 北航惯性导航大作业任务.docx
北航惯性导航大作业任务.docx
- 文档编号:27921385
- 上传时间:2023-07-06
- 格式:DOCX
- 页数:32
- 大小:1.12MB
北航惯性导航大作业任务.docx
《北航惯性导航大作业任务.docx》由会员分享,可在线阅读,更多相关《北航惯性导航大作业任务.docx(32页珍藏版)》请在冰豆网上搜索。
北航惯性导航大作业任务
惯性导航基础课程大作业报告
(一)
光纤陀螺误差建模与分析
班级:
111514
姓名:
学号
2014年5月26日
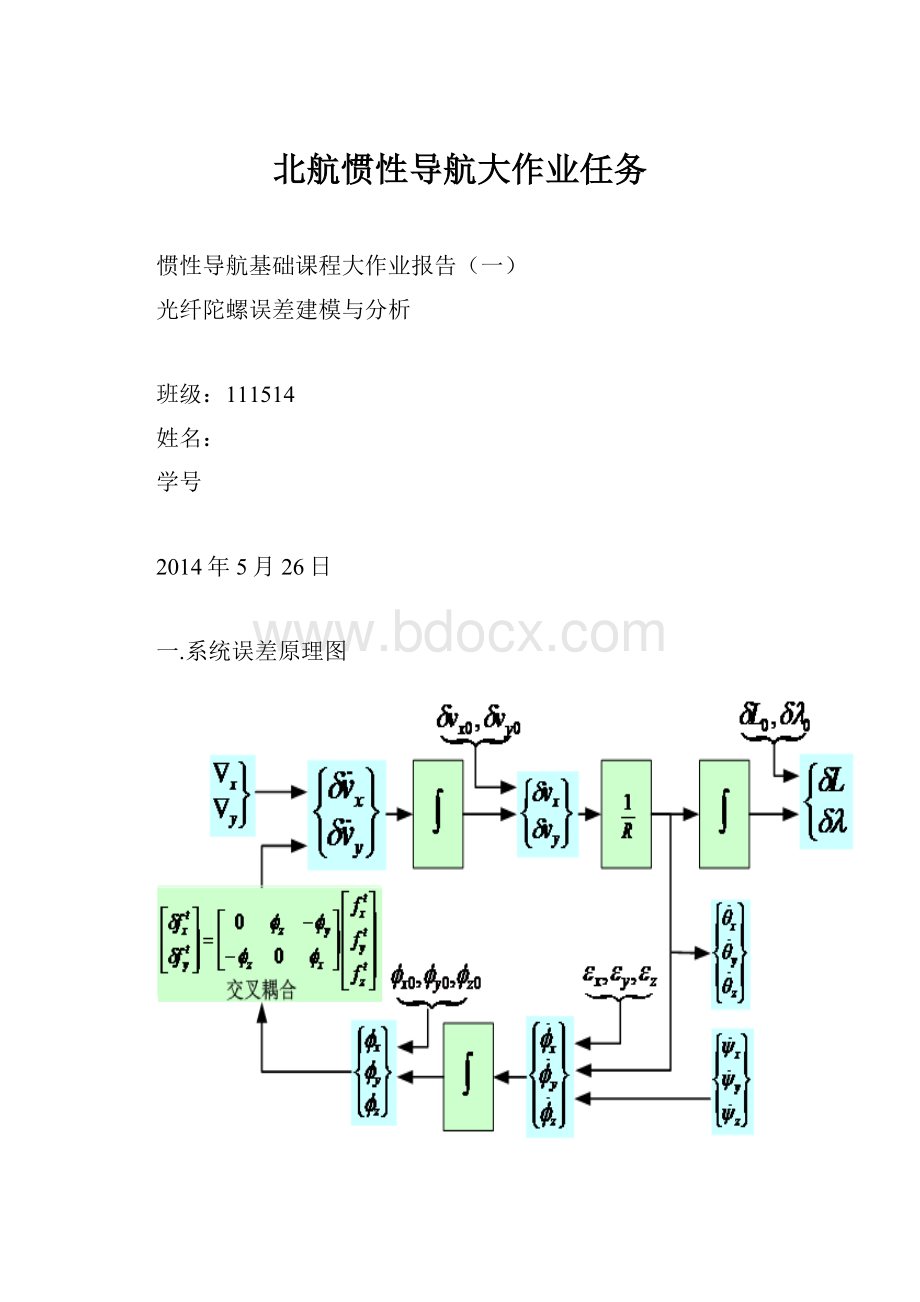
一.系统误差原理图
二.系统误差的分析
(一)漂移引起的系统误差
1.εx,εy,εz对东向速度误差δVx的影响
clc;clearall;
t=1:
0.01:
25;
g=9.8;
L=pi/180*39;
Ws=2*pi/84.4*60;
Wie=2*pi/24;
R=g/(Ws)^2;
e=0.1*180/pi;
mcVx1=e*g*sin(L)/(Ws^2-Wie^2)*(sin(Wie*t)-Wie*sin(Ws*t)/Ws);
mcVx2=e*((Ws^2-(Wie^2)*((cos(L))^2))/(Ws^2-Wie^2)*cos(Ws*t)-(Ws^2)*((sin(L))^2)*cos(Wie*t)/(Ws^2-Wie^2)-(cos(L))^2);
mcVx3=(sin(L))*(cos(L))*R*e*((Ws^2)*cos(Wie*t)/(Ws^2-Wie^2)-(Wie^2)*cos(Ws*t)/(Ws^2-Wie^2)-1);
plot(t,[mcVx1',mcVx2',mcVx3']);
title('Ex,Ey,Ez对Vx的影响');
xlabel('时间t');
ylabel('Vx(t)');
legend('Ex-mcVx1','Ey-mcVx2','Ez-mcVx3');
grid;
axissquare;
分析:
εx,εy,εz对东向速度误差δVx均有地球自转周期的影响,εx,εy还会有舒勒周期分量的影响,其中,εy对δVx的影响较大。
2.εx,εy,εz对东向速度误差δVy的影响
clc;clearall;
t=1:
0.01:
25;
g=9.8;
L=pi/180*39;
Ws=2*pi/84.4*60;
Wie=2*pi/24;
R=g/(Ws)^2;
e=0.1*180/pi;
mcVy1=e*g*(cos(Wie*t)-cos(Ws*t))/(Ws^2-Wie^2);
mcVy2=g*sin(L)*e/(Ws^2-Wie^2)*(sin(Wie*t)-Wie/Ws*sin(Ws*t));
mcVy3=g*cos(L)*e/(Ws^2-Wie^2)*(sin(Wie*t)-Wie/Ws*sin(Ws*t));
plot(t,[mcVy1',mcVy2',mcVy3']);
title('Ex,Ey,Ez对Vy的影响');
xlabel('时间t');
ylabel('Vy(t)');
legend('Ex-mcVy1','Ey-mcVy2','Ez-mcVy3');
grid;
axissquare;
分析:
εx,εy,εz对北向速度误差δVy均有地球自转周期,舒勒周期分量的影响。
其中,εx对δVy的影响较大;εy,εz产生的影响几乎相近。
3.εx,εy,εz对东向速度误差δL的影响
clc;clearall;
t=1:
0.01:
25;
g=9.8;
L=pi/180*39;
Ws=2*pi/84.4*60;
Wie=2*pi/24;
R=g/(Ws)^2;
a=Ws^2-Wie^2;
b=sin(L);
c=cos(L);
d=sin(Wie*t);
e=cos(Wie*t);
f=sin(Ws*t);
h=cos(Ws*t);
mcL1=Ws^2*0.1/a*(d/Wie-f/Ws);
mcL2=(Ws^2*Wie*b/a*(h/Ws^2-e/Wie^2)+b/Wie)*0.1;
mcL3=(Ws^2*c*e/Wie/a-Wie*c*h/a-c/Wie)*0.1;
plot(t,[mcL1',mcL2',mcL3']);
title('Ex,Ey,Ez对mcL的影响');
xlabel('时间t');
ylabel('mcL(t)');
legend('Ex-mcL1','Ey-mcL2','Ez-mcL3');
grid;
分析:
εx,εy,εz对纬度误差δL均有地球自转周期的影响,εx还会有舒勒周期分量的影响。
4.εx,εy,εz对东向速度误差δλ的影响
clc;clearall;
t=1:
0.01:
50;
pi=3.14;
g=9.8;
L=pi/180*39;
Ws=2*pi/84.4*60;
Wie=2*pi/24;
R=g/(Ws)^2;
a=Ws^2-Wie^2;
b=sin(L);
c=cos(L);
d=sin(Wie*t);
e=cos(Wie*t);
f=sin(Ws*t);
h=cos(Ws*t);
mcLONG1=(tan(L)/Wie*(1-e)-Wie*c*h/a)*0.1;
mcLONG2=(sec(L)*(Ws^2-Wie^2*c^2)*f/Ws/a-Ws^2*tan(L)*b*d/Wie/a-t*c)*0.1;
mcLONG3=(Ws^2*b*d/Wie/a-Wie^2*b*f/a/Ws-t*b)*0.1;
plot(t,[mcLONG1',mcLONG2',mcLONG3']);
title('Ex,Ey,Ez对mcLONG.的影响');
xlabel('时间t');
ylabel('mcLONG.(t)');
legend('Ex-mcLONG.1','Ey-mcLONG.2','Ez-mcLONG.3');
grid;
axissquare;
分析:
εx,εy,εz对经度误差δλ均有地球自转周期的影响,εy还会有舒勒周期分量的影响,其中,εy,εz还产生了随时间累积的分量。
5.εx,εy,εz对东向速度误差δφX的影响
clc;clearall;
t=1:
0.01:
25;
pi=3.14;
g=9.8;
L=pi/180*39;
Ws=2*pi/84.4*60;
Wie=2*pi/24;
R=g/(Ws)^2;
a=Ws^2-Wie^2;
b=sin(L);
c=cos(L);
d=sin(Wie*t);
e=cos(Wie*t);
f=sin(Ws*t);
h=cos(Ws*t);
mcAngle1=(Ws*f-Wie*d)/a*0.1;
mcAngle2=Wie*b*(e-h)/a*0.1;
mcAngle3=Wie*c*(h-e)/a*0.1;
plot(t,[mcAngle1',mcAngle2',mcAngle3']);
title('Ex,Ey,Ez对mcAngle的影响');
xlabel('时间t');
ylabel('mcAngle(t)');
legend('Ex-mcAngle1','Ey-mcAngle2','Ez-mcAngle3');
grid;
axissquare;
分析:
εx,εy,εz对水平方位误差φx均有地球自转周期,舒勒周期分量的影响,其中,εx对φx产生的影响最大。
5.εx,εy,εz对东向速度误差δφY的影响
clc;clearall;
t=1:
0.01:
25;
pi=3.14;
g=9.8;
L=pi/180*39;
Ws=2*pi/84.4*60;
Wie=2*pi/24;
R=g/(Ws)^2;
a=Ws^2-Wie^2;
b=sin(L);
c=cos(L);
d=sin(Wie*t);
e=cos(Wie*t);
f=sin(Ws*t);
h=cos(Ws*t);
mcAngle1=Wie*b*(h-e)/a*0.1;
mcAngle2=((Ws^2-Wie^2*c^2)/Ws/a*f-Wie*b^2/a*d)*0.1;
mcAngle3=Wie*b*c/a*(d-Wie/Ws*f)*0.1;
plot(t,[mcAngle1',mcAngle2',mcAngle3']);
title('Ex,Ey,Ez对mcAngley的影响');
xlabel('时间t');
ylabel('mcAngley(t)');
legend('Ex-mcAngle1','Ey-mcAngle2','Ez-mcAngle3');
grid;
axissquare;
分析:
εx,εy,εz对水平方位误差φy均有地球自转周期的影响,而εx,εy还产生了舒勒周期分量的影响,其中,εy对φy产生的影响最大。
5.εx,εy,εz对东向速度误差δφZ的影响
clc;clearall;
t=1:
0.01:
25;
pi=3.14;
g=9.8;
L=pi/180*39;
Ws=2*pi/84.4*60;
Wie=2*pi/24;
R=g/(Ws)^2;
a=Ws^2-Wie^2;
b=sin(L);
c=cos(L);
d=sin(Wie*t);
e=cos(Wie*t);
f=sin(Ws*t);
h=cos(Ws*t);
mcAngle1=(sec(L)/Wie*(1-e)+Wie*b*b/c*(h-e)/a)*0.1;
mcAngle2=(Wie^2*b*c-Ws^2*b/c)/a*(d/Wie-f/Ws)*0.1;
mcAngle3=((Ws^2-Wie^2*c^2)*d/Wie/a-Wie^2*b^2*f/Ws/a)*0.1;
plot(t,[mcAngle1',mcAngle2',mcAngle3']);
title('Ex,Ey,Ez对mcAnglez的影响');
xlabel('时间t');
ylabel('mcAnglez(t)');
legend('Ex-mcAngle1','Ey-mcAngle2','Ez-mcAngle3');
grid;
分析:
εx,εy,εz对方位姿态误差φz均有地球自转周期的影响,而εy还产生了舒勒周期分量的影响,其中,εx对φz产生的影响最大。
(二)加速度计零偏引起的系统误差
1.Δx对φy,φz以及Δy对φx的影响
clc;clearall;
t=1:
0.01:
25;
g=9.8;
L=pi/180*39;
Ws=2*pi/84.4*60;
Wie=2*pi/24;
R=g/(Ws)^2;
a=Ws^2-Wie^2;
b=sin(L);
c=cos(L);
d=sin(Wie*t);
e=cos(Wie*t);
f=sin(Ws*t);
h=cos(Ws*t);
amc=0.0001*g;
mcAnglez=b/c/g*(1-h)*amc*180/pi*3600;
mcAngley=(1-h)/g*amc*180/pi*3600;
mcAnglex=-(1-h)/g*amc*180/pi*3600;
subplot(311);plot(t,mcAnglex,'r-');xlabel('时间t');ylabel('mcAnglex(t)');
legend('amcy-mcAnglex');grid;
subplot(312);plot(t,mcAngley,'g-');xlabel('时间t');ylabel('mcAngley(t)');
legend('amcx-mcAngley');grid;
subplot(313);plot(t,mcAnglez,'b-');xlabel('时间t');ylabel('mcAnglez(t)');
legend('amcx-mcAnglez');grid;
分析:
Δx对φy,φz以及Δy对φx的影响包含了常值分量和舒乐振荡分量。
2.Δx对δVx,Δy对δVy,Δy对δL,Δx对δλ的影响
clc;clearall;
t=1:
0.01:
25;
pi=3.14;
g=9.8;
L=pi/180*39;
Ws=2*pi/84.4*60;
Wie=2*pi/24;
R=g/(Ws)^2;
a=Ws^2-Wie^2;
b=sin(L);
c=cos(L);
d=sin(Wie*t);
e=cos(Wie*t);
f=sin(Ws*t);
h=cos(Ws*t);
amc=0.0001*g;
mcVx=f/Ws*amc;
mcVy=f/Ws*amc;
mcL=(1-h)/g*amc*180/pi*3600;
mcLONG=sec(L)*amc/g*(1-h)*180/pi*3600;
subplot(221);plot(t,mcVx,'r:
');xlabel('时间t');ylabel('mcVx(t)');grid;
subplot(222);plot(t,mcVy,'g:
');xlabel('时间t');ylabel('mcVy(t)');grid;
subplot(223);plot(t,mcL,'b:
');xlabel('时间t');ylabel('mcL(t)');grid;
subplot(224);plot(t,mcLONG,'b:
');xlabel('时间t');ylabel('mcLONG(t)');grid;
分析:
Δx对δVx,Δy对δVy,Δy对δL,Δx对δλ,均包含了常值分量和舒乐振荡分量的影响。
(三)起始误差对系统误差的影响
1.δVx0,δVy0,δL0,φx0,φy0,φz0对δVx的影响
symss;
t=1:
0.01:
25;
g=9.8;
L=pi/180*39;
Ws=2*pi/84.4*60;
Wie=2*pi/24;
R=g/(Ws)^2;
a=s^2+Ws^2;
b=s^2+Wie^2;
c=sin(L);
d=cos(L);
c11=s/a;
c12=0;
c13=s*g*Wie*c/a/b;
c14=c13;
c15=-g*(s^2+Wie^2*d^2)/a/b;
c16=-g*Wie^2*c*d/a/b;
mcVx1=ilaplace(c11*0.1);
mcVx3=ilaplace(c13*0.0005*pi/180);
mcVx4=ilaplace(c14*20/3600*pi/180);
mcVx5=ilaplace(c15*20/3600*pi/180);
mcVx6=ilaplace(c16*5/60*pi/180);
mcVx1t=subs(mcVx1);
mcVx3t=subs(mcVx3);
mcVx4t=subs(mcVx4);
mcVx5t=subs(mcVx5);
mcVx6t=subs(mcVx6);
plot(t,mcVx1t);title('mcVx0对mcVx的影响');xlabel('时间t');ylabel('mcVx(t)');grid;
figure
(2);
plot(t,mcVx3t);title('mcL0对mcVx的影响');xlabel('时间t');ylabel('mcVx(t)');grid;
figure(3);
plot(t,mcVx4t,'g*',t,mcVx5t,'g+',t,mcVx6t,'g-');
legend('anglex0-mcVx','angley0-mcVx','anglez0-mcVx');
title('初始水平姿态角,方位姿态角对mcVx的影响');xlabel('时间t');ylabel('mcVx(t)');grid;
分析:
δVx0对δVx只有舒乐周期震荡的影响;δL0对δVx有地球自转周期和舒乐周期震荡两个方面的影响;φx0,φy0,φz0对δVx有地球自转周期和舒乐振荡周期的影响,且φy0产生的影响最大。
2.δVx0,δVy0,δL0,φx0,φy0,φz0对δVy的影响
symss;
t=1:
0.01:
25;
g=9.8;
L=pi/180*39;
Ws=2*pi/84.4*60;
Wie=2*pi/24;
R=g/(Ws)^2;
a=s^2+Ws^2;
b=s^2+Wie^2;
c=sin(L);
d=cos(L);
c21=0;
c22=s/a;
c23=-g*Wie^2/a/b;
c24=s^2*g/a/b;
c25=s*g*Wie*c/a/b;
c26=-s*g*Wie*d/a/b;
mcVy2=ilaplace(c22*0.1);
mcVy3=ilaplace(c23*0.0005*pi/180);
mcVy4=ilaplace(c24*20/3600*pi/180);
mcVy5=ilaplace(c25*20/3600*pi/180);
mcVy6=ilaplace(c26*5/60*pi/180);
mcVy1t=subs(mcVy1);
mcVy3t=subs(mcVy3);
mcVy4t=subs(mcVy4);
mcVy5t=subs(mcVy5);
mcVy6t=subs(mcVy6);
plot(t,mcVy1t);title('mcVy0对mcVy的影响');xlabel('时间t');ylabel('mcVy(t)');grid;
figure
(2);
plot(t,mcVy3t);title('mcL0对mcVy的影响');xlabel('时间t');ylabel('mcVy(t)');grid;
figure(3);
plot(t,mcVy4t,'.',t,mcVy5t,'+',t,mcVy6t,'-');
legend('anglex0-mcVy','angley0-mcVy','anglez0-mcVy');
title('初始水平姿态角,方位姿态角对mcVy的影响');xlabel('时间t');ylabel('mcVy(t)');grid;
分析:
δVy0对δVy只有舒乐周期震荡的影响;δL0对δVy有地球自转周期和舒乐周期震荡两个方面的影响;φx0,φy0,φz0对δVy有地球自转周期和舒乐振荡周期的影响,且φx0,φz0产生的影响较大。
3.δVx0,δVy0,δL0,φx0,φy0,φz0对δL0的影响
symss;
t=1:
0.01:
25;
g=9.8;
L=pi/180*39;
Ws=2*pi/84.4*60;
Wie=2*pi/24;
R=g/(Ws)^2;
a=s^2+Ws^2;
b=s^2+Wie^2;
c=sin(L);
d=cos(L);
c31=0;
c32=1/a/R;
c33=s/a;
c34=s*Ws^2/a/b;
c35=Ws^2*Wie*c/a/b;
c36=-Ws^2*Wie*d/a/b;
mcL2=ilaplace(c32*0.1);
mcL3=ilaplace(c33*0.0005);
mcL4=ilaplace(c34*20/3600);
mcL5=ilaplace(c35*20/3600);
mcL6=ilaplace(c36*5/60);
mcL2t=subs(mcL2);
mcL3t=subs(mcL3);
mcL4t=subs(mcL4);
mcL5t=subs(mcL5);
mcL6t=subs(mcL6);
plot(t,mcL2t);title('mcVy0对mcL的影响');xlabel('时间t');ylabel('mcL(t)');grid;
figure
(2);
plot(t,mcVy3t);title('mcL0对mcL的影响');xlabel('时间t');ylabel('mcL(t)');grid;
figure(3);
plot(t,mcL4t,'.',t,mcL5t,'+',t,mcL6t,'-');
legend('angleX0-mcL','angley0-mcL','anglez0-mcL');
title('初始水平姿态角,方位姿态角对mcL的影响');xlabel('时间t');ylabel('mcL(t)');grid;
分析:
δVy0对δL只有舒乐周期震荡的影响;δL0对δL有地球自转周期和舒乐周期震荡两个方面的影响;φx0,φy0,φz0对δL有地球自转周期和舒乐振荡周期的影响,且φz0产生的影响较大。
4.δVx0,δVy0,δL0,φx0,φy0,φz0对φx的影响
symss;
t=1:
0.01:
25;
g=9.8;
L=pi/180*39;
Ws=2*pi/84.4*60;
Wie=2*pi/24;
R=g/(Ws)^2;
a=s^2+Ws^2;
b=s^2+Wie^2;
c=sin(L);
d=cos(L);
c41=0;
c42=-1/a/R;
c43=-s*Wie^2/a/b;
c44=s^3/a/b;
c45=s^2*Wie*c/a/b;
c46=-s^2*Wie*d/a/b;
anglex2=ilaplace(c42*0.1);
anglex3=ilaplace(c43*0.0005);
anglex4=ilaplace(c44*20/3600);
anglex5=ilaplace(c45*20/3600);
anglex6=ilaplace(c46*5/60);
anglex2t=subs(anglex2);
anglex3t=subs(anglex3);
anglex4t=subs(anglex4);
anglex5t=subs(anglex5);
anglex6t=subs(anglex6);
plot(t,anglex2t);title('mcVy0对abglex的影响');xlabel('时间t');ylabel('abglex');grid;
figure
(2);
plot(t,anglex3t);title('mcL0对anglex的影响');xlabel('时间t');ylabel('anglex');grid;
figure(3);
plot(t,anglex4t,'.',t,anglex5t,'+',t,anglex6t,'-');
legend('angleX0-anglex','angley0-anglex','anglez0-anglex');
title('初始水平姿态角,方位姿态角对anglex的影响');xlabel('时间t');ylabel('anglex');grid;
分析:
δVy0对φx只有舒乐周期震荡的影响;δL0对φx有地球自转周期和舒乐周期震荡两个方面的影响;φx0,φy0,φz0对φx有地球自转周期和舒乐振荡周期的影响,且φx0,φz0产生的影响较大。
5.δVx0,δVy0,δL0,φx0,φy0,φz0对φy的影响
clc;clearall;
symss;
t=1:
0.01:
25;
g=9.8;
L=pi/180*39;
Ws=2*pi/84.4*60;
Wie=2*pi/24;
R=g/(Ws)^2;
a=s^2+Ws^2;
b=s^2+Wie^2;
c=sin(L);
d=cos(L);
c51=1/R/a;
c52=0;
c53=-s^2*Wie*c/a/b;
c54=-s*Wie*c/a/b;
c55=s*(Wie^2*c*d)/a/b;
c56=s*Wie^2*c*d/a/b;
angley1=ilaplace(c51*0.1)


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 北航 惯性 导航 作业 任务
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 #2机组现场施工用电布置措施.docx
#2机组现场施工用电布置措施.docx
-
《个人贵金属质押借款合同》兴业银行.docx
-
《科学发展观和小康社会的经济建设》复习导学案.docx
-
《我和祖父的园子》第一课时教案两篇word.docx
-
《质量》教学案例与设计.docx
-
2惠农小册子.docx
-
7A版个人与团队模拟考试题及答案.docx
-
10篇新部编四年级下册语文课内外阅读理解专项练习题及答案.docx
-
16初四物理热和能知识点总结精讲.docx
-
20XX社会语言经典语录流行风暴.docx
-
48篇教学案例分析报告题.docx
-
《电子工厂安全管理制度汇总》.docx
-
《机械制造课程设计》指导.docx
-
《钱学森》教案第二课时.docx
-
《边城》读后感5篇.docx
-
《固定式压力容器安全技术监察规程》.docx
-
《论雷峰塔的倒掉》.docx
-
《手术台就是阵地》教学设计三年级语文下册.docx
-
《夏洛的网》课外阅读教学设计.docx
-
《自己的花是让别人看的》教案.docx
-
3C检查表090429.docx
-
7客运专线CRTSⅡ型板式无砟轨道施工工法.docx
-
《笔算除法》课时教案设计.docx
-
11#楼高大模板支撑体系专项方案.docx
-
17科学分析经济形势.docx
-
《电流和电路》易错题精讲综合检测题与答案.docx
-
《会计信息系统》习题含答案.docx
-
《汽车电器设备与维修》发电机分教考分离试题及标准答案.docx
-
《四川省排污许可证管理暂行办法》.docx
-
《新编实用英语》教案第一册Unit.docx
-
0母版锅炉值班员计算题WORD版.docx
-
3年级下册英语单词记忆人教版.docx
-
留学职业规划职业规划六篇.docx
-
旅游对环境的影响文献综述.docx
-
六层小区住宅楼砖混结构施工组织设计实例.docx
-
教师资格初中数学教案.docx
-
人教版小学三年级语文上册知识点归纳汇总.docx
-
教学编制问题c语言数据结构实现.docx
-
如何把握文章结构理清作者的写作思路.docx
-
旅行社实习的自我鉴定5篇.docx
-
软件工程国家标准doc.docx
-
届高三语文新课标一轮复习阶段检测题02Word版含答案.docx
-
石河子大学化学化工学院高分子化学期末考试试题.docx
-
届河南省郑州市思齐实验中学高三月考历史试题及答案.docx
-
食品食材配送售后服务方案26p.docx
-
秘书写作课程标准.docx
-
金色的草地教案精选多篇.docx
-
嵌入式课程设计.docx
-
市场营销管理方案.docx
-
青岛国开实验高中化学必修二第五章《化工生产中的重要非金属元素》经典测试题答案解析.docx
-
美国五次并购浪潮.docx
