 基于CAN总线的远程数据.docx
基于CAN总线的远程数据.docx
- 文档编号:28048175
- 上传时间:2023-07-07
- 格式:DOCX
- 页数:105
- 大小:745.28KB
基于CAN总线的远程数据.docx
《基于CAN总线的远程数据.docx》由会员分享,可在线阅读,更多相关《基于CAN总线的远程数据.docx(105页珍藏版)》请在冰豆网上搜索。
基于CAN总线的远程数据
摘要
CAN总线作为一种有效支持分布式控制和实时控制的技术,以其稳定性好、可靠性高、抗干扰能力强、通讯速率高、维护成本低及其独特的设计越来越受到人们的重视,并被公认为是最有前途的现场总线之一。
基于CAN总线的远程数据采集系统分为上位机、CAN总线和下位机三个部分。
上位机建立友好的人机交互界面;CAN总线采用总线型拓扑结构,通信电缆采用双绞线;下位机部分是两个传感器节点。
本论文重点介绍了下位机传感器节点的设计。
首先介绍了系统总体设计方案,然后对温度传感器节点使用的K型热电偶、温度传感器AD590和压力传感器节点使用的MPX53DP做简要介绍,并分析设计放大电路;接着介绍单片机AT89C52及其附属电路,特别对键盘做了重点分析介绍;分析软件算法,使用C51语言编程;最后介绍系统调试。
本设计实现了下位机对现场温度信号和压力信号的采集,通过键盘在线更改测量范围、报警值等参数。
关键词:
CAN总线;数据采集;下位机;AT89C52单片机
TheLong-distanceDataCollectionBasedonCANBus
--TheLowerComputer
Abstract
CANbustechnology,whichefficientlysupportsdistributedreal-timewithaveryhighlevelofsecurity,attractattentionwithaveryhighlevelofcapability.CANbushassomeadvantagessuchashighlevelofsecurity,stronganti-interference,highcommunicationspeedandlowofmaintenancecost.Itisaparticulardesign,anditisregardedafield-buswithexpansibility.
Thelong-distancedatacollectionbasedonCANbusisdividedintothreeparts:
uppercomputerandCANbusandlowercomputer.TheuppercomputerisestablishedfriendlyHuman-MachineInterface.CANbususesbustopologystructure,anduseUTPcablecommunications.Thelowercomputerusestwosensornodes.
Thispaper’semphasisistointroducethedesignofthelowercomputersensornode.Thisdesignfirstlyintroducedthesystemoverallprojectdesign.ItintroducedbrieflytheK-thermocouplewhichusestemperaturesensornode,andtheMPX53DPwhichusestemperaturesensorAD590andpressuresensornode.Itanalyzedthedesignenlargementelectriccircuit.ItalsointroducedAT89C52MCUanditssubsidiarycircuit,especiallyfocusedonanalyzingthekeyboard.Thenitanalyzedsoftwarealgorithm,andusedtheC51languageforitsprogramming.Itintroducedthesystemdebuggingfinally.Thisdesignhasrealizedthelowercomputertothescenetemperaturesignalandpressuresignalcollection;throughthekeyboarditcanchangeonlinemeasurementrangeandalarmsandsoon.
Keywords:
CANbus;datacollection;lowercomputer;AT89C52MCU
目录
摘要I
AbstractII
第一章基于CAN总线的远程数据采集系统总体方案1
1.1研究背景1
1.2方案的选择1
1.2.1数据采集分析1
1.2.2现场总线概述2
1.2.3CAN总线3
1.3系统设计方案4
第二章温度传感器节点7
2.1热电偶及其放大电路7
2.1.1热电偶测温原理7
2.1.2热电偶的种类及结构形成8
2.1.3热电偶的选择及其放大电路9
2.2热电偶的冷端温度补偿11
2.2.1热电偶的冷端温度补偿方法11
2.2.2AD590及其放大电路12
第三章压力传感器节点15
3.1压力传感器及其测温原理15
3.2放大电路16
第四章单片机数据处理模块18
4.1芯片选择18
4.1.1单片机的选择18
4.1.2A/D芯片的选择18
4.1.3看门狗选择18
4.2硬件电路连接19
4.3显示方式20
4.4键盘22
4.4.1键盘接口技术22
4.4.2键盘设置22
4.5看门狗及复位电路24
第五章软件编程26
5.1软件编程概述26
5.2温度传感器节点软件设计26
5.3压力传感器节点软件设计36
5.4编程心得42
第六章系统调试44
6.1下位机节点调试44
6.1.1模拟放大电路调试44
6.1.2显示电路调试45
6.1.3单片机模块调试45
6.1.4键盘调试46
6.2综合调试46
6.3设计结果47
参考文献48
附录A基于CAN总线的远程数据采集系统硬件原理图49
附录B温度传感器节点硬件原理图50
附录C压力传感器节点硬件原理图51
附录D下位机C51程序清单52
致谢93
第一章基于CAN总线的远程数据采集系统总体方案
1.1研究背景
随着现代工业技术的发展,特别是计算机、控制、网络通信技术在工业中各个具体行业的广泛应用,促进了计算机、控制、网络通讯技术的发展,同时这些技术又与各个行业中的其它技术融合,促进了各个行业的飞速发展[1]。
自从微处理器问世以来,其微型化、低成本的特点使计算机控制技术深入到工业技术最核心、最基本的环节,并逐步形成了单片机、可编程控制器、工业控制计算机三大主流系列,实现了多层次、全过程的计算机控制。
单片机作为内嵌式控制器构成了各种智能测试系统或智能仪表,实现了计算机控制的底层化;可编程控制器作为各种工控机的主控模块,实现了计算机控制的单机化;而以工业控制计算机作为上位机,以单片机、可编程控制器作为下位机的分布式控制系统则实现了计算机控制的网络化。
特别是单片机的出现,使计算机控制可以达到元件级,因而出现了越来越多的新型自控元件,甚至出现了集成有单片机的智能元件。
计算机控制技术已经成为工业技术中最重要的核心技术[2]。
在工业生产中,数据采集、数据传输、数据处理、数据存储都是保证设备正常运行的关键技术。
数据采集是保证设备正常运行的第一步,数据的准确快速采集就显得尤为重要。
在数据采集领域,各种数据采集仪器都向智能化、集成化、高精度的方向发展,而且要求数据能传输到远离现场的控制中心,所以有必要设计一种智能化的、集成化的远程数据采集系统。
1.2方案的选择
1.2.1数据采集分析
本文设计了一个远程数据采集系统。
采集的信号为两个温度信号和两个压力信号,经过微处理器处理后在下位机上显示,并且要把采样信号送到远程上位机的工控机上集中显示。
由于传感器输出的信号一般是毫伏电压或毫安电流信号,而工业标准的电压和电流信号是0~5V和4~20mV,所以必须把传感器输出的信号放大成0~5伏的标准电压信号或4~20mV的标准电流信号,以便信号的传输和做进一步处理。
所以本设计使用了模拟放大电路。
数据的采集可以选用FPGA、单片机、FPGA与单片机结合的方法来实现,但是相对于单片机而言,FPGA造价高,在一般的工业控制场合,单片机具有价格便宜,功能齐全等优点,单片机就已经能够达到本设计的要求。
本设计选用单片机作为下位机传感器节点的智能芯片。
由于数据要进行远距离的传输,所以远距离的数据传输是一个必须考虑的问题。
1.2.2现场总线概述
RS-485总线在过程控制中应用广泛,但随着科技的发展,RS-485的总线效率低、系统的实时性差、通讯的可靠性低、后期维护成本高、网络工程调试复杂、传输距离不理想、单总线可挂接的节点少、应用不灵活等缺点慢慢暴露出来,面临着被市场所淘汰的局面。
而现场总线由于在通信能力、可靠性、实时性、灵活性、易用性、传输距离远、成本低等方面有着明显的优势,在工业中应用越来越广泛,逐渐取代了RS-485总线。
在传统的工业控制中,现场的传感器与控制器之间总是以4~20mA的直流电流或1-5V的直流电压来传递信息的[1]。
随着工业控制技术的不断发展,工业控制系统正向着数字化、智能化、网络化和开放化的方向发展,模拟传输渐渐被数字传输所取代。
而现场总线则可以很好地适应工业控制技术发展的趋势,是对成熟控制系统结构的根本变革。
现场总线是用于过程控制中现场仪表与控制室之间的一个标准的、开放的、双向的多站数字通信系统。
随着计算机技术、通讯技术、集成电路技术的发展,现场总线正在迅速发展。
现场总线技术将各种智能芯片置入传统的测量控制仪表,使它们各自具有数字计算和通信能力,采用可进行简单连接的双绞线等作为总线,把多个测量控制仪表连接成的网络系统,并按公开、规范的通信协议,在位于现场的多个微型计算机化测量控制设备之间以及现场仪表与远程监控计算机之间,实现数据传输与信息交换,形成各种适应实际需要的自动控制系统。
简而言之,它把单个分散的测量控制设备变成网络节点,以现场总线为纽带,连接成可以相互沟通信息、共同完成自控任务的网络系统与控制系统[3]。
现场总线的种类主要有:
基金会现场总线FF、ProfiBus总线、WorldFIP总线、ControlNet总线、CAN总线等。
1.2.3CAN总线
CAN总线是德国BOSCH公司从80年代初为解决现代汽车中众多的控制与测试仪器之间的数据交换而开发的一种串行数据通信协议,它是一种多主总线,通信介质可以是双绞线、同轴电缆或光导纤维。
通信速率可达1MBPS。
由于其卓越性能现已广泛应用于工业自动化、多种控制设备、交通工具、医疗仪器以及建筑、环境控制等众多部门。
CAN总线通信接口中集成了CAN协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括位填充、数据块编码、循环冗余检验、优先级判别等工作[4]。
CAN协议的一个最大特点是废除了传统的站地址编码,而代之以对通信数据块进行编码。
采用这种方法的优点可使网络内的节点个数在理论上不受限制,数据块的标识码由11位或29位二进制数组成。
这种按数据块编码的方式,还可使不同的节点同时接收到相同的数据,这一点在分布式控制系统中非常有用。
CAN总线采用多主竞争的工作方式和非破坏性总线仲裁技术,总线上任意节点可在任意时刻主动地向网络上其它节点发送信息而不分主次,各节点之间实现自由通信。
当多个节点同时向总线发信息时,优先级较低的节点会主动退出发送,而优先级较高的节点不受影响,大大节省了总线冲突仲裁时间。
在网络负载很重的情况下,也不会出现网络瘫痪的情况。
CAN总线通信格式采用短帧格式,传输时间短,受干扰概率低,具有极好的检错效果。
CAN卓越的特性、极高的可靠性和独特的设计,特别适合工业过程监控设备的互连,因此,越来越受到工业界的重视,并已公认为最有前途的现场总线之一。
CAN总线协议已被国际标准化组织认证,技术比较成熟,控制的芯片已经商品化,性价比高,特别适用于分布式测控系统之间的数据通讯[4]。
1.3系统设计方案
由于CAN总线具有上述优点,所以本设计采用基于CAN总线的数据采集系统。
系统的设计总体上分为三个部分,上位机部分(包括CAN总线接口),CAN总线,下位机部分(包括CAN总线接口)。
系统框图在CAN总线上挂接两路传感器节点和一路监测节点。
温度传感器节点使用K型热电偶和集成温度传感器AD590采集温度信号;压力传感器节点使用两个MPX53DP压力传感器采集信号;上位机使用工控机或通用PC机对所采集的数据进行在线监测。
本设计主要负责下位机传感器节点的设计。
下面分别介绍下位机节点中的温度传感器节点和温度传感器节点的设计。
温度传感器节点设计。
K型热电偶把现场温度转换成对应的毫伏信号,经放大电路放大成标准电压信号0~5V后,送A/D转换芯片TLC0832的数据采集输入端口CH0进行A/D转换,AD590传感器采集到的毫伏电流信号经电流/电压转换电路转换成对应毫伏电压信号,再经放大电路放大,送TLC0832的数据采集输入端口CH1进行A/D转换,两个传感器对应的标准电压信号分时经TLC0832的8位A/D转换后送单片机89C52。
AD590采集到的温度既作为一路采集温度在上位机上显示,又作为K热电偶的冷端补偿温度。
采样信号在单片机中做相应处理后在下位机上进行显示,同时采用定时中断的方式把采集的温度、压力信号经CAN总线传输到工控机上进行远程监测。
图1.1基于CAN总线的远程数据采集系统结构框图
压力传感器节点设计。
两个MPX53DP压力传感器把压力转换成对应的毫伏电压信号,再经放大电路放大后,经TLC0832分时采集送单片机89C52,单片机处理后送显示,通过定时中断把采样的压力数字信号经CAN总线送到上位机上实时显示。
在2个下位机传感器节点上,单片机89C52都接看门狗复位电路、键盘和数码管等附属电路。
看门狗X5045监视单片机的正常运行,数码管用于显示相应的值,键盘用于改变报警值等参数,修改参数后能通过CAN总线把修改的参数上传给上位机。
在CAN总线中,系统通过CAN-RS232转接接口把数据传输给上位机。
上位机接收CAN总线上的压力数字信号和温度数字信号,经处理后存储到数据库并实时显示,同时可以调出历史数据进行显示,也可以远程在线修改下位机的参数。
第二章温度传感器节点
本节点通过两个传感器采集温度信号,并通过放大电路放大信号,经A/D转换送到单片机中进行处理后送显示;每隔一定时间把采样数字信号经CAN总线通信,在上位机显示;通过键盘可以更改上、下限报警值和热电偶线性化的折点坐标。
本章主要介绍温度传感器节点,其它部分在后续章节中将有详细介绍。
2.1热电偶及其放大电路
2.1.1热电偶测温原理
热电偶传感器是一种将温度变化转换为电势变化的传感器。
在工业生产中,热电偶是应用最广泛的测温元件之一。
其主要优点是测温范围广,精度高、性能稳定、结构简单、动态性能好,把温度转换为电势信号便于处理和远距离传输[5]。
热电偶把两种不同的金属A和B构成一个闭合电路,当两个接触端温度不同,即T>T0时,回路中会产生热电势EAB(T,T0),如图2.1所。
图2.1热电偶原理图
由于不同的金属材料内部的自由电子密度不相同,当两种金属材料A和B接触时,自由电子就要从密度大的金属材料扩散到密度小的金属材料中去,从而产生自由电子的扩散现象,如图2.2所示。
图2.2热电偶接触热电势示意图
当金属材料A的自由电子密度比金属材料B大,则有自由电子从A扩散到B,当扩散达到平衡时,这样金属材料A失去电子带正电荷,而金属材料B得到电子带负电荷。
这样,在A,B接触处形成一定的电位差,这就是接触电势(也叫帕尔帖电势),其大小可表示为
(2.1)
式中,
为电极A和电极B在温度为T时的接触电势;
为玻耳兹曼常数;T为接触面的绝对温度;
为单位电荷量;
、
分别为金属电极A和B的自由电子密度。
2.1.2热电偶的种类及结构形成
常用热电偶可分为标准热电偶和非标准热电偶两大类。
所谓标准热电偶是指国家标准规定了其热电势与温度的关系、允许误差、并有统一的标准分度表的热电偶,它有与其配套的显示仪表可供选用。
非标准化热电偶在使用范围或数量级上均不及标准化热电偶,一般也没有统一的分度表,主要用于某些特殊场合的测量。
S、B、E、K、R、J、T七种标准化热电偶为我国统一设计型标准热电偶[5]。
K型(镍铬—镍硅)是使用量最大的廉金属热电偶,用量为其他热电偶的总和。
其使用温度0~1300℃。
优点是线性度好,热电势较大,灵敏度较高,稳定性较好,抗氧化性强,价格便宜。
能用于氧化性和惰性气氛中。
但K型热电偶不能在高温下直接用于硫、还原性或还原、氧化交替的气氛中,也不能用于真空中。
2.1.3热电偶的选择及其放大电路
本设计选用K型热电偶作为测温元件。
其分度表如下:
表2.1K型热电偶分度表
温度
(℃)
0
10
20
30
40
50
60
70
80
90
热电动势(mV)
0
0.000
0.397
0.798
1.203
1.611
2.022
2.436
2.850
3.266
3.681
100
4.095
4.508
4.919
5.327
5.733
6.137
6.539
6.939
7.38
7.737
200
8.137
8.537
8.938
9.341
9.745
10.151
10.560
10.969
11.381
11.793
300
12.207
12.623
13.039
13.456
13.874
14.292
14.712
15.132
15.552
15.974
400
16.395
16.818
17.274
17.664
18.088
18.513
18.969
19.363
19.788
20.214
500
20.640
21.066
21.493
21.919
22.346
22.772
23.198
23.624
24.050
24.747
600
24.902
25.327
25.751
26.176
26.599
27.022
27.445
27.867
28.288
28.709
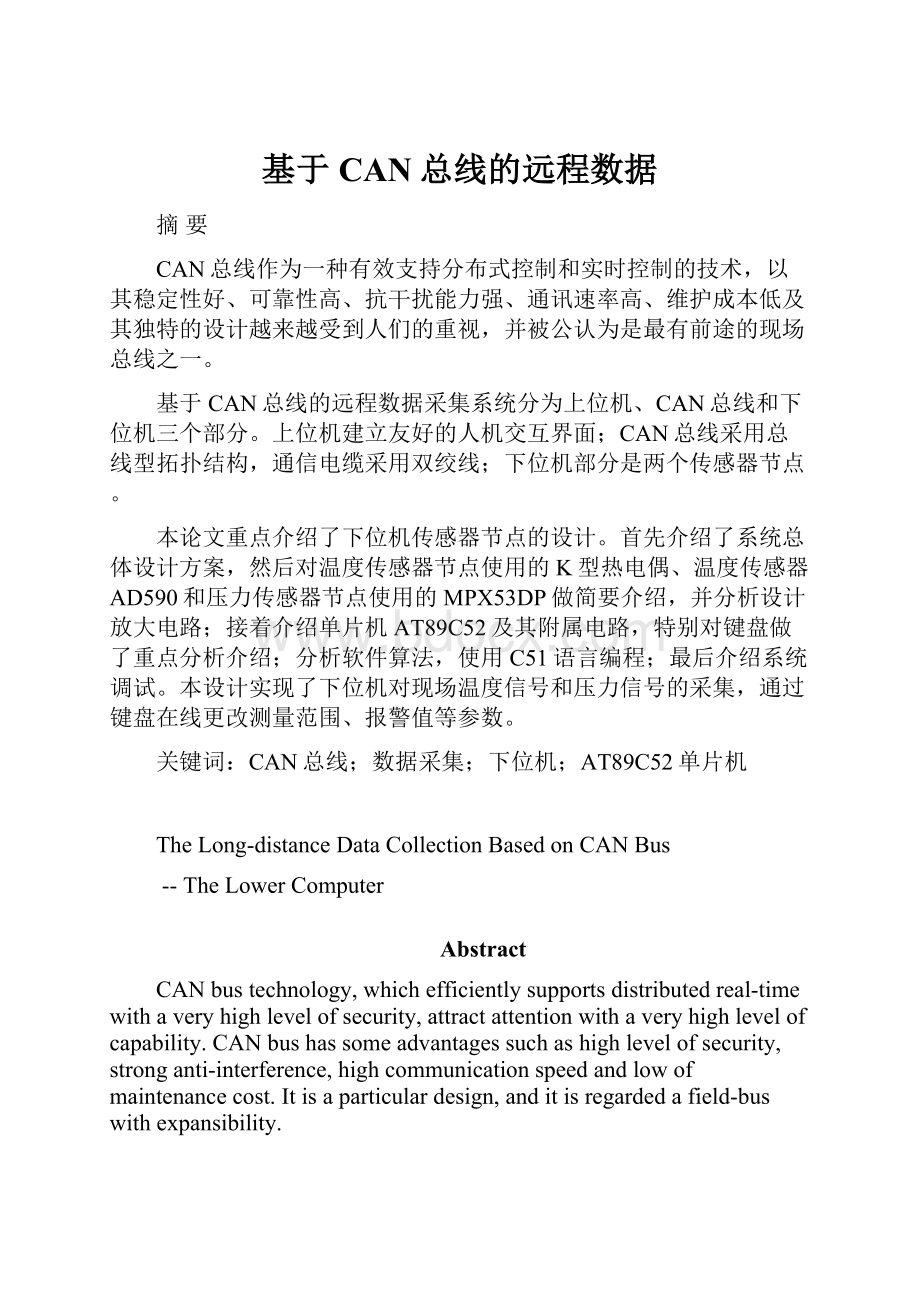
图2.3是由表2.1得到的K热电偶温度和输出热电势关系图。
由表2.1和图2.3可知,K型热电偶输出的是毫伏电压信号,而单片机采样接收的是标准的电压信号,所以必须把毫伏电压信号放大成0~5V的标准电压信号。
在设计模拟放大电路时,必须考虑电路的零点漂移、抗干扰等问题。
图2.3K型热电偶温度-输出热电势关系图
放大电路如图2.4所示:
图2.4K热电偶放大电路
如图所示,INP+接热电偶的正极,INP-接热电偶的负极,R22起上拉电阻的作用,电容起到滤波抗干扰的作用。
放大器为高阻态运算放大器。
RW4电位器用于零位调节。
RW5用于调节放大倍数。
由图可求出放大电路的放大倍数
(2.2)
式中RW5为接入电阻,单位为kΩ。
本设计采集的温度为0到400℃,K热电偶对应产生的热电势为0到16.395mV,而A/D转换的输入电压为0到5V,所以放大倍数为
(2.3)
从而RW5=0.5kΩ。
2.2热电偶的冷端温度补偿
2.2.1热电偶的冷端温度补偿方法
由热电偶测温公式可知,热电偶的热电势大小不仅和热端温度有关,还和冷端温度有关,只有当冷端温度恒定的时,才能通过测量热电势的大小得到热端温度。
当热电偶冷端处在温度波动较大的地方时,必须首先使用冷端温度补偿导线将冷端延长到一个温度稳定的地方,再考虑将冷端处理为0℃。
这就是热电偶的冷端处理和补偿[5]。
常用补偿方法如下:
1.补偿导线法:
补偿导线在100℃以下的温度范围内,具有与热电偶相同的热电特性,用它连接热电偶可以起到延长热电偶冷端的作用。
2.热电偶冷端温度恒温法:
这种方法就是通过一定的方法把热电偶的冷端温度保持在恒定的温度,一般为0℃。
由于这种方法特别麻烦,在工业生产中不适用,目前这种方法只在实验室的精确测量和检定热电偶时使用。
3.冷端补偿电桥法:
这种方法是利用直流不平衡电桥产生的电势来补偿热电偶冷端温度变化而引起的热电势的变化值。
补偿电桥的4个桥臂中有一个臂是铜电阻作为感温元件,其余3个臂由阻值恒定的锰铜电阻制成。
4.软件计算修正法:
在实际应用中,热电偶的参比端往往不是0℃,而是环境温度T1,这时测量出的回路热电势比实际温度对应的热电势要偏小,因此必须加上环境温度T1与冰点T0之间温差所产生的热电势后才能符合热电偶的分度表的要求。
根据连接导体和中间温度定律则有
(2.4)
可以用室温计测出环境温度T1,从分度表查出E(T1,0)的值,然后加上热电偶回路热电势E(T,T1),得到E(T,0)值,反查分度表即可得到准确的被测温度T值。
本设计采用软件计算修正的方法来实现热电偶的冷端温度补偿。
2.2.2AD590及其放大电路
由上一小节可知,软件修正法中必须知道冷端温度,所以必须测量冷端温度,本设计用AD590传感器采集冷端温度。
AD590是美国模拟器件公司生产的单片集成两端感温电流源。
AD590温度传感器具有线性好、精度适中、灵敏度高、体积小、使用方便等优点。
AD590的外部形状及管脚如图2.5所示。
图2.5AD590外型管脚图
它的主要特性如下:
流过器件的电流(mA)等于器件所处环境的热力学温度(开尔文)度数,即:
mA/K其中Ir流过器件(AD590)的电流,单位为mA;T为热力学温度,单位为K。
AD590的测温范围为-55℃~+150℃。
AD590的电源电压范围为4V~30V, 输出电阻为710M。
精度高。
AD590可以承受44V,正向电压和20V反向电压,因而器件反接也不会被损坏。
AD590共有I、J、K、L、M五档,其中M档精度最高,在-55℃~+150℃范围内,非线性误差为±0.3℃。
图2.6AD590放大电路
如图2.6所示,AD590的放大电路采用三运放差分放大电路。
放大器的第
级由U1A和U2A等器件组成,主要用来提高整个放大电路的输入阻抗。
第
级主要由U3A等器件组成,采用差动电路用以提高共模抑制比。
图中是将U1A、U2A两个同相输入运放电路并联,再与U3A差分输入串联的三运放差分放大电路,根据虚短、虚断的概念,不难分析U1A、U2A前置放大电路仅对差模信号有放大作用,差模放大倍数为(RW3+R15+2R14)/(RW3+R15)倍。
U1A、U2A提高了差模信号与共模信号之比,即提高了信噪比。
电路的另一个特点是对共模输入信号没有放大作用,共模电压增益接近于零。
这个因素不仅与实际的共模输入有关,而且也与U1A和U2A的失配电压和漂移有关。
当U1A和U2A有相等的漂移速率,且向同一方向漂移,那


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 基于 CAN 总线 远程 数据
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《贝的故事》教案4.docx
《贝的故事》教案4.docx
-
《对韵歌》优秀教案8.docx
-
《函数yAsinωx+φ+P图象》wwwnet.docx
-
《静夜思》教学设计.docx
-
《汽车底盘构造与维修》题库与考核标准.docx
-
《世说新语》复习资料.docx
-
《我的服装我做主》教案设计.docx
-
《在品味情感中成长》教学片断设计.docx
-
11造价员《建设工程造价管理基础知识》精讲教程文件.docx
-
《不会叫的狗》教案 人教部编版1.docx
-
《操作系统》二学期A卷及答案.docx
-
《傅雷家书》名著阅读笔记.docx
-
《反不正当竞争法》下互联网平台封禁行为考辨以消费者用户合法权益保护为中心.docx
-
《化工原理》第六章蒸发.docx
-
《蓝海战略》概要11页.docx
-
《人生》读书心得.docx
-
《荷叶圆圆》公开课教案优秀教学设计26.docx
-
《科技出行研究报告》智能网联与新能源将变革未来汽车出行.docx
-
《272 向量的应用举例》导学案1.docx
-
《秋天》评课稿.docx
-
《电算化》第二章会计电算化的工作环境章节练习.docx
-
《室外给排水管道》施组.docx
-
《广东省建筑与装饰工程综合定额》计算规则.docx
-
《我多想去看看》教学.docx
-
《直通车车手基础认证》 考试答案 70题之欧阳育创编.docx
-
7天销量翻10倍皇冠卖家教您玩转最精准流量.docx
-
9 阿长和山海经.docx
-
《比例尺》教案.docx
-
《菜根谭》注译四闲适篇.docx
-
《福尔摩斯探案集》读后感15篇.docx
-
《红对勾》古代诗歌选择题答案补充.docx
-
《课堂密码》读后感及心得精选多篇.docx
-
中国色谱仪产业深度调研报告.docx
-
Edlfio医学趣味记忆法.docx
-
报审表.docx
-
中级财务会计第1次作业.docx
-
北京印刷学院教育学专业实习总结报告范文模板.docx
-
中级质量专业技术人员职业资格考试综合知识模拟试题.docx
-
安全隐患排查方案.docx
-
中考生物试题分考点汇编探究实验非选择题2.docx
-
北师大版四年级数学下册小数的意义综合练习题151.docx
-
语文教师个人工作总结高一.docx
-
中考物理试题专题训练声现象专题答案版.docx
-
笔记本电脑背光键盘行业分析报告.docx
-
在工业发展座谈会上的讲话沈市长.docx
-
中考压轴题.docx
-
同样的一辈子外出打工和在家乡混的区别.docx
-
网络及新媒体环境下律师的言论表达界限.docx
-
毕业设计论文理工类解小宝DOC.docx
-
云南省中小学幼儿园信息技术应用能力提升工程项目培训实施方案.docx
-
中南大学单片机.docx
