 半主动悬架设计.docx
半主动悬架设计.docx
- 文档编号:27883369
- 上传时间:2023-07-06
- 格式:DOCX
- 页数:14
- 大小:335.23KB
半主动悬架设计.docx
《半主动悬架设计.docx》由会员分享,可在线阅读,更多相关《半主动悬架设计.docx(14页珍藏版)》请在冰豆网上搜索。
半主动悬架设计
悬架历史:
随着世界经济、科技水平的发展,人们对汽车的要求也越来越高,因此生产即安全又舒适的高性能汽车成为汽车工业发展的新方向。
而作为汽车重要
组成部分的悬架,其性能的优越直接影响车辆的安全性和舒适性。
因此,悬架的
发展先后经历了被动悬架、主动悬架的演变过程。
然而,由于被动悬架本身结构的限制,其性能相对较差;主动悬架结构复杂、制造成本较高,在商业上也没能得到广泛应用。
后来,人们提出了介于前两种悬
架之间的半主动悬架,它既有被动悬架结构简单、成本低廉,又有主动悬架的优越性能,因此,受到人们的广泛关注。
组成:
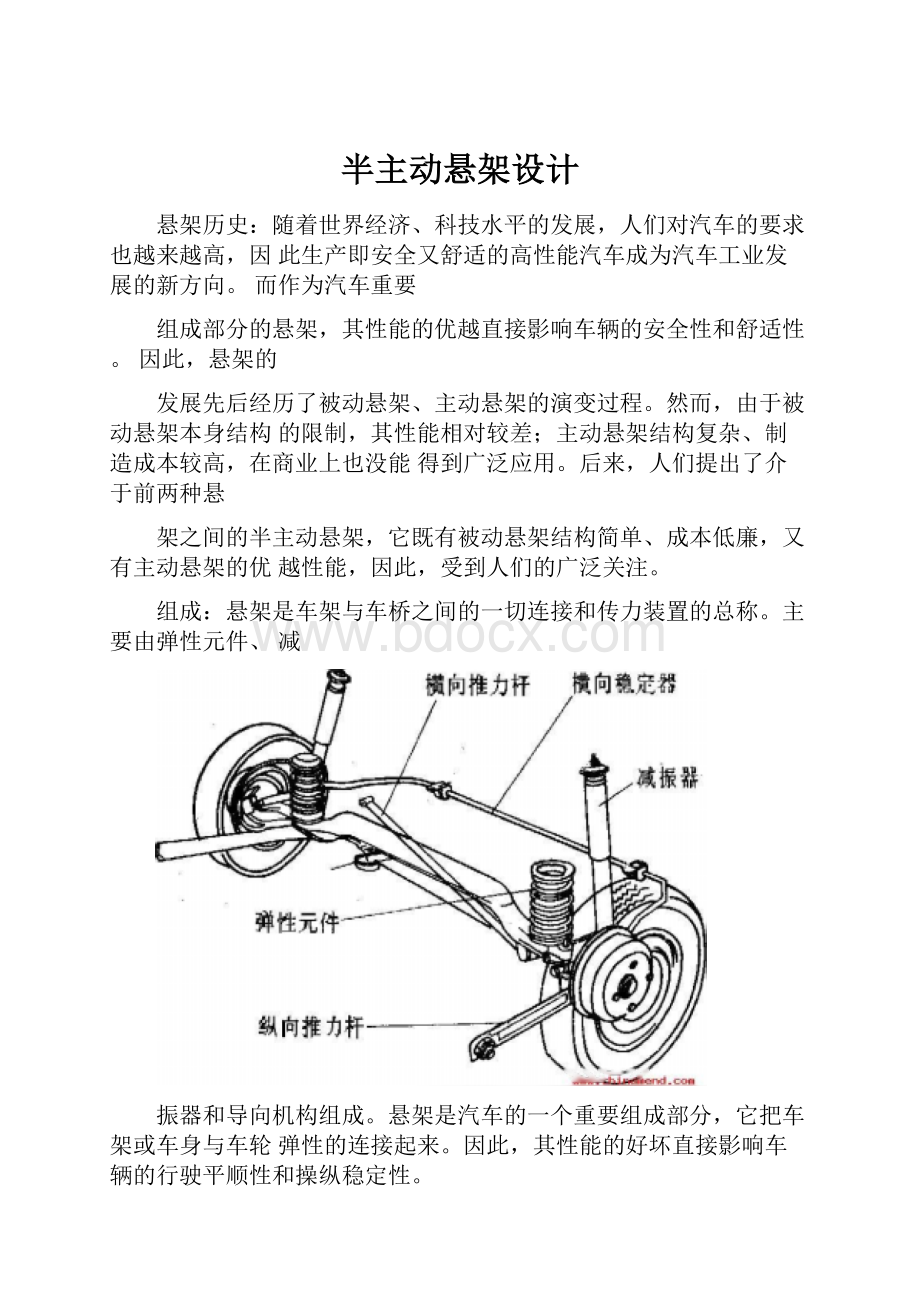
悬架是车架与车桥之间的一切连接和传力装置的总称。
主要由弹性元件、减
振器和导向机构组成。
悬架是汽车的一个重要组成部分,它把车架或车身与车轮弹性的连接起来。
因此,其性能的好坏直接影响车辆的行驶平顺性和操纵稳定性。
其总体结构如图1.1所示。
f-r
悬架按导向机构、弹性元件和阻尼元件不同,可分成不同的悬架类型。
以阻尼元件为例,按阻尼元件的不同,可以分成固定阻尼系数的悬架和可变阻尼系数的半主动悬架两种。
本文就是以可变阻尼系数的半主动悬架为例进行研究的。
按其发展过程来讲,悬架先后经历被动悬架、主动悬架和半主动悬架三种悬架的发展历程。
迄今为止,被动悬架发展历史最悠久,性能比较稳定、技术相对成熟,更兼结构简单、制造成本低廉,因此,仍在各种车辆上广泛应用。
但其弹性和阻尼不能随外部工况变化而变化,已经远不能满足人们对乘坐舒适性和安全性的要求。
随着计算机技术的发展和传感器、微处理器及液、电控元件制造技术的提高,使可控悬架在车辆上的应用成为可能。
半主动悬架:
半主动悬架是指悬架弹性元件刚度和减振器阻尼力之一或两者均可根据需要进行捌节的悬架。
由于半主动悬架在控制品质上接近于主动悬架,且结构简单,能量损耗小,成本低,因而具有巨大的发展潜力。
1半主动悬架技术发展现状根据悬架的阻尼和刚度是否随着行驶条件的变化而变化,可将悬架分为被动悬架、半主动悬架和主动悬架。
随着生活水平的不断提高,用户对汽车舒适性的要求也越来越高,传统的汽车悬架系统已不能满足人们的要求。
人们希望汽车车身的高度、悬架的刚度、减振器的阻尼大小能随汽车行驶速度以及路面状况等行驶条件的变化而自动调节,从而实
现乘坐舒适性的提高。
1973年,美国加州大学戴维斯
分校学者的D•A•Cr0Sb丫和D.C.Kamopp首先提出了半主动悬架的概念。
其基本原理是:
用可调刚度弹簧或可调阻尼的减振器组成悬架,并根据簧载质量的加速度响应等反馈信号,按照一定的控制规律调节弹簧刚度或减振器的阻尼,以达到较好的减振效果。
半主动悬架分为刚度可调和阻尼可调两大类。
目前,在半主动悬架的控制研究中以对阻尼控制的研究居多。
阻尼可调半主动悬架又可分为有级可调半主动悬架和连续可调半主动悬架有级可调半主动悬架的阻尼系数只能取几个离散的阻尼值,而连续可调半主动悬架的阻尼系数在一定的范围内可连续变化。
半主动悬架的建模:
1:
可调减震器:
3.1可调阻尼减振器设计
有级可调减振器阻尼可在2〜3档之间快速切换,切换时间通常为10〜20ms。
有级可调减振器实际上是在减振器结构中采用较为简单的控制阀,使通流面积在大、中等和最小之间进行有级调节。
通过减振器顶部的电机控制旋转阀的旋转位置,使减振器的阻尼在“软、中、硬”三档之间变化。
有级可调减振器的结构及其控制系统相对简单,但在适应汽车行驶工况和道路条件的变化方面有一定的局限性。
1.2连续可调减振器
连续可调减振器的阻尼调节可采取以下两种方式。
1.2.1节流孔径调节
早期的可调阻尼器主要是节流孔可实时调节的油液阻器。
通过步进电机驱动减振器的阀杆,连续调节减振器节流阀的通流面积来改变阻尼,节流阀可采用电磁阀或其它形式的驱动阀来实现。
这类减振器的主要问题是节流阀结构复杂,制造成本高。
1.2.2减振液粘性调节使用黏度连续可调的电流变或磁流变液体作为减振液,从而实现阻尼无级变化,是当前的研究热点。
电流变液体在外加电场作用下,其流体材料性能,如剪切强度、粘度等会发生显著的变化,将其作为减震液,只需通过改变电场强度,使电流变液体的粘度改变,就可改变减振器的阻尼力。
电流变减振器的阻尼可随电场强度的改变而连续变化,无须高精度的节流阀,结构简单,制造成本较低,且无液压阀的振动、冲击与噪声,不需要复杂的驱动机构,作为半主动悬架的执行器是一个非常好的选择。
但电流变液体存在如,电致屈服强度小,温度工作范围不宽,零电场粘度偏高,悬浮液中固体颗粒与基础液体之间比重相差较大,易分离、沉降,稳定性差,对杂质敏感等问题。
要使电流变减振器响应迅速、工作可靠,必须解决以下几个问题:
设计一个体积小、重量轻、能任意调节的高压电源;为保证电流变液体的正常_T作温度,有一个散热系统;高压电源的绝缘与封装。
国外如德国Bayer公司和美国Lord公司都已有电流变减震器产品。
磁流变液体是指在外加磁场的作用下,流变材料性能发生急剧变化的流体。
通过控制磁场强度,可实现磁流变减振器阻尼的连续、无级调节。
磁流变减振器具有电流变减振器相似的特点,磁流变液是一种由细小的磁性颗粒悬浮于绝缘介质中形成的液体。
其黏度随着外加磁场强度的增加而递增,直至半固态,而一旦外加磁场消失,它又自行恢复原状,整个过程可在毫秒级时间内完成。
美国Lord公司、福特公司,德国BASF等纷纷投入巨资进行了研究,女吐ord公司开发的磁流变液MRX-I26PD,采用单出杆活塞缸结构设计的磁流变减振器已用于大型载重汽车半主动悬架减振系统。
电流变液与磁流变液的特性如表1所示。
它们都能满足汽车工作要求。
但在屈服应力、温度
范围、塑性粘度和稳定性等性能方面,磁流变液体强于电流变液体。
早期的可调阻尼器主要是节流孔可实时调节的油液阻尼器。
通过步进电机驱动减振器的阀杆,连续调节减振器节流阀的通流面积来改变阻尼,节流阀可采用
电磁阀或其它形式的驱动阀来实现。
这类减振器的主要问题是节流阀结构复杂,制造成本高。
3.2可调阻尼减振器特性试验
试验在MT公司生产的850SHOOKABSORBERTESTSYS进行,试验时,将可调阻尼减振器的阻尼分成8级,分别代表可调阻尼减振器的步进电动机转过12。
、24。
、36。
、48。
、60。
、72。
、84。
、96。
,采用正弦波作为输入,分别得到8种工况下拉伸与压缩过程中的示功图(图2)以及速度特性图(图3)。
JO
2.0
10
10"
10
.O
0jf
—£和一叔0400帰,
图3可诡阴尼减振器Twiir时的逋度特性
试验结果表明,设计的可调减振器在5种激振频率下的示功图饱满、圆滑,基本没有空行程和畸形;拉伸和压缩行程时,活塞的拉伸与压缩速度和阻尼力近似为线性关系,因此,这为半主动悬架阻尼控制模型建立时分析其速度特性提供了重要依据。
2半主动悬架控制策略
近年来,国内外学者对半主动悬架控制方法进行了大量的研究,控制方法几
乎涉及到所有的控制理论的所有分支,许多控制方法如天棚阻尼控制、PID控制、最优控制、自适应控制、神经网络控制、滑模变结构控制、模糊控制
等在半主动悬架上得到了应用。
2.1天棚阻尼控制
天棚阻尼控制方法是最早提出的控制方法。
该控制方法是由美国D.KARNOPP教授提出,在早期的半主动悬架上得到了广泛应用,但天棚阻尼控制只解决了悬架系统的舒适性而没有很好解决操纵稳定性问题。
因此,目前研究的重点是改进型的天棚阻尼控制方法。
2.2最优控制
最优控制是一种理论上最成熟、应用最广泛的控制方式,它一般可分为线性最优控制、最优预测控制和H00最优控制。
线性最优控制是将LQ(Linear—Quadratic)控制理论应用于车辆悬架系统中,其性能指标函数采用系统的状态响应与输入的加权二次型,在保证受控结构动态稳定性的条件下,把线性二次型调节控制器理论和线性二次高斯型控制理论用于车辆半主动悬架系统中实现最优控制。
Hoo最优控制是在闭环系统各回路稳定的条件下,相对于噪声干扰的输出取极小值的一种最优控制方式,在车身质量、轮胎刚度、减振阻尼系统、车辆结构等存在不确定变化误差时,采用Hoo最优控制可使车辆悬架系统的减振控制具有较强的鲁棒性。
2.3自适应控制
自适应控制具有参数辨识功能,能适应悬架载荷和元件特性的变化,自动调整控制参数,保持其性能最优。
应用于车辆悬架系统自适应控制方法主要有模型参考自适应控制和自校正控制两类,其中自校正控制是目前应用较广的一类。
采用自适应控制的车辆悬架阻尼减振系统改善车辆的行驶特性,在德国大众汽车公司的底盘得到了应用。
2.4预测控制
车辆悬架系统的预测控制是指通过传感器将车辆前方路面信息预先传给悬架装置,使参数的调节与实际需求同步。
预测控制可以通过某种方法提前测得前方路况的信息,使得控制系统有足够的时间采取措施。
预测控制可以分为两类:
一是用前轮悬架的状态信息对后轮悬架进行预测控制;二是测量车辆行驶过程中前方道路的状态信息,以此信息来对前后轮悬架进行预测控制。
采用预测控制的关键是要获得具有一定精度、不受干扰和反映路面真实情况的信息。
2.6滑模变结构控制滑模变结构控制是控制理论的一个重要分支。
它适用于线性或非线性系统,方法简单,易于实现,对模型参数的不确定性和外界扰动具有高度的鲁棒性。
滑模变结构控制本质上是一类特殊的非线性控制,其非线性表现为控制的不连续性,这种控制策略与其它控制的不同之处在于系统的“结构”并不固定,而是可以在动态过程中根据系统当前的状态(如偏差及其各阶导数等)有目的地不断变化,迫使系统按照预定“滑动模态”的状态轨迹运动,由于滑动模态可以进行设计且与对象参数及扰动无关,这就使得变结构控制具有快速响应、对参数变化及扰动不灵敏、无需系统在线辩识,物理实现简单等优点。
2.7模糊控制
自20世纪90年代以来,模糊控制被应用到汽车半主动悬架系统的控制中。
模糊控制是一种新型智能控制技术,与传统控制相比,其系统的鲁棒性好,尤其适用于非线性、时变和滞后系统。
它的最大特点是允许控制对象没有精确的数学模型,使用语言变量代替数字变量,与人的智能行为相似,由于车
辆的部分参数经常变化以及在不同道路条件下行驶等特点,模糊控制尤为使用。
2.5神经网络
神经网络是近20年来迅速发展起来的一门新兴交叉学科,它是以大量处理单元(神经元)为节点,按某种拓扑结构所构成的高度并行的非线性动力学系统,其特点是具有自学习能力和大规模并行处理的能力,因而在车辆悬架系统减振控制中有着广泛的应用前景。
目前,神经网络控制方法越来越多地应用在特定环境以及采用固定描述方式的多种目的的设计中。
汽车半主动悬架系统具有非线性特点,常规的控制策略对非线性系统有一定的局限性,神经网络的控制方法在车辆悬架控制系统中有着广泛的应用前景
建立神经网络控制:
其控制线路图如图所示
为了评价神经网络控制结构的
性能,这里建立如下评价方法【4】
丿=£心严+捋】⑹
式中J—评价函数的综合指标
X,-Xd—车轮动位移
x2——车身加速度
q―车轮动位移的加权系数
则神经网络控制半主动悬架评价函数为
J{nr)=-(⑴+Xi(IT)](7)
式(7)的值得到了降低,在一定程度下说明车辆性能得到了较好地协调,这是神经网络训练的目的,因此,可按照梯度下降学习法,反求神经网络的参数即可实现。
对神经网络参数求偏导,反求神经网络的参数,即应用BP算法的反向过程.
令
1*1
-XZ(X(/T),cfGT))=J(nT)⑻
n*•!
/(XW).cfT))二忒帥门+
吐妙兀(們_©£^尢(,•门i
加2马」
式中X=[x,-x0Xj-X,X)X2]T
T—采样时间
将式(7)对神经网络参数求偏导御权重更新函数az丁、a/(«r)
Au “Mp/a“),q(i7i)ara7)|n亂aror)亦07) dl(X(iT\cSiT))dcAiT) (9) dct(iT)dw(iT) 式中A——神经网络训练步长阈值更新函数 ^b(nT)= db{nT) (10) “ai(x(iT)c(iT”ax(*T)+"7亂~dX(iT)-db(iT)dcT(iT)db(iT)由式 (2)可得 如兀(厅)4■◎空^也“巧一. 5型出⑷(12) 式⑴)和式(1习中的各项可以由式⑼分别■«导 求得* 根据師愷式洌络BP釁法的條1E权值公式.进 行神经网络枚1ft和陶血更新上 权重更新 WJ«H+1)7)*两厅Au 阚值展新 帆5+on二b[nT)*站01巧(14) 因此,半主动悬架的神经网络直接学习算法可归纳为: ①训练样本的采集;将控制阻尼Cr初始化为0,选择合适的路面 输入,运行半主动悬架模型,得到用于神经网络训练的初始甩对样本(葺,墨),并输出状态矢量x的数据。 ②计算被动悬架性能指标,并设定神经网络训练终止条件。 ③反求神经网络参数。 ④更新神经网络参数。 ⑤运行神经网络控制模型(正向计算过程)和半主动悬架模型,采集新的训练数据和状态矢量数据。 ⑥计算半主动悬架评价函数,并判断是否达到了神经网络训练的终止条件,如果达到了,则结束训练过程, 保存神经网络参数,否则返回第③步继续训练。 5.2半主动悬架的仿真计算 基于建立的半主动悬架模型和直接学习神经网络控制模型, 利用Matlab5.3+Simulillk3.0+T001b—oox进行了仿真(计 算结果见图5和表),仿真采用4阶Runge—Kutta法,步长为O.02s,可调阻尼Cr=1000〜2000N•s/m可调阻尼减振器试验拉伸阻尼范围为0.75〜2.14kN•s/m考虑到仿真试验的需要,仿真试验时对可调阻尼范围进行了适当放大,计算时的l/4车辆模型参数为: M1=30Kg,M2=220Kg,Kl=200000N/mK=20KN/mC0=1470N*s/m分别以正弦波、线性增加的扫频波(f=0〜20Hz)和滤波白噪声作为路面输入进行仿真。 结果表明,对于频率为5Hz的正弦波路面激励信号输入,车身加速度和车轮动载荷得到了较大的改善,而这一频率的信号正是人体比较敏感的垂直振动信号,而采用直接学习方法的神经网络控制器在人体反映敏感的频带性能优良,较好地改善车辆的乘坐舒适性和行驶安全性;对于扫频波路面速度激励信号输入,半主动悬架较好地协调了车辆的性能,在人体反映敏感的频带,车身加速度得到了很好的控制,在高频共振区,该神经网络控制效果有所减弱: 对于滤波白噪声路面速度激励信号输入,在保证行驶安全性(车辆动载荷和悬架动挠度)的同时,乘坐舒适性得到了一定的提高。 仿真计算结果如下图 %伽心'、 忌代・•■旳 心血“ 号SI初SMC時值 d■斗cum 斗Jt祸*t團 氐恨 FUifl•粘 fm 3.W35 60»5 I2J 4I.J lt$4J 1WJ nwe 半左£想架 2.C101 1 U2 1SJ koiU m «-2&ik nn>c7fl 297^. 732^1 2JW3 3.«}0 lae mi? 華1■刮銀節 1*124 241^4 iii Z2Z d WO 33.那1 吟,36*斫 43知 卿附;1 31 MU 3S7 KUU L比昼 3L4如 72H* ? W.3 27*1』 fitf 1.1^42 SJ5J3 Ml 22 M15 2163J 鼻架ttX整 2M5J — 映,4 JJiM ]砧叫 10.I3H.1 9-5* <163»4t 1215M IS2I%1 1143%! — — 121%H ]ZIO%J 以1/4悬架1: 1物理模型进行了台架试验【51,部分试验结果如表所示。 结果表明,半主动悬架的减振效果明显,且车辆动载荷得到一定限制,控制系统工作正常,满足控制要求。 试验还在其他工况下进行,得出的结论与此相似。 第四章阻尼控制模型 半主动悬架由弹性元件和可调阻尼减振器组成,以 上试验研究及分析表明[2]: 阻尼力与簧载及非簧载质量的相对速度成正比,其阻尼力为 E=%(初一和*务虽-A)⑴ 氏中<0一基值阻尼 4可调阻龙 菲簧载质童及簧载质城的位移根据牛顿第二定隹,系统国运动微分方程为 码岳+局佃-j^)-cDfx2— q(对-左J-凤勺-^)=0叫禺*(乌—曲)亠口显―%” 式中氐——轮胎刚度 k——悬架弾賢刚度期】非贲©1质虽 rtii簧栽质罐 禺一车身加連度 “~制址 &佃-町)——车轮动载荷 壬-不——架动挠度 在主麺带内路11激励速度丸可近似处理为白噪声’即序二热⑴,取状鑫矢量X=[^-^旳一-J4)则悬架系统的控 制方程为 Y-CX 式中 0 0 -4,/m 0 lr -1 0 帚 0 c- -k/m2 0 0 J (e0+cf)/m2 01 0 fe>« -(c0+rr)/m3 0 — PC —5— %Model


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 主动 悬架 设计
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《贝的故事》教案4.docx
《贝的故事》教案4.docx
-
《对韵歌》优秀教案8.docx
-
《函数yAsinωx+φ+P图象》wwwnet.docx
-
《静夜思》教学设计.docx
-
《汽车底盘构造与维修》题库与考核标准.docx
-
《世说新语》复习资料.docx
-
《我的服装我做主》教案设计.docx
-
《在品味情感中成长》教学片断设计.docx
-
11造价员《建设工程造价管理基础知识》精讲教程文件.docx
-
《不会叫的狗》教案 人教部编版1.docx
-
《操作系统》二学期A卷及答案.docx
-
《傅雷家书》名著阅读笔记.docx
-
《反不正当竞争法》下互联网平台封禁行为考辨以消费者用户合法权益保护为中心.docx
-
《化工原理》第六章蒸发.docx
-
《蓝海战略》概要11页.docx
-
《人生》读书心得.docx
-
《荷叶圆圆》公开课教案优秀教学设计26.docx
-
《科技出行研究报告》智能网联与新能源将变革未来汽车出行.docx
-
《272 向量的应用举例》导学案1.docx
-
《秋天》评课稿.docx
-
《电算化》第二章会计电算化的工作环境章节练习.docx
-
《室外给排水管道》施组.docx
-
《广东省建筑与装饰工程综合定额》计算规则.docx
-
《我多想去看看》教学.docx
-
《直通车车手基础认证》 考试答案 70题之欧阳育创编.docx
-
7天销量翻10倍皇冠卖家教您玩转最精准流量.docx
-
9 阿长和山海经.docx
-
《比例尺》教案.docx
-
《菜根谭》注译四闲适篇.docx
-
《福尔摩斯探案集》读后感15篇.docx
-
《红对勾》古代诗歌选择题答案补充.docx
-
《课堂密码》读后感及心得精选多篇.docx
-
选修四第三章导学案doc文档格式.docx
-
硝基化合物的合成Word格式.docx
-
实 习 教 案 格 式 与 案 例Word格式.docx
-
Excel的高级筛选功能.docx
-
小学四年级英语上册牛津版全册教案文档格式.docx
-
关于停车场车库之立体车库细分市场可行性研究报告报批稿文档格式.docx
-
对梁占岩人物画的鉴赏与探究剖析Word文件下载.docx
-
高标准农田建设项目施工组织设计Word格式.docx
-
有哪些关于初中疫情防控宣传标语Word文档下载推荐.docx
-
五年级上册安全教育教案含教学计划Word文件下载.docx
-
Visual Basic实验文档格式.docx
-
乡镇XX年党建等五项工作落实情况汇报Word格式文档下载.docx
-
高考复习材料作文题库Word格式.docx
-
小学教育学复习资料Word格式.docx
-
幼儿园优质课大班教案《出生的秘密》Word格式文档下载.docx
-
XXX发电厂全厂停电事故应急预案Word文件下载.docx
-
管理思想史作业Word文件下载.docx
-
Fritz使用技巧.docx
-
小学班级特色活动总结精选5篇Word文档下载推荐.docx
