 KUKA简单操作说明书.docx
KUKA简单操作说明书.docx
- 文档编号:27845277
- 上传时间:2023-07-05
- 格式:DOCX
- 页数:16
- 大小:884.99KB
KUKA简单操作说明书.docx
《KUKA简单操作说明书.docx》由会员分享,可在线阅读,更多相关《KUKA简单操作说明书.docx(16页珍藏版)》请在冰豆网上搜索。
KUKA简单操作说明书
KUKA简单操作说明书
KUKA简单操作说明书
一、KUKA控制面板介绍
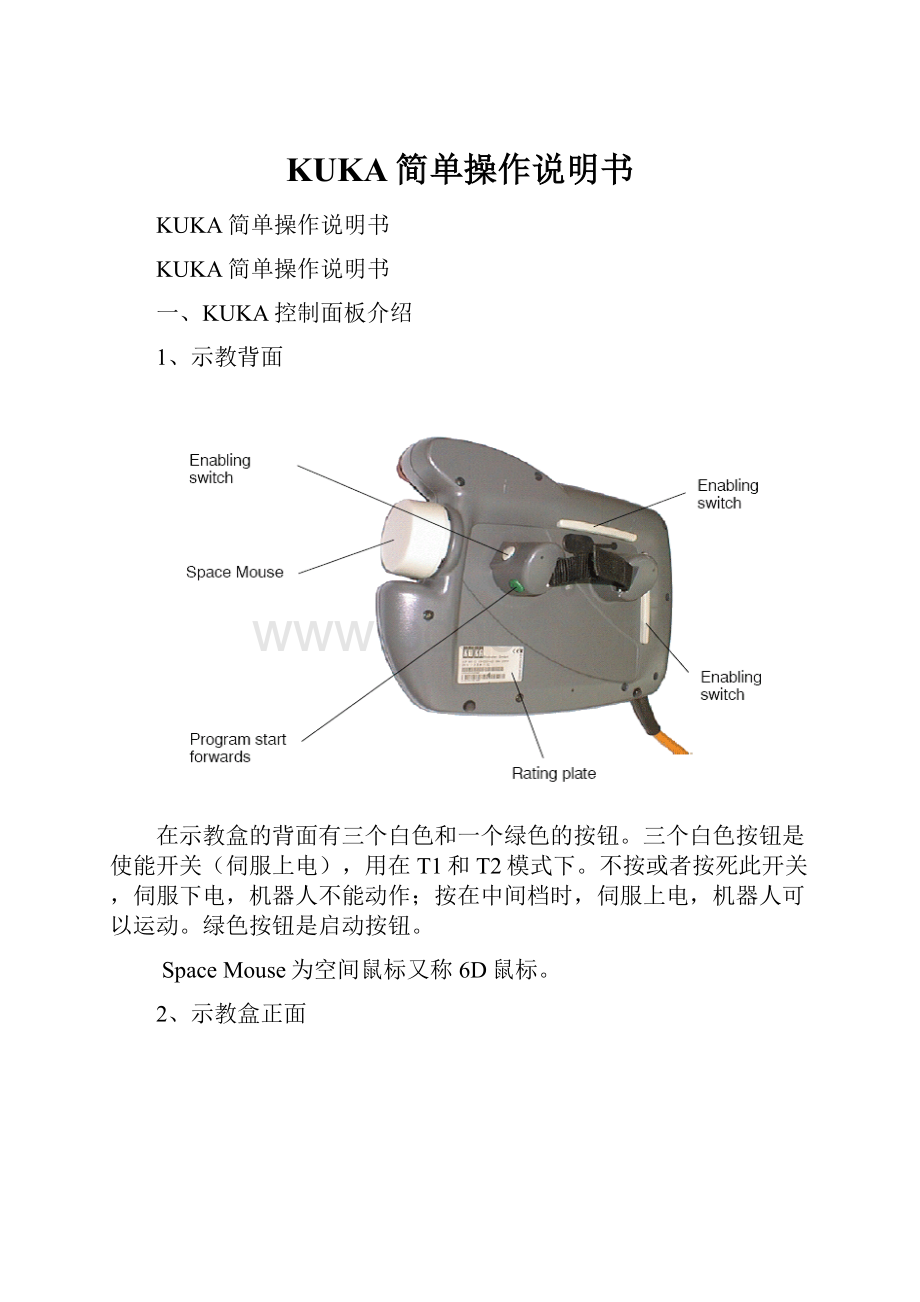
1、示教背面
在示教盒的背面有三个白色和一个绿色的按钮。
三个白色按钮是使能开关(伺服上电),用在T1和T2模式下。
不按或者按死此开关,伺服下电,机器人不能动作;按在中间档时,伺服上电,机器人可以运动。
绿色按钮是启动按钮。
SpaceMouse为空间鼠标又称6D鼠标。
2、示教盒正面
急停按钮:
这个按钮用于紧急情况时停止机器人。
一旦这个按钮被按下,机器人的伺服电下,机器人立即停止。
需要运动机器人时,首先要解除急停状态,旋转此按钮可以抬起它并解除急停状态,然后按功能键“确认(Ackn.)”,确认掉急停的报警信息才能运动机器人。
伺服上电:
这个按钮给机器人伺服上电。
此按钮必须在没有急停报警、安全门关闭、机器人处于自动模式(本地自动、外部自动)的情况下才有用。
伺服下电:
这个按钮给机器人伺服上电。
模式选择开关:
T1模式:
手动运行机器人或机器人程序。
在手动运行机器人或机器人程序时,最大速度都为250mm/s。
T2模式:
手动运行机器人或机器人程序。
在手动运行机器人时,最大速度为250mm/s。
在手动运行机器人程序时,最大速度为程序中设定的速度。
本地自动:
通过示教盒上的启动按钮可以使程序自动运行。
外部自动:
必须通过外部给启动信号才能自动执行程序。
退出键:
可以退出状态窗口、菜单等。
窗口转换键:
可以在程序窗口、状态窗口、信息窗口之间进行焦点转换。
当某窗口背景呈蓝色时,表示此窗口被选中,可以对这个窗口进行操作,屏幕下方的功能菜单也相应改变。
暂停键:
暂停正在运行的程序。
按“向前运行”或“向后运行”重新启动程序。
向前运行键:
向前运行程序。
在T1和T2模式,抬起此键程序停止运行,机器人停止。
向后运行键:
向后运行程序。
仅在T1和T2模式时有用。
回车键:
确认输入或确认指令示教完成。
箭头键:
移动光标。
菜单键:
用菜单键打开相应菜单,通过箭头键选择子菜单,回车键使选中的菜单被应用。
用退出键退出打开的菜单。
状态键:
选择机器人的操作状态。
软键:
选择并应用屏幕下方显示的功能。
数字键:
NUM键:
数字键上有第二功能,此键可以在数字和数字键上的第二功能之间进行转换。
键盘建:
3、状态键
(1)手动操作模式
表示不能手动。
要想手动移动机器人,必须将这个图标改变成以下两个图标。
用6D鼠标移动机器人。
用加减键移动机器人。
按相应的状态键,这三个图标将会依次转换。
(2)程序运行模式
按下启动键后,程序一直运行,直到启动键抬起或者暂停键被按。
按下启动键后,程序运行到下一条运动指令停止,中间如果启动键抬起或者暂停键被按,程序也将停止。
按下启动键后,程序运动到下一行停止,即使是空白行也运行。
按相应的状态键,这三个图标将会依次转换。
(3)设置程序速度
此键用来设置程序速度。
按“加”键,顺序依次是3%—>10%—>30%—>50%—>75%—>100%。
按菜单:
配置—>手动移动—>程序速度开关,将菜单前的对勾去掉后,按“加”键,速度只增加1%。
(4)机器人移动距离设置
伺服上电后,按住“+”“-”键,机器人将一直运行,直到加减键抬起或伺服下电。
伺服下电,按减键可以设置机器人移动的距离为100mm、10mm、1mm、0.1mm。
也就是说,伺服上电,按住“+”“-”键,机器人运行100mm后停止,想要继续移动机器人,需要再次按住“+”“-”键。
(5)坐标系选择
四个坐标系依次是:
世界坐标系、基础坐标系、工具坐标系、关节坐标系。
按“+”“-”键四个坐标系依次转换。
(6)手动速度
手动移动机器人时的速度百分比。
仅在T1和T2模式下有用。
最大手动移动速度为250mm/s。
显示10%时的含义是,手动运行机器人的速度为250×10%。
(7)
主要用于指令中参数的确认上。
当某参数获得光标时,可以用这个键选择该参数的值。
4、屏幕
Messagewindow
屏幕由三个窗口组成:
程序窗口、状态窗口、信息窗口。
一般状态窗口不出现。
用窗口选择键可以将光标在三个窗口之间转换。
(1)信息
信息窗口有五种信息。
通知信息:
主要是提示操作者下一步将要做什么。
可以通过“确认”
键确认掉的信息。
不影响机器人的运行。
等待信息:
表示某操作正在进行还没有结束。
对话信息:
询问操作者是否进行该操作。
状态信息:
提示机器人目前所处的状态。
如果不改变机器人的这种状态,这个信息不会消失也不能被“确认”;当改变了机器人的状态,这个信息自动消失,并出现下面的相应的确认信息。
确认信息:
确认信息是状态信息的后续信息。
确认信息通过“确认”键确认掉以后才可以运行机器人。
(2)状态行
在信息窗口和屏幕下方的功能键之间有一行状态行,状态行显示机器人当前所处的运行状态。
黑色表示数字键可用,灰色表示数字键不可用,数字键上的第二功能可用。
黑色表示输入大写字母,灰色表示输入小写字母。
绿色表示后台程序运行正常,灰色表示没有选择后台程序,黑色表示后台程序停止运行。
绿色表示伺服上电,红色表示伺服下电。
黄色表示程序已经选择,绿色表示程序正在运行,红色表示程序停止,灰色表示没有选择程序,黑色表示程序运行完成。
显示被选择的程序名。
当前正在执行程序的那一行。
当前机器人所处的运行模式。
显示程序速度。
Paul表示机器人的名字。
以直线运动为例。
打开程序,将机器人移到示教位置,把编辑光标移到将要插入运动指令的前一行,如果是程序的第一条指令,要插入在PTPHOME和PTPHOME之间。
按软键“运动”,程序窗口内出现运动指令的内嵌窗口。
如果不需要修改参数,按回车指令被记录,同时示教点被记录到P1。
如果需要修改参数,用箭头键将光标移到想要修改的参数上进行修改。
“指令退出”软键取消运动指令的记录。
光标移到LIN上,按这个软键可以重新设定运动类型。
光标移到P1上,用右下角状态键可以选择已经用过的点。
当选择已经用过的点时需要注意,记录指令时,信息窗口会询问是否覆盖已有的点,可以根据情况选择是否覆盖。
还可以选择或修改工具坐标系和基础坐标。
光标移到CONT上,用状态键可以选择参数CONT或空白。
空白表示机器人会精确到达P1点,CONT表示机器人近似到达P1点,然后向P1点的下一点运行。
Vel表示到P1点的运动速度。
光标移到CPDAT1上,可以设置加速度、逼近距离、工具姿态等参数。
1、逻辑指令
逻辑指令有:
等待时间、等待信号、输出端。
按软键“逻辑”,出现逻辑指令的内嵌窗口,这种方式可以记录等待时间和等待信号指令。
要想用输出端指令,按菜单:
命令—>逻辑—>输出端,选择输出信号的方式。
逻辑指令选择好后,程序窗口内出现逻辑指令的内嵌窗口。
光标移到不同的位置,下放软键的操作也不同。
在等待信号指令中,可以同时等待多个信号,这些信号也可以做与或否操作。
在输出端指令中,用状态键
选择信号的TRUE或FALSE。
二、修改程序命令
需要修改程序指令时,将光标移到要修改的指令行开头,按软键“改变”,用箭头键将光标移到想要修改的参数上进行修改。
对于运动指令需要注意,如果需要修改点的位置,先将机器人移动到位,按“改变”,按“指令参数”,信息窗口出现对话信息,回答是即可。
三、
执行程序
用“选择”软键打开程序,用右上角状态键设定好程序速度,用左边状态键选择程序运行的方式。
如果是T1和T2模式下运行程序。
按住示教盒背面的使能开关+“向前运行”,程序运行过程中这两个键都不能松开。
如果是自动模式,用示教盒右上角的伺服上电按钮上电,然后按“向前运行”,“向前运行”键不用一直按住。
注意:
在运行程序前需要进行BCOrun操作,即按住使能开关+“向前运行”,使机器人自动运行到黄色箭头所在行的位置。
此后,机器人将按照程序速度执行程序。
在自动模式运行前,需要在T1或T2模式下进行完BCOrun操作,才能自动运行程序。
在执行程序前,如果想要从程序中间某句开始运行,用“选择”打开程序,把I型编辑光标移到想要执行的行,按软键“句选择”,黄色箭头也会移到这一行,然后开始执行程序。
注意:
程序如果用“选择”打开,不用软键“退出”或重新选择其他程序,程序就没有退出,即使程序窗口没有显示程序内容,该程序也是被打开的,按启动键,该程序继续执行。
四、其他操作
1、进入专家界面
菜单:
配置—>用户组,相应状态窗口出现,按软键“专家”,输入密码“KUKA”,按回车,进入专家界面。
2、配置I/O
I/O配置需要进入专家界面。
菜单:
配置—>输入/输出驱动—>编辑输入/输出配置,进入iosys.ini文件,如果配置profibus,将PBMASL前的分号去掉,向下找到[PBMASL],将配置写在下面,关闭保存文件。
如果是devicenet,在[DEVNET]中配置。
菜单:
配置—>输入/输出驱动—>输入/输出驱动复位,相应状态窗口出现,选择Profibus按回车,状态窗口出现pfbms.ini文件名,光标移动到这个文件名上,按回车打开这个文件,在这个文件中可以设置profibus的一些选项。
如果是devicenet,可以在这里配置栈号、波特率。
以上两个文件设置好后,按菜单:
配置—>输入/输出驱动—>重新配置输入/输出驱动。
外部输入/输出配置,菜单:
配置—>输入/输出—>外部自动。
打开的是外部输入信号,按软键“输出端”,打开输出信号,按软键“Tab+”“Tab-”浏览下一页输出信号。
要修改信号,将光标移到该信号,按软键“值”,输入新的信号号码,按软键“OK”。
3、强制I/O
菜单:
显示—>输入/输出—>数字输入,相应状态窗口出现,光标移到要强制的信号上,按住示教盒背面的使能开关,当软键“值”由灰色变成黑色时,按此键,信号前的圆点由灰色变成红色表示强制成功。
按软键“输出端”可以进入输出信号界面。
4、强制冷启动
KUKA机器人有两种启动方式:
冷启动和热启动。
一般情况下,把控制柜电源打开,系统是热启动。
如果在系统关闭前选择菜单:
配置—>开/关选项—>强制冷启动,下一次系统就是冷启动。
5、机器人位置实时显示
菜单:
显示—>机器人位置—>直角关系,相应状态窗口出现,按软键“同轴关系”,可以显示各轴的角度。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- KUKA 简单 操作 说明书
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《贝的故事》教案4.docx
《贝的故事》教案4.docx
-
《对韵歌》优秀教案8.docx
-
《函数yAsinωx+φ+P图象》wwwnet.docx
-
《静夜思》教学设计.docx
-
《汽车底盘构造与维修》题库与考核标准.docx
-
《世说新语》复习资料.docx
-
《我的服装我做主》教案设计.docx
-
《在品味情感中成长》教学片断设计.docx
-
11造价员《建设工程造价管理基础知识》精讲教程文件.docx
-
《不会叫的狗》教案 人教部编版1.docx
-
《操作系统》二学期A卷及答案.docx
-
《傅雷家书》名著阅读笔记.docx
-
《反不正当竞争法》下互联网平台封禁行为考辨以消费者用户合法权益保护为中心.docx
-
《化工原理》第六章蒸发.docx
-
《蓝海战略》概要11页.docx
-
《人生》读书心得.docx
-
《荷叶圆圆》公开课教案优秀教学设计26.docx
-
《科技出行研究报告》智能网联与新能源将变革未来汽车出行.docx
-
《272 向量的应用举例》导学案1.docx
-
《秋天》评课稿.docx
-
《电算化》第二章会计电算化的工作环境章节练习.docx
-
《室外给排水管道》施组.docx
-
《广东省建筑与装饰工程综合定额》计算规则.docx
-
《我多想去看看》教学.docx
-
《直通车车手基础认证》 考试答案 70题之欧阳育创编.docx
-
7天销量翻10倍皇冠卖家教您玩转最精准流量.docx
-
9 阿长和山海经.docx
-
《比例尺》教案.docx
-
《菜根谭》注译四闲适篇.docx
-
《福尔摩斯探案集》读后感15篇.docx
-
《红对勾》古代诗歌选择题答案补充.docx
-
《课堂密码》读后感及心得精选多篇.docx
-
公立医院组织文化建设的主要问题及对策.docx
-
甘教版信息技术七年级上教案.docx
-
钢盖梁施工方案最终.docx
-
给排水及暖通专业监理工程师答辩汇总.docx
-
保洁服务合同.docx
-
股票入门基础知识股票名词解释.docx
-
高考历史一轮复习 精讲 马克思主义的诞生精品学案 必修1.docx
-
穿越500kV带电线路施工方案学习资料.docx
-
工程勘察设计费计价格10号.docx
-
高级英语阅读课文参考译文.docx
-
哈理工大学投标书.docx
-
北京天坛导游词讲解5篇.docx
-
高液限土路基填筑 施工技术方案.docx
-
关于机械专业的实习报告四篇.docx
-
春新版部编本三年级语文下册19 剃头大师教案+反思+课时练习及答案.docx
-
公开承诺书格式共6篇.docx
-
毕业典礼老师讲话演讲稿.docx
-
高考语文 作文备考素材集锦光明文艺评论.docx
-
翰文工程进度计划编制教程.docx
