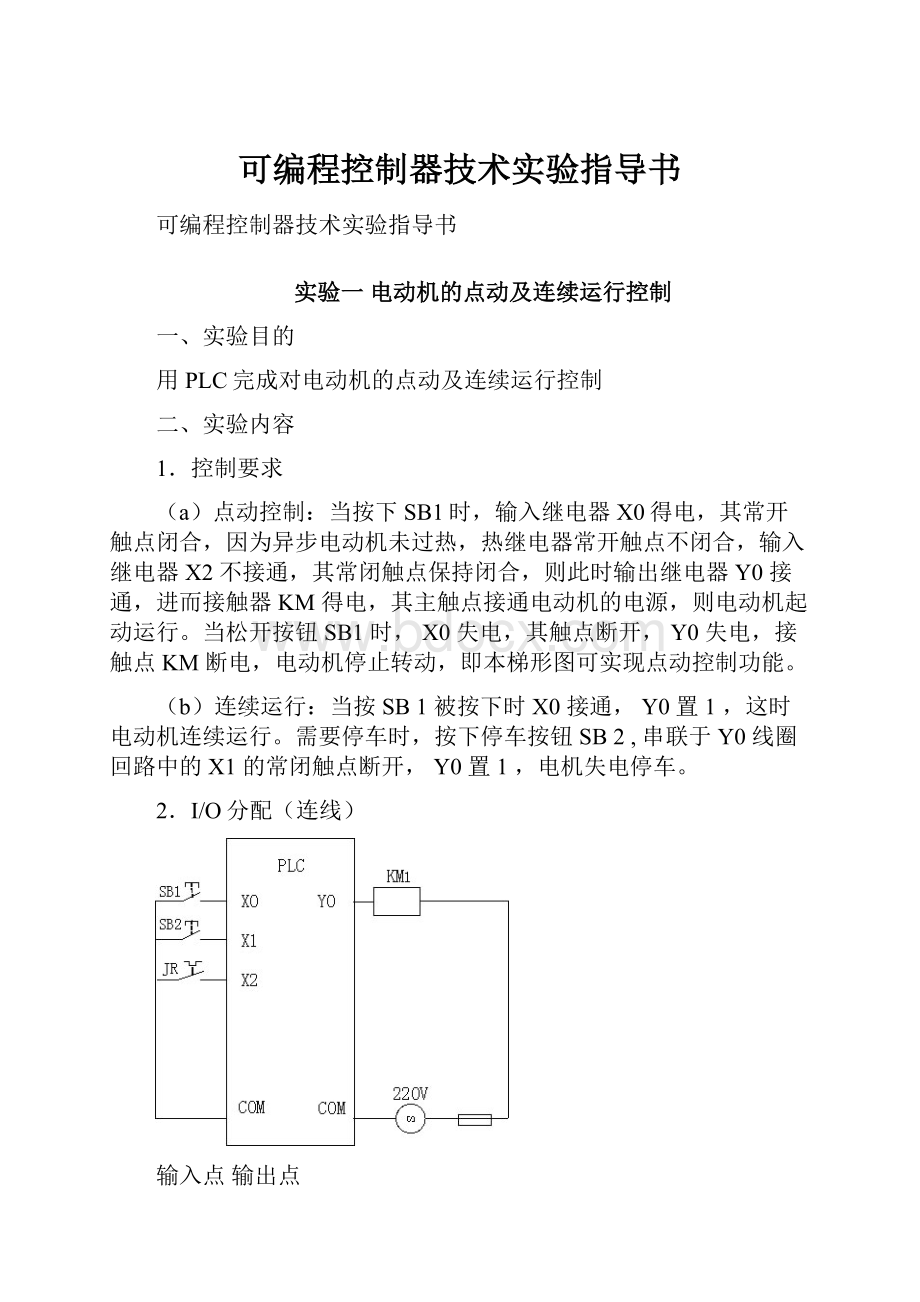
2.I/O分配(连线)
输入点输出点
SB1:
X0KM1:
Y0
SB2:
X1
JR:
X2
3.按图所示的梯形图输入程序。
4.调试并运行程序。
图1-1异步电动机控制线路示意图
三、电机点动及连续运动控制语句表
1.点动控制语句表
2.连续运行语句表
四、电机点动及连续运动控制梯形图
图1-2点动控制梯形图
图1-3连续运行控制梯形图
实验二轧钢机的模拟控制
一、实验目的
用PLC构成轧钢机控制系统
二、实验内容
1.控制要求
当起动按钮按下,电动机M1、M2运行,按S1表示检测到物体,电动机M3正转,即M3亮。
再按S2,电动机M3反转,即M3R亮,同时电磁阀Y1动作。
再按S1,电动机M3正转,重复经过三次循环,再按S2时,则停机一段时间(3s),取出成品后,继续运行,不需要按起动。
当按下停止按钮时,必须按起动后方可运行。
必须注意不先按S1,而按S2将不会有动作。
2.I/O分配(连线)
输入输出
起动按钮(SB1):
X0M1:
Y0M3F:
Y2
停止按钮(SB2):
X3M2:
Y1M3F:
Y3
S1按钮:
X1Y1:
Y4
S2按钮:
X2
3.按图所示的梯形图输入程序。
4.调试并运行程序。
图2-1轧钢机控制示意图
三、轧钢机控制语句表
0
LD
X000
12
LD
X001
24
AND
X003
36
SP
K30
1
OR
T1
13
OR
Y002
25
ANI
X001
37
2
OR
T0
14
AND
X003
26
AND
M0
38
FNC
40
3
AND
X003
15
ANI
X002
27
AND
M1
39
Y000
4
OUT
M0
16
AND
M0
28
OUT
Y003
40
Y004
5
LD
X000
17
OUT
Y002
29
OUT
Y004
41
6
OR
Y000
18
SET
M1
30
LD
Y003
42
7
OR
T1
19
LDI
X003
31
OUT
C1
43
LD
T1
8
AND
X003
20
OR
C1
32
SP
K4
44
RST
C1
9
AND
M0
21
RST
M1
33
45
10
OUT
Y000
22
LD
X002
34
LD
C1
46
END
11
OUT
Y001
23
OR
Y003
35
OUT
T1
47
四、轧钢机控制梯形图
图2-2轧钢机控制梯形图
实验三四节传送带的模拟控制
一、实验目的
用PLC构成四节传送带控制系统
二、实验内容
1、控制要求
起动后,先起动最末的皮带机,1s后再依次起动其它的皮带机;停止时,先停止最初的皮带机,1s后再依次停止其它的皮带机;当某条皮带机发生故障时,该机及前面的应立即停止,以后的每隔1s顺序停止;当某条皮带机有重物时,该皮带机前面的应立即停止,该皮带机运行1s后停止,再1s后接下去的一台停止,依此类推。
2、I/O分配(连线)
输入输出
起动按钮(SB1或SR1):
X0M1:
Y1
停止按钮(SB2或SR2):
X5M2:
Y2
负载或故障A:
X1M3:
Y3
负载或故障B:
X2M4:
Y4
负载或故障C:
X3
负载或故障D:
X4
3、按图所示的梯形图输入程序。
4、调试并运行程序。
图3-1四节传送带控制示意图
三、四节传送带故障设置控制语句表
0
LD
X000
30
OR
M4
60
OUT
T6
90
RST
Y003
1
OR
M1
31
ANI
X000
61
SP
K10
91
OUT
M11
2
AND
X005
32
RST
Y001
62
92
LD
M11
3
ANI
X001
33
OUT
M4
63
LD
T6
93
OUT
T10
4
ANI
X002
34
LD
M4
64
RST
Y002
94
SP
K10
5
ANI
X003
35
OUT
T3
65
OUT
M8
95
6
ANI
X004
36
SP
K10
66
LD
M8
96
LD
T10
7
SET
Y004
37
67
OUT
T7
97
RST
Y004
8
OUT
M1
38
LD
T3
68
SP
K10
98
LD
X003
9
LD
M1
39
RST
Y002
69
99
OR
M12
10
OUT
T0
40
OUT
M5
70
LD
T7
100
ANI
X000
11
SP
K10
41
LD
M5
71
RST
Y003
101
RST
Y001
12
42
OUT
T4
72
OUT
M9
102
RST
Y002
13
LD
T0
43
SP
K10
73
LD
M9
103
RST
Y003
14
SET
Y003
44
74
OUT
T8
104
OUT
M12
15
OUT
M2
45
LD
T4
75
SP
K10
105
LD
M12
16
LD
M2
46
RST
Y003
76
106
OUT
T11
17
OUT
T1
47
OUT
M6
77
LD
T8
107
SP
K10
18
SP
K10
48
LD
M6
78
RST
Y004
108
19
49
OUT
T5
79
LD
X002
109
LD
T11
20
LD
T1
50
SP
K10
80
OR
M10
110
RST
Y004
21
SET
Y002
51
81
ANI
X000
111
LD
X004
22
OUT
M3
52
LD
T5
82
RST
Y001
112
OR
M13
23
LD
M3
53
RST
Y004
83
RST
Y002
113
ANI
X000
24
OUT
T2
54
LD
X001
84
OUT
M10
114
RST
Y001
25
SP
K10
55
OR
M7
85
LD
M10
115
RST
Y002
26
56
ANI
X000
86
OUT
T9
116
RST
Y003
27
LD
T2
57
RST
Y001
87
SP
K10
117
RST
Y004
28
SET
Y001
58
OUT
M7
88
118
OUT
M13
29
LDI
X005
59
LD
M7
89
LD
T9
119
END
四、四节传送带故障设置控制梯形图
图3-2四节传送带故障设置控制梯形图
五、四节传送带载重设置控制语句表
0
LD
X000
36
SP
K10
72
OUT
T8
108
RST
Y004
1
OR
M1
37
73
SP
K10
109
LD
X003
2
AND
X005
38
LD
T3
74
110
OR
M23
3
ANI
X001
39
RST
Y002
75
LD
T8
111
ANI
X000
4
ANI
X002
40
OUT
M5
76
RST
Y003
112
RST
Y001
5
ANI
X003
41
LD
M5
77
OUT
M9
113
RST
Y002
6
ANI
X004
42
OUT
T4
78
LD
M9
114
OUT
M23
7
SET
Y004
43
SP
K10
79
OUT
T9
115
LD
M23
8
OUT
M1
44
80
SP
K10
116
OUT
T13
9
LD
M1
45
LD
T4
81
117
SP
K10
10
OUT
T0
46
RST
Y003
82
LD
T9
118
11
SP
K10
47
OUT
M6
83
RST
Y004
119
LD
T13
12
48
LD
M6
84
LD
X002
120
RST
Y003
13
LD
T0
49
OUT
T5
85
OR
M22
121
OUT
M14
14
SET
Y003
50
SP
K10
86
ANI
X000
122
LD
M14
15
OUT
M2
51
87
RST
Y001
123
OUT
T14
16
LD
M2
52
LD
T5
88
OUT
M22
124
SP
K10
17
OUT
T1
53
RST
Y004
89
LD
M22
125
18
SP
K10
54
LD
X001
90
OUT
T10
126
LD
T14
19
55
OR
M21
91
SP
K10
127
RST
Y004
20
LD
T1
56
ANI
X000
92
128
LD
X004
21
SET
Y002
57
OUT
T6
93
LD
T10
129
OR
M24
22
OUT
M3
58
SP
K10
94
RST
Y002
130
ANI
X000
23
LD
M3
59
95
OUT
M11
131
RST
Y001
24
OUT
T2
60
OUT
M21
96
LD
M11
132
RST
Y002
25
SP
K10
61
LD
T6
97
OUT
T11
133
RST
Y003
26
62
RST
Y001
98
SP
K10
134
OUT
M24
27
LD
T2
63
OUT
M7
99
135
LD
M24
28
SET
Y001
64
LD
M7
100
LD
T11
136
OUT
T15
29
LDI
X005
65
OUT
T7
101
RST
Y003
137
SP
K10
30
OR
M4
66
SP
K10
102
OUT
M12
138
31
ANI
X000
67
103
LD
M12
139
LD
T15
32
RST
Y001
68
LD
T7
104
OUT
T12
140
RST
Y004
33
OUT
M4
69
RST
Y002
105
SP
K10
141
END
34
LD
M4
70
OUT
M8
106
142
35
OUT
T3
71
LD
M8
107
LD
T12
143
六、四节传送带载重设置控制梯形图
图3-3四节传送带载重设置控制梯形图
实验四机械手的模拟控制
一、实验目的
用PLC构成机械手控制系统
二、实验内容
1.控制要求
按起动后,传送带A运行直到按一下光电光电开关才停止,同时机械手下降。
下降到位后机械手夹紧物体,2s后开始上升,而机械手保持夹紧。
上升到位左转,左转到位下降,下降到位机械手松开,2s后机械手上升。
上升以位后。
传送带B开始运行,同时机械手右转,右转到位,传送带B停止,此时传送带A运行直到按一下光电开关才停止……循环
2.I/O分配(连线)
输入输出
起动按钮SB1:
X0上升YV1:
Y1
停止按钮SB2:
X5下降YV2:
Y2
上升限位SQ1:
X1左转YV3:
Y3
下降限位SQ2:
X2右转YV4:
Y4
左转限位SQ3:
X3夹紧YV5:
Y5
右转限位SQ4:
X4传送带A:
Y6
光电开关PS:
X6传送带B:
Y7
3.按图所示的梯形图输入程序
4.调试并运行程序
图4-1机械手示意图
三、机械手控制语句表
0
LD
X000
14
LD
X006
28
ANI
M103
42
1
OR
M0
15
OR
M16
29
ANI
M104
43
RST
M200
2
AND
X005
16
AND
M0
30
ANI
M105
44
LD
M100
3
OUT
M0
17
OUT
M16
31
ANI
M106
45
LD
M101
4
LD
X001
18
LD
M0
32
ANI
M107
46
AND
X002
5
OR
M0
19
ANI
M16
33
ANI
M108
47
ORB
6
OR
M11
20
LD
M109
34
ANI
M109
48
LD
M102
7
ANI
Y002
21
ANI
M110
35
AND
M16
49
AND
T0
8
OUT
M11
22
ORB
36
OUT
M100
50
ORB
9
LD
X004
23
OUT
Y006
37
LDI
X005
51
LD
M103
10
OR
M0
24
LD
M11
38
FNC
40
52
AND
X001
11
OR
M14
25
AND
M14
39
M101
53
ORB
12
ANI
Y003
26
ANI
M101
40
M109
54
LD
M104
13
OUT
M14
27
ANI
M102
41
55
AND
X003
56
ORB
69
LD
M109
82
OR
M105
95
OUT
Y003
57
LD
M105
70
AND
X006
83
OUT
Y002
96
LD
M106
58
AND
X002
71
ORB
84
LD
M102
97
RST
M200
59
ORB
72
FNC
35
85
SET
M200
98
OUT
T1
60
LD
M106
73
M100
86
OUT
T0
99
SP
K20
61
AND
T1
74
M101
87
SP
K20
100
62
ORB
75
K10
88
101
LD
M108
63
LD
M107
76
K1
89
LD
M200
102
ANI
M109
64
AND
X001
77
90
OUT
Y005
103
OUT
Y007
65
ORB
78
91
LD
M103
104
OUT
Y004
66
LD
M108
79
92
OR
M107
105
END
67
AND
X004
80
93
OUT
Y001
106
68
ORB
81
LD
M101
94
LD
M104
107
四、机械手控制梯形图
图4-2机械手梯形图
实验五五相步进电机的模拟控制
一、实验目的
用PLC构成五相步进电机控制系统
二、实验内容
1、控制要求
按下启动按钮SB1,A相通电(A亮)→B相通电(B亮)→C相通电(C亮)→D相通电(D亮)→E相通电(E亮)→A→AB→B→BC→C→CD→D→DE→E→EA→A→B……循环下去。
按下停止按钮SB2,所有操作都停止需重新起动。
2、I/O分配(连线)
输入输出
起动按钮(SB1):
X0A:
Y1D:
Y4
停止按钮(SB2):
X1B:
Y2E:
Y5
C:
Y3
3、按图所示的梯形图输入程序。
4、调试并运行程序。
图5-1五相步进电机控制示意图
三、五相步进电机控制语句表
0
LD
X000
17
LD
M10
34
51
LD
M104
1
OR
M1
18
OR
M2
35
52
OR
M111
2
AND
X001
19
OUT
M100
36
LD
M101
53
OR
M112
3
OUT
M1
20
LD
M115
37
OR
M106
54
OR
M113
4
LD
M1
21
OUT
T2
38
OR
M107
55
OUT
Y004
5
ANI
M0
22
SP
K20
39
OR
M115
56
LD
M105
6
OUT
T0
23
40
OUT
Y001
57
OR
M113
7
SP
K20
24
ANI
T2
41
LD
M102
58
OR
M114
8
25
OUT
M2
42
OR
M107
59
OR
M115
9
LD
T0
26
LD
M0
43
OR
M108
60
OUT
Y005
10
OUT
M0
27
FNC
35
44
OR
M109
61
LDI
X001
11
LD
M1
28
M100
45
OUT
Y002
62
FNC
40
12
OUT
T1
29
M101
46
LD
M103
63
M101
13
SP
K30
30
K15
47
OR
M109
64
M115
14
31
K1
48
OR
M110
65
15
ANI
T1
32
49
OR
M111
66
16
OUT
M10
33
50
OUT
Y003
67
END
四、五相步进电机控制梯形图
图5-2五相步进电机控制梯形图
实验六液体混合的模拟控制
一、实验目的
用PLC构成液体混合控制系统
二、实验内容
1.控制要求
按下起动按钮(SB1),电磁阀Y1打开,开始注入液体A,按L2按钮表示液体到了L2的高度,停止注入液体A。
同时电磁阀Y2打开,注入液体B,按L1按钮表示液体到了L1的高度,停止注入液体B,电机M开始搅拌,搅拌4s,停止搅拌。
同时打开Y3电磁阀,开始放出液体至液体高度为L3水平,再经2s停止放出液体。
同时液体A又注入。
开始循环。
按停止按钮,所有操作都停止,须重新启动。
2.I/O分配(连线)
输入输出
起动按钮(SB1):
X0Y1:
Y1
停止按钮(SB2):
X4Y2:
Y2
L1按钮:
X1Y3:
Y3
L2按钮:
X2Y4:
Y4
L3按钮:
X3
3.按图所示的梯形图输入程序
4.调试并运行程序
图6-1液体混合控制示意图
三、液体混合控制语句表
0
LD
X000
17
34
FNC
35
51
1
ANI
Y001
18
LD
M100
35
M100
52
LD
M104
2
ANI
Y002
19
LD
M101
36
M101
53
OR
M105
3
ANI
Y003
20
AND
X002
37
K6
54
OUT
Y003
4
ANI
Y004
21
ORB
38
K1
55
LD
M105
5
OUT
C1
22
LD
M102
39
56
OUT
T1
6
SP
K1
23
AND
X001
40
57
SP
K20
7
24
ORB
41
58
8
LD
Y003
25
LD
M103
42
59
LDI
X004
9
PLS
M1
26
AND
T0
43
LD
M101
60
FNC
40
10
27
ORB
44
OUT
Y001
61
M100
11
LD
M1
28
LD
M104
45
LD
M102
62
M106
12
RST
C1
29
AND
X003
46
OUT
Y002
63
13
30
ORB
47
LD
M103
64
14
LD
C1
31
LD
M105
48
OUT
Y004
65
RST
C1
15
OR
M106
32
AND
T1


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 可编程控制器 技术 实验 指导书
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《贝的故事》教案4.docx
《贝的故事》教案4.docx
-
《对韵歌》优秀教案8.docx
-
《函数yAsinωx+φ+P图象》wwwnet.docx
-
《静夜思》教学设计.docx
-
《汽车底盘构造与维修》题库与考核标准.docx
-
《世说新语》复习资料.docx
-
《我的服装我做主》教案设计.docx
-
《在品味情感中成长》教学片断设计.docx
-
11造价员《建设工程造价管理基础知识》精讲教程文件.docx
-
《不会叫的狗》教案 人教部编版1.docx
-
《操作系统》二学期A卷及答案.docx
-
《傅雷家书》名著阅读笔记.docx
-
《反不正当竞争法》下互联网平台封禁行为考辨以消费者用户合法权益保护为中心.docx
-
《化工原理》第六章蒸发.docx
-
《蓝海战略》概要11页.docx
-
《人生》读书心得.docx
-
《荷叶圆圆》公开课教案优秀教学设计26.docx
-
《科技出行研究报告》智能网联与新能源将变革未来汽车出行.docx
-
《272 向量的应用举例》导学案1.docx
-
《秋天》评课稿.docx
-
《电算化》第二章会计电算化的工作环境章节练习.docx
-
《室外给排水管道》施组.docx
-
《广东省建筑与装饰工程综合定额》计算规则.docx
-
《我多想去看看》教学.docx
-
《直通车车手基础认证》 考试答案 70题之欧阳育创编.docx
-
7天销量翻10倍皇冠卖家教您玩转最精准流量.docx
-
9 阿长和山海经.docx
-
《比例尺》教案.docx
-
《菜根谭》注译四闲适篇.docx
-
《福尔摩斯探案集》读后感15篇.docx
-
《红对勾》古代诗歌选择题答案补充.docx
-
《课堂密码》读后感及心得精选多篇.docx
-
安全环保应急知识竞赛复习题库及答案共120题Word文档下载推荐.docx
-
18秋华师华师《财务管理B》在线作业满分答案Word文件下载.docx
-
VI设计合同协议书范本Word文件下载.docx
-
XX城市道路工程项目建设可行性研究报告Word文档下载推荐.docx
-
八年级数学人教版第十九章一次函数导学案文档格式.docx
-
最新金融市场基础知识考纲对比分析Word文档格式.docx
-
20XX年乡镇村官管理工作总结Word文档下载推荐.docx
-
北京工业大学研究生学位论文撰写规范(试行)文档格式.doc
-
北京电大《网络编程技术》(asp)模拟试题(四)试卷及答案Word格式.doc
-
合同范文贴牌产品加工合同范本Word文档格式.docx
-
北京交通大学毕业设计指导手册Word格式.doc
-
科研项目立项的管理制度Word格式文档下载.docx
-
北京邮电大学通信认识实习报告Word文件下载.doc
 无形资产评估课件新与教科书结合PPT推荐.ppt
无形资产评估课件新与教科书结合PPT推荐.ppt
-
北京市科委项目建议书(2002年度-北京地区防沙治沙法律政策体系-课题2建议书)Word格式文档下载.doc
-
安全人机工程学试题Word文档下载推荐.docx
-
初中语文基础知识点之介词精选五套中考模拟卷Word下载.docx
-
助人为乐的1000字心得体会5篇集锦Word下载.docx
-
兵团科技计划项目管理暂行办法Word格式文档下载.docx
