 GPS考试重点.docx
GPS考试重点.docx
- 文档编号:2775262
- 上传时间:2022-11-15
- 格式:DOCX
- 页数:9
- 大小:59.63KB
GPS考试重点.docx
《GPS考试重点.docx》由会员分享,可在线阅读,更多相关《GPS考试重点.docx(9页珍藏版)》请在冰豆网上搜索。
GPS考试重点
考试重点
1,全球导航卫星系统(GlobalNavigationSatelliteSystem,GNSS)是一种空间无线电定位系统,包括一个或多个卫星星座,为支持预定的活动需要而加以扩大,可为地球表面、近地表和地球外空任意地点用户提供24小时三维位置、速率和时间信息。
其突出优点是经济实用。
2,卫星导航系统有两个核心组成部分:
(1),全球定位系统(由美国运行管理)*研究重点*
(2),全球轨道导航卫星系统即轨道导航系统(俄罗斯联邦运行管理)。
补充:
建设中的伽利略;中国的“beidou12”
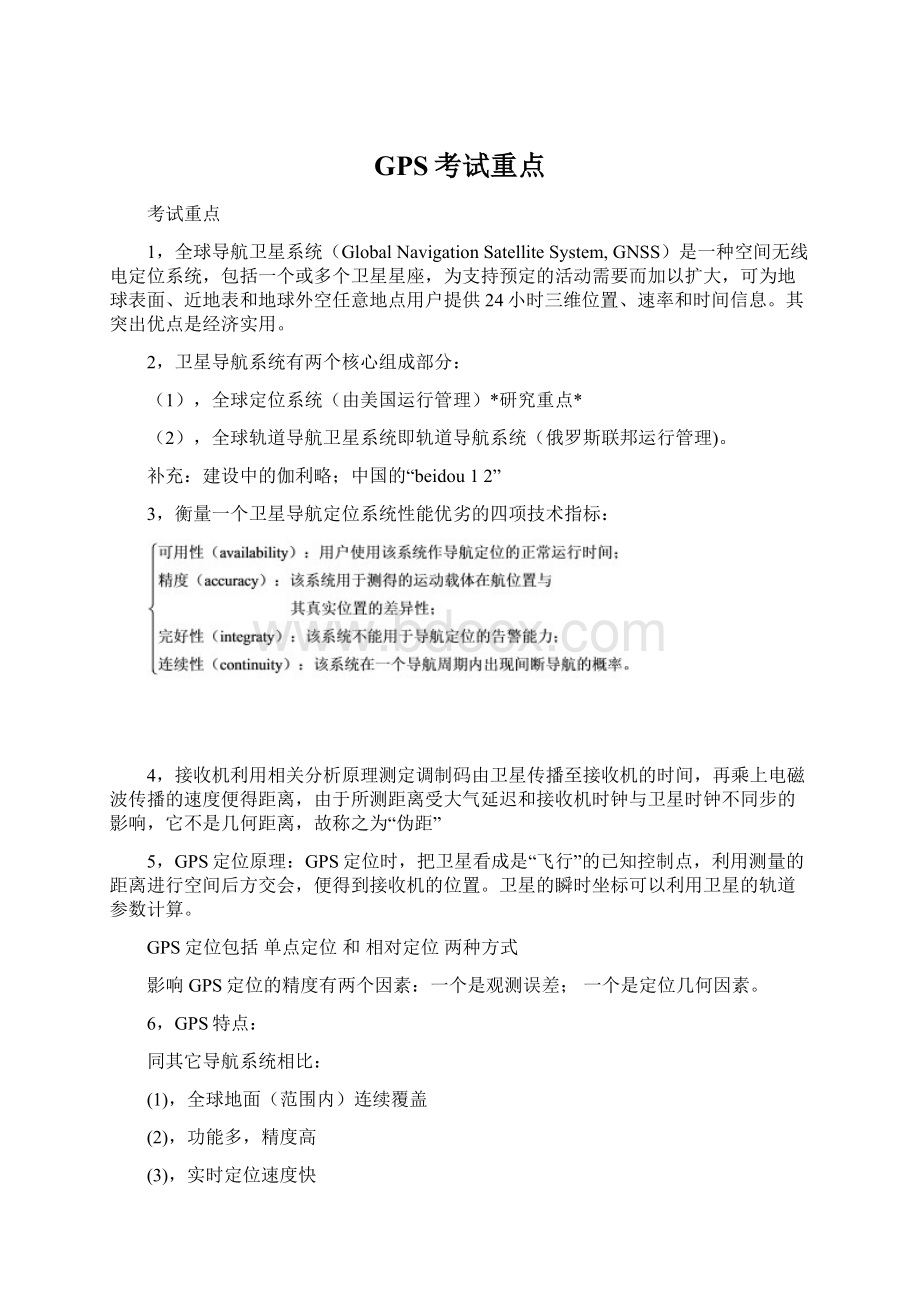
3,衡量一个卫星导航定位系统性能优劣的四项技术指标:
4,接收机利用相关分析原理测定调制码由卫星传播至接收机的时间,再乘上电磁波传播的速度便得距离,由于所测距离受大气延迟和接收机时钟与卫星时钟不同步的影响,它不是几何距离,故称之为“伪距”
5,GPS定位原理:
GPS定位时,把卫星看成是“飞行”的已知控制点,利用测量的距离进行空间后方交会,便得到接收机的位置。
卫星的瞬时坐标可以利用卫星的轨道参数计算。
GPS定位包括单点定位和相对定位两种方式
影响GPS定位的精度有两个因素:
一个是观测误差;一个是定位几何因素。
6,GPS特点:
同其它导航系统相比:
(1),全球地面(范围内)连续覆盖
(2),功能多,精度高
(3),实时定位速度快
(4),抗干扰性能好,保密性强
(5),静态定位观测效率高,应用广泛
相对于经典测量技术:
(1),观测站之间无需通视,但其上空仰角范围内不能有障碍物
(2),定位精度高
(3),提供三维坐标(注意平面和高程精度不一样啊!
)
(4),观测时间短,效率高
(5),操作简便,自动化程度高
(6),成本低,经济效益高
(7),全天候作业
7,美国政府的限制性政策:
(1)对不同的GPS用户,分别提供两种不同精度的定位服务
(2)实施选择可用性政策,即SA政策(于2000年5月1日取消)
(3)实施反电子欺骗防护措施,即A-S措施
限制性政策下非特许用户的应对策略:
一、建立独立的GPS测轨系统
二、研究、开发差分GPS(DGPS--DifferentialGPS)定位系统
三、建立独立的导航定位系统
四、开发GPS与GLONASS兼容接收机;开发GPS、GLONASS与Galileo相兼容接收机
8,讨论:
(1)SA政策取消的原因
(2)GPS、GLONASS、GALILEO和北斗导航(双星导航)将来的发展谁主沉浮?
?
(3)GPS能否代替常规仪器
9,GPS组成:
由三部分组成,空间部分;地面部分;用户部分
10,GPS卫星星座:
设计星座:
21+3;21颗正式的工作卫星+3颗活动的备用卫星;6个轨道面,平均轨道高度20200km,轨道倾角55,周期11h58min(顾及地球自转,地球-卫星的几何关系每天提前4min重复一次);保证在24小时,在高度角15以上,能够同时观测到4至8颗卫星
11,地面部分:
组成:
主控站(1个)、跟踪站(5个)和注入站(3个)
作用:
监测和控制卫星运行,编算卫星星历(导航电文),保持系统时间等。
12,地面监控系统工作流程:
13,开普勒轨道6参数或开普勒轨道6根数:
它们的大小取决于卫星的发射条件
为轨道椭圆长半轴
为轨道椭圆偏心率,这两个确定了开普勒椭圆的形状和大小
i为轨道面倾角
Ω为升交点赤经,这两个唯一地确定了卫星轨道平面与地球体之间的相对定向
s为近地点角距,表达了开普勒椭圆在轨道平面上的定向
Fs为卫星的真近点角
14,导航电文的主要内容:
它包含该卫星的星历(SatelliteVehicleEphemeris),卫星工作状况(SatelliteVehicleHeath),系统时间(SystemTime),时钟改正(ClockCorrectionParameters),轨道摄动改正(PerturbedOrbitCorrectionParameters),电离层时延改正即电离层折射参数(IonosphericDelayModelParameters),大气折射改正,由C/A码捕获P码的信息,卫星的概略星历等导航信息。
载波相位测量的基本观测方程:
设在标准时间为a,卫星钟读数为ta的瞬间,卫星发出的载波信号相位为(ta),该信号在标准时间b到达接收机。
根据波动方程,其相位应保持不变,即在标准时间b,读数为tb,接收机接收到的来自卫星的载波信号的相位为(ta),由接收机所产生的基准信号的相位为(tb),于是得:
=(R)-(S)=(ta)-(tb)ta=τa-vtatb=τb-vtb经过振荡器产生的信号的相位满足:
(t+Δt)=(t)+fΔt①,(tb)=(ta)+f(tb-ta)②,将②带入①得(tb)=(ta)+f(tb-ta)-(ta)=f(tb-ta)=~+N0
即~=f(tb-ta)-N0③,考虑大气改正带入整理得:
~=f/c(ρ-δρion-δρtrop)+fvta-fvtb-N0④
即为载波相位测量的基本观测方程。
线性化:
ρ是站星坐标的函数,设τa时刻卫星坐标为(x,y,z),τb时刻接收机坐标为(X,Y,Z),则站星的几何距离为:
ρ=[(x-X)2+(y-Y)2+(z-Z)2]½
引入近似值:
X=X0+VXY=Y0+VYZ=Z0+VZ,将在出用泰勒级数展开整理得:
ρ=ρ0-(X-X0)/ρ0vx-(Y-Y0)/ρ0vy-(Z-Z0)/ρ0vz⑤带入④得:
f/c(X-X0)/ρ0vx+f/c(Y-Y0)/ρ0vy+f/c(Z-Z0)/ρ0vz-fvta+fvtb+N0
=f/c(ρ-δρion-δρtrop)-0
上式中:
等号左边为未知参数,右边的各项均为已知值
基本观测方程及线性组合形式
单差:
在接收机间求一次差;消除了卫星钟差的影响
单差优点:
①消除卫星钟差的影响;②大大减弱星历误差及电离层、对流层折射的影响
双差:
在接收机、卫星间求二次差(单差之差);消去了接收机钟差的影响。
三差:
在接收机、卫星、历元间求差(双差之差)。
消去了整周未知数;
2.优点:
1)消除或减弱时钟、星历和大气折射误差的影响;
2)减少平差中不必要未知数的数量,减少法方程的阶数;
整周跳变(周跳):
Inti()是t0-ti时段的整周计数,如因某种原因使计数中断,则恢复计数后的观测值都包含有同一偏差,即中断期间丢失的整周数,这种现象,称为整周跳变,简称周跳。
产生原因:
①信号受阻(如树下观测);②仪器线路故障,无法正确计数;
③外界条件恶劣,无法锁定信号(失锁)。
周跳的探测与修复:
探测出何时发生周跳及丢失的整周数,对中断后的计数进行改正,将其恢复为正确计数,则观测值仍可应用。
这一工作称为周跳的探测与修复。
常用方法:
①高次差法;②在卫星间求差:
对小周跳可继续采用此法。
③从残差的分析中发现周跳
2.RTK系统的组成:
主要由一个基准站,若干个流动站、基准站和流动站间的通讯系统(数据链)及软件系统四部分组成。
RTK的基本工作原理:
是在两台接收机间加上一套无线电通讯系统,将相对独立的接收机连成一个有机的整体;基准站把接收到的伪距、载波相位观测值和基准站的一些信息(如基准站的坐标和天线高等)都通过通讯系统传送到流动站;
流动站在接收卫星信号的同时,也接受基准站传送来的数据并进行处理:
将基准站的载波信号与接收到的载波信号进行差分处理,即可实时求解出两站间的基线值,同时输入相应的坐标,转换参数和投影参数,即可求得实用的未知点坐标。
RTK优点:
①能在现场实时求解流动站的实用坐标,在20公里内定位精度达厘米级,且能实时知道定位的精度;②一个基准站可支持多个流动站同时工作,每个流动站仅需1人操作,大大提高了工作效率;③用于放样异常便捷,且精度高。
应用:
①控制测量的加密网:
如一、二级导线及图根测量,高效、经济、高精度地建立或改善城市和工程控制网;②各种工程测量,如地形测量、道路测设等;
③局部地区较高精度的实时导航定位,如船舶进港、飞机进场等。
RTK技术有着一定局限性,使得其在应用中受到限制,主要表现为:
①用户需要架设固定的参考站
①误差随距离的增加而增大——
③误差增长使流动站和参考站距离受到限制(<15KM)
④可靠性和可行性随距离增长而降低.
而VRS技术它将克服以上的局限性,扩展RTK的作业距离。
RTK系统的技术关键:
RTK系统之所以得以实现,其关键技术是:
快速准确的求解整周未知数及数据传输技术。
GPS网的连接方式有:
点连接、边连接、边点混合连接、网连接等。
1.点连接:
相邻同步环间仅有一个点相连接而构成的异步网图;
2.边连接:
相邻同步环间由一条边相连接而构成的异步环网图;
3.边点混合连接:
既有点连接又有边连接的GPS网;
NNSS的优点和局限性:
优点:
动态已知点的学说,
全球覆盖,
被动式定位。
局限性:
信号覆盖的区域有限;电磁波传播受大气影响,定位精度不够;技术滞后和设备陈旧。
难以适应现代航海、航空和陆地车辆的导航定位需要
WGS-84坐标系定义:
原点位于地球质心,Z轴指向BIH1984.0定义的协议地球极方向,X轴指向BIH1984.0的零子午面和CTP赤道的交点,Y轴与Z轴X轴构成右手坐标系。
对应于WGS-84大地坐标系有WGS-84椭球。
定位星座:
用GPS进行导航定位时,为了获得地面点的三维坐标,所必需观测的4颗卫星。
间隙段:
某时某地虽可观测四颗卫星,但是用其定位时,精度要比平时差,甚至不能解算该点的三维坐标,这个时间段为间隙段。
GPS的编号方式:
顺序编号:
按照GPS卫星发射时间的先后顺序对卫星进行编号
PRN编号:
根据GPS所采用的伪随机噪声码(PRN码)对卫星编号
IRON编号:
内部距离操作码,美国和加拿大组成的北美空军指挥部对卫星的编号
NASA编号:
美国航天局在文件中对GPS卫星的编号
国际识别号:
第一部分为发射年代,第二部分为发射卫星的序列号
导航电文的内容:
卫星的星历,卫星工作状况,系统时间,时钟改正,轨道摄动改正,电离层时延改正即电离层折射参数,大气折射改正,由C/A码捕获P码的信息,卫星的概略星历等导航信息。
广播星历:
通过卫星发射的含有轨道信息的导航电文传递给用户的,用户接收机接收到这些信息,经过解码便可获得所需要的卫星星历。
精密星历:
一些国家的某些部门根据各自建立的跟踪站所获得的精密观测数据,用于确定预报星历相似的方法计算的卫星星历,是哦后向用户提供在用户观测时间内的卫星精密轨信息,避免了预报星历外推的误差
时间延迟τ的测定:
卫星-自己时钟-发出某一结构的测距码-经∆t时间-接收机;
b)接收机-自己的时钟-产生一组结构完全相同的测距码(复制码)-时延器-延迟时间τ;
c)两组测距码-相关处理-自相关系数R(t)=1(两组对齐)-τ(复制码的延迟时间)=∆t(卫星信号的传播时间);
d)∆t*c=卫星至接收机的伪距。
确定N0方法的分类:
1.按解算所需时间的长短区别a。
经典静态相对定位法b.快速结算模糊度法:
滤波法,交换天线法,p码双频法,FARA模糊度函数法2.确定模糊度时接收机的运动状态:
静态:
整周未知数的平差待定参数法、三差法(多普勒法):
连续跟踪载波相位观测值(历元之间),由于其含有相同的整周未知数,求差后方程会不再含有整周未知参数,因此可直接解出坐标参数。
交换无线法、FARA法,动态(OTF):
最小二乘搜索法、模糊度函数法、综合法
FARA主要思想:
以数理统计理论假设检验为基础,利用初次平差提供的所有信息,包括解向量.相应的协因数阵和单位权


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- GPS 考试 重点
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 如何打造酒店企业文化2刘田江doc.docx
如何打造酒店企业文化2刘田江doc.docx
-
律师提供著作权法律服务业务操作指引.docx
-
18秋福建师范大学《经济法》在线作业一.docx
-
施工现场危险源.docx
-
山东省潍坊市昌乐县学年七年级地理下学期期中学业质量评估试题.docx
-
新视野大学英语视听说教程第二版第一册完整答案.docx
-
精校版重庆市 初中毕业水平暨高中招生考试中考英语试题AB卷Word版含答案解析.docx
-
新视野大学英语视听说教程第二版第一册完整答案.docx
-
江苏省刘国钧中学1112学年高二语文上学期期末考前辅导试题卷苏教版会员独享.docx
-
山东省潍坊市昌乐县学年七年级地理下学期期中学业质量评估试题.docx
-
西安交通大学18年课程考试《管理会计》作业考核试题.docx
-
施工安全保证体系.docx
-
南开17秋学期《科学启蒙尔雅》在线作业2.docx
-
秋福师《大学英语1》在线作业二.docx
-
231695 北交《运输物流管理》在线作业2 15秋答案.docx
-
梁原学区安全管理工作实施方案.docx
-
环保管理台帐明细.docx
-
我国三大翻译证书考试概览.docx
-
东大17秋学期《大学英语二》在线作业31.docx
-
静态分析指标.docx
-
山东金瀚控股金瀚置业绩效考核指标库.docx
-
B0301A国际贸易.docx
-
人教版八年级数学上册同步练习试题及答案第11章《三角形》 同步练习及答案111.docx
-
秋福师《概率论》在线作业二.docx
-
17秋福师《高级英语阅读二》在线作业一.docx
-
西南大学17秋0764《工程建设监理》在线作业参考资料.docx
-
生活宝典之社会大转盘一.docx
-
专卖店管理.docx
-
100个CFO的八年之资金管理篇.docx
-
东北师范古代汉语三16秋在线作业2.docx
-
专业技术人员公共危机管理考试.docx
-
东大17秋学期《大学英语二》在线作业31.docx
-
零点校园网分站创业企划书.docx
-
二级建造师《水利水电工程管理与实务》模拟考试I卷 附解析.docx
-
劳务派遣工作宗旨.docx
-
二年级上册数学教学工作总结5篇.docx
-
最新人教版小学语文一年级下册 识字1识字8 教学设计.docx
-
Get清风党规知识测试题及答案准确版.docx
-
射频电路实验指导书精.docx
-
《中医诊断学》考试题库及答案二.docx
-
前台接待员岗位职责.docx
-
九年级全Units 34 word版习题附答案.docx
-
张家港香山医院五年发展规划样本.docx
-
广东自考英语语言学真题.docx
-
采购与供应管理.docx
-
服务内容和要求.docx
-
万吨氧化铝项目可行性研究报告备案案例.docx
-
机械设计机械传动部分习题答案.docx
-
承诺如中标后可以向采购人提交履约保证金保函的承诺书精选word文档 11页.docx
-
高中数学 42结构图练习.docx
-
五星级酒店式物业服务标准.docx
