 控制系统综合训练两棵树任务书.docx
控制系统综合训练两棵树任务书.docx
- 文档编号:27633521
- 上传时间:2023-07-03
- 格式:DOCX
- 页数:32
- 大小:461.71KB
控制系统综合训练两棵树任务书.docx
《控制系统综合训练两棵树任务书.docx》由会员分享,可在线阅读,更多相关《控制系统综合训练两棵树任务书.docx(32页珍藏版)》请在冰豆网上搜索。
控制系统综合训练两棵树任务书
2.1系统的单位阶跃响应曲线
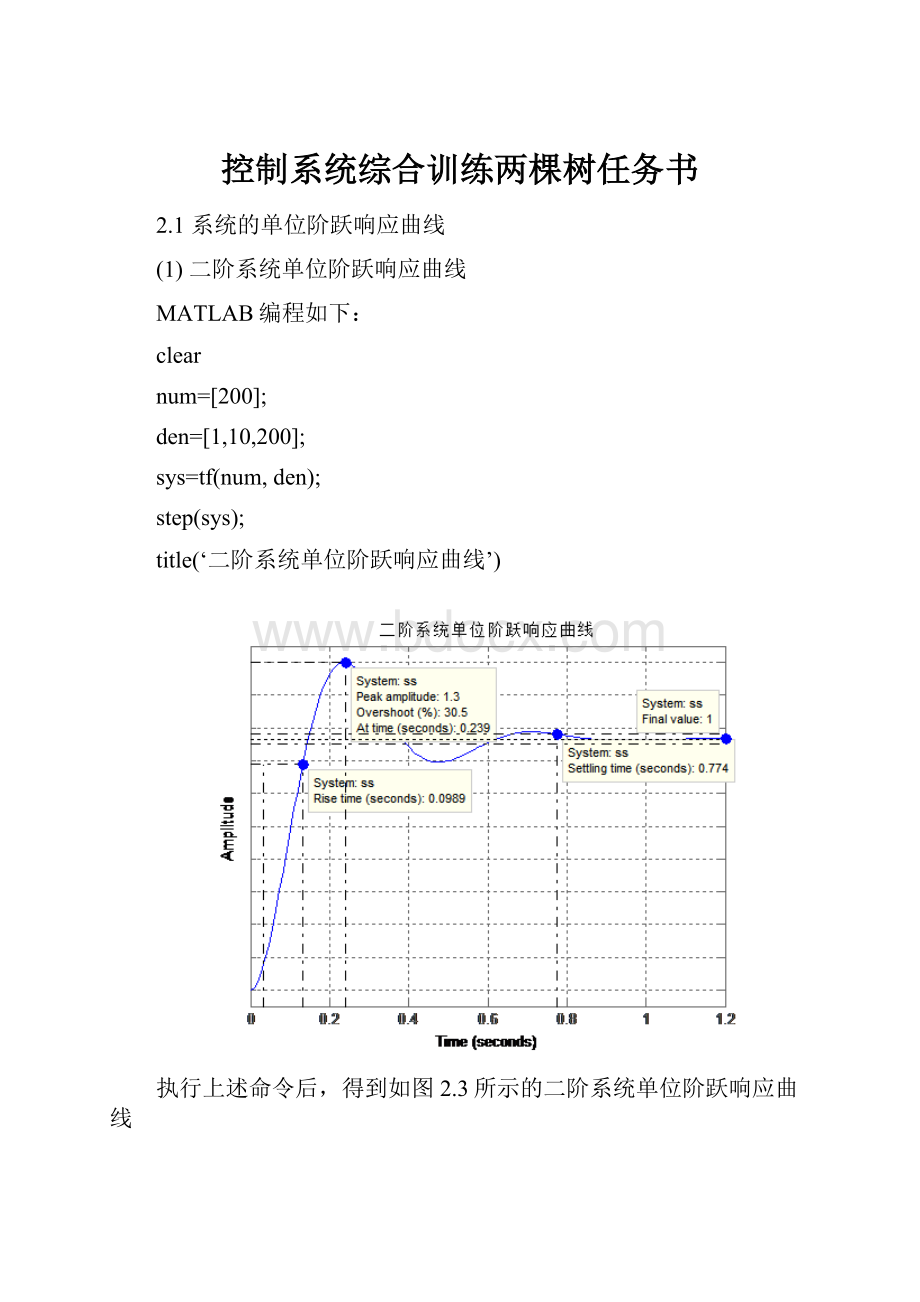
(1)二阶系统单位阶跃响应曲线
MATLAB编程如下:
clear
num=[200];
den=[1,10,200];
sys=tf(num,den);
step(sys);
title(‘二阶系统单位阶跃响应曲线’)
执行上述命令后,得到如图2.3所示的二阶系统单位阶跃响应曲线
图2.3二阶系统单位阶跃响应曲线
(2)三阶系统单位阶跃响应曲线
MATLAB编程如下:
clear
num=[100];
den=[1,12,20,100];
sys=tf(num,den);
step(sys);
title(‘三阶系统单位阶跃响应曲线’)
执行上述命令后,得到如图2.4所示的三阶系统单位阶跃响应曲线
图2.4三阶系统单位阶跃响应曲线
2.2系统的Bode图
(1)二阶系统bode图
MATLAB编程如下:
clear
bode;
num=[200];
den=[1,10,0];
sys=tf(num,den);
bode(sys);
title('二阶系统bode图')
执行上述命令后,得到如图2.5所示的二阶系统的bode图
图2.5二阶系统bode图
(2)二阶系统的相角裕度与幅值裕度
MATLAB编程如下:
clear
num=[200];
den=[1,10,0];
sys=tf(num,den);
margin(sys);
执行上述命令后,得到如图2.6所示二阶系统的相角裕度与幅值裕度
图2.6二阶系统的相角裕度与幅值裕度
(3)三阶系统bode图
MATLAB编程如下:
clear
bode;
num=[100];
den=[1,12,20,0];
sys=tf(num,den);
bode(sys);
title('三阶系统bode图')
执行上述命令后,得到如图2.7所示的三阶系统的bode图
图2.7三阶系统的bode图
(4)三阶系统的相角裕度与幅值裕度
MATLAB编程如下:
clear
num=[100];
den=[1,12,20,0];
sys=tf(num,den);
margin(sys);
执行上述命令后,得到如图2.8所示三阶系统的相角裕度与幅值裕度
图2.8三阶系统的相角裕度与幅值裕度
2.3系统的奈奎斯特图
(1)二阶系统奈奎斯特图
MATLAB编程如下:
clear
nyquist;
num=[200];
den=[1,10,0];
sys=tf(num,den);
nyquist(sys);
title('二阶系统奈奎斯特图')
执行上述命令后,得到如图2.9所示二阶系统奈奎斯特图
图2.9二阶系统奈奎斯特图
(2)三阶系统奈奎斯特图
MATLAB编程如下:
clear
nyquist;
num=[100];
den=[1,12,20,0];
sys=tf(num,den);
nyquist(sys);
title('三阶系统奈奎斯特图')
执行上述命令后,得到如图2.10所示三阶系统奈奎斯特图
图2.10三阶系统奈奎斯特图
2.4系统的根轨迹
(1)二阶系统根轨迹图
MATLAB编程如下:
clear
rlocus;
num=[200];
den=[1,10,0];
sys=tf(num,den);
rlocus(sys);
title('二阶系统根轨迹图')
执行上述命令后,得到如图2.11所示的二阶系统根轨迹图
图2.11二阶系统根轨迹图
(2)三阶系统根轨迹图
MATLAB编程如下:
clear
rlocus;
num=[100];
den=[1,12,20,0];
sys=tf(num,den);
rlocus(sys);
title('三阶系统根轨迹图')
执行上述命令后,得到如图2.12所示的三阶系统根轨迹图
图2.12三阶系统根轨迹图
2.5分析系统增加极点和增加零点后对系统性能的影响
(1)二阶系统增加极点和增加零点后对系统性能的影响
MATLAB编程如下:
num=[200];
den=[1,10,200];
subplot(2,2,1)
impulse(num,den);
xlabel('t');
ylabel('c(s)');
title('原系统');
numo=conv([200],[1,10]);
deno=[1,10,200];
subplot(2,2,2)
impulse(num0,den0);
xlabel('t');
ylabel('c(s)');
title('增加一个零点');
num2=[100];
den2=[1,10,200];
subplot(2,2,3)
impulse(num2,den2);
xlabel('t');
ylabel('c(s)');
title('原系统');
num3=[200];
den3=conv([1,10,200],[1,10]);
subplot(2,2,4)
impulse(num3,den3);
xlabel('t');
ylabel('c(s)');
title('增加一个极点');
执行上述命令后,得到如图2.13所示的二阶系统增加零极点后响应曲线图
图2.13二阶系统增加零极点后响应曲线图
(2)三阶系统增加极点和增加零点后对系统性能的影响
MATLAB编程如下:
num=[100];
den=[1,12,20,100];
subplot(2,2,1)
impulse(num,den);
xlabel('t');
ylabel('c(s)');
title('原系统');
num0=conv([100],[1,10]);
den0=[1,12,20,100];
subplot(2,2,2)
impulse(num0,den0);
xlabel('t');
ylabel('c(s)');
title('增加一个零点');
num2=[100];
den2=[1,12,20,100];
subplot(2,2,3)
impulse(num2,den2);
xlabel('t');
ylabel('c(s)');
title('原系统');
num3=[100];
den3=conv([1,12,20,100],[1,10]);
subplot(2,2,4)
impulse(num3,den3);
xlabel('t');
ylabel('c(s)');
title('增加一个极点');
执行上述命令后,得到如图2.14所示的三阶系统增加零极点后响应曲线图
图2.14三阶系统增加零极点后响应曲线图
3.1原系统的单位阶跃响应曲线
MATLAB编程如下:
clear
num=[10];
den=[0.05,0.6,1,10];
sys=tf(num,den);
t=(0:
0.1:
30);
step(sys,t);
title('原系统的单位阶跃响应曲线')
执行上述命令后,得到如图3.1所示的原系统单位阶跃响应曲线
图3.1原系统单位阶跃响应曲线
3.2原系统的Bode图、奈奎斯特图
(1)原系统的Bode图
MATLAB编程如下:
clear
bode;
num=[10];
den=[0.05,0.6,1,0];
sys=tf(num,den);
bode(sys);
title('原系统的bode图')
执行上述命令后,得到如图3.2所示的原系统的Bode图
图3.2原系统的Bode图
(2)原系统的幅值裕度与相角裕度
MATLAB编程如下:
clear
num=[10];
den=[0.05,0.6,1,0];
sys=tf(num,den);
margin(sys);
执行上述命令后,得到如图3.3所示的原系统的幅值裕度与相角裕度
图3.3原系统的幅值裕度与相角裕度
(3)原系统系统的奈奎斯特图
MATLAB编程如下:
clear
nyquist;
num=[10];
den=[0.05,0.6,1,0];
sys=tf(num,den);
nyquist(sys);
title('原系统的奈奎斯特图')
执行上述命令后,得到如图3.4所示的原系统的奈奎斯特图
图3.4原系统的奈奎斯特图
3.3原系统系统的根轨迹图
MATLAB编程如下:
clear
rlocus;
num=[10];
den=[0.05,0.6,1,0];
sys=tf(num,den);
rlocus(sys);
title('原系统的根轨迹图')
执行上述命令后,得到如图3.5所示的原系统的根轨迹图
图3.5原系统的根轨迹图
3.4校正装置参数的确定
MATLAB编程如下:
Pm=80*pi/180;
s=tf('s');
G0=10/(s*(0.1*s+1)*(0.5*s+1));
[mag,phase,w]=bode(G0);
alfa=(1-sin(Pm))/(1+sin(Pm));
adb=20*log10(mag);
am=10*log10(alfa);
wc=spline(adb,w,am);
T=1/(wc*sqrt(alfa));alfaT=alfa*T;
Gc=tf([T1],[alfa1])
校正装置的传递函数如下:
Gc=
0.9516s+1
--------------
0.007654s+1
3.5校正装置的Bode图
MATLAB编程如下:
clear
bode;
num=[0.9516,1];
den=[0.007654,1];
sys=tf(num,den);
bode(sys);
title('校正系统的bode图')
执行上述命令后,得到如图3.6所示的校正系统的bode图
图3.6校正系统的bode图
3.6校正后系统的单位阶跃响应曲线
MATLAB编程如下:
clear
num=[9.5165,10];
den=[0.0003827,0.0545924,0.607654,1,0];
sys=tf(num,den);
sys1=feedback(sys,1,-1)
step(sys1);
title('校正后系统单位阶跃响应曲线')
执行上述命令后,得到如图3.7所示的校正后系统单位阶跃响应曲线
图3.7校正后系统单位阶跃响应曲线
3.7校正后系统的Bode图、奈奎斯特图
(1)校正后系统系统的bode图
MATLAB编程如下:
clear
bode;
num=[9.5165,10];
den=[0.0003827,0.0545924,0.607654,1,0];
sys=tf(num,den);
bode(sys);
title('校正后系统的bode图')
执行上述命令后,得到如图3.8所示的校正后系统的bode图
图3.8校正后系统的bode图
(2)校正后系统的幅值裕度与相角裕度
MATLAB编程如下
clear
num=[9.5165,10];
den=[0.0003827,0.0545924,0.607654,1,0];
sys=tf(num,den);
margin(sys);
执行上述命令后,得到如图3.9所示的校正后系统的幅值裕度与相角裕度
图3.9校正后系统的幅值裕度与相角裕度
(3)校正后系统的奈奎斯特图
MATLAB编程如下
clear
nyquist;
num=[9.5165,10];
den=[0.0003827,0.0545924,0.607654,1,0];
sys=tf(num,den);
nyquist(sys);
title('校正后系统的奈奎斯特图')
执行上述命令后,得到如图3.10所示校正后系统的奈奎斯特图
图3.10校正后系统的奈奎斯特图
3.8校正后系统的根轨迹图
MATLAB编程如下
clear
rlocus;
num=[9.5165,10];
den=[0.0003827,0.0545924,0.607654,1,0];
sys=tf(num,den);
rlocus(sys);
title('校正后系统的根轨迹图')
执行上述命令后,得到如图3.11所示校正后系统的根轨迹图
图3.11校正后系统的根轨迹图
4.1原系统的单位阶跃响应曲线
MATLAB编程如下:
clear
num=[50];
den=[0.125,7,50];
sys=tf(num,den);
step(sys);
title(原系统的单位阶跃响应曲线')
执行上述命令后,得到如图4.1所示的原系统单位阶跃响应曲线
图4.1原系统单位阶跃响应曲线
4.2比例(P)、比例积分(PI)、比例积分微分控制(PID)控制器设计
(1)P、PI、PID控制单位阶跃响应曲线
MATLAB编程如下:
K=1;
T=0.01;
tao=0.18;
num=[50];
den=[0.125,7,0];
G=tf(num,den);
s=tf('s');
PKp=T/(K*tao);
Gk1=PKp*G;
sys1=feedback(Gk1,1,-1);
figure
(2)
step(sys1,'K:
')
gtext('p')
pause
holdon
PIKp=0.9*T/(K*tao);
PITi=3*tao;
Gc2=PIKp*(1+1/(PITi*s));
Gk2=Gc2*G;
sys2=feedback(Gk2,1,-1);
step(sys2,'b--')
axis([0,2,0,2])
gtext('PI')
pause
PIDKp=1.2*T/(K*tao);
PIDTi=2*tao;
PIDTd=0.5*tao;
Gc3=PIDKp*(1+1/(PIDTi*s)+PIDTd*s);
Gk3=Gc3*G;
sys3=feedback(Gk3,1,-1);
step(sys3,'r-')
title('P、PI、PID控制单位阶跃响应曲线')
grid
执行上述命令后,得到如图4.2所示的P、PI、PID控制单位阶跃响应曲线
图4.2P、PI、PID控制单位阶跃响应曲线
4.3实验仿真
1、比例控制仿真
(1)比例控制系统的Simulink图如下图4.3所示:
图4.3比例控制系统Simulink图
(2)比例控制系统的仿真图如下图4.4所示:
图4.4比例控制系统的仿真图
2、比例积分微分控制仿真
(1)比例积分控制系统的Simulink图如下图4.5所示:
图4.5比例积分控制系统系统的Simulink图
(2)比例积分控制系统的仿真图如下图4.6所示:
图4.6比例积分控制系统仿真图
3、比例积分微分控制系统仿真
(1)比例积分微分控制系统的Simulink图如下图4.7所示:
图4.7比例积分微分控制系统的Simulink图
(2)比例积分微分控制系统的仿真图如下图4.8所示:
图4.8比例积分微分控制系统的仿真图


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 控制系统 综合 训练 两棵树 任务书
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《贝的故事》教案4.docx
《贝的故事》教案4.docx
-
《对韵歌》优秀教案8.docx
-
《函数yAsinωx+φ+P图象》wwwnet.docx
-
《静夜思》教学设计.docx
-
《汽车底盘构造与维修》题库与考核标准.docx
-
《世说新语》复习资料.docx
-
《我的服装我做主》教案设计.docx
-
《在品味情感中成长》教学片断设计.docx
-
11造价员《建设工程造价管理基础知识》精讲教程文件.docx
-
《不会叫的狗》教案 人教部编版1.docx
-
《操作系统》二学期A卷及答案.docx
-
《傅雷家书》名著阅读笔记.docx
-
《反不正当竞争法》下互联网平台封禁行为考辨以消费者用户合法权益保护为中心.docx
-
《化工原理》第六章蒸发.docx
-
《蓝海战略》概要11页.docx
-
《人生》读书心得.docx
-
《荷叶圆圆》公开课教案优秀教学设计26.docx
-
《科技出行研究报告》智能网联与新能源将变革未来汽车出行.docx
-
《272 向量的应用举例》导学案1.docx
-
《秋天》评课稿.docx
-
《电算化》第二章会计电算化的工作环境章节练习.docx
-
《室外给排水管道》施组.docx
-
《广东省建筑与装饰工程综合定额》计算规则.docx
-
《我多想去看看》教学.docx
-
《直通车车手基础认证》 考试答案 70题之欧阳育创编.docx
-
7天销量翻10倍皇冠卖家教您玩转最精准流量.docx
-
9 阿长和山海经.docx
-
《比例尺》教案.docx
-
《菜根谭》注译四闲适篇.docx
-
《福尔摩斯探案集》读后感15篇.docx
-
《红对勾》古代诗歌选择题答案补充.docx
-
《课堂密码》读后感及心得精选多篇.docx
-
围护工程施工方案Word文档格式.docx
-
第二章《数据的离散程度》导学案Word下载.docx
-
学校运动会总结报告精选Word格式.docx
-
学年同步备课一体资料之化学鲁科必修2讲义第3章 重要的有机化合物 第3节 第1课时Word格式.docx
-
邮政宣传标语多篇Word文件下载.docx
-
贝的故事教学建议教学目标及反思二年级下册语文Word文档格式.docx
-
七年级上学期11生活中的立体图形同步习题有答案和解析Word文档格式.docx
-
新部编版四年级语文下册四单元质量分析卷及答案二篇Word格式文档下载.docx
-
城市道路绿化规划与设计规范同名7309Word格式.docx
-
四年级作文语言描写教案Word文件下载.docx
-
#3机A检计划Word下载.docx
-
XX销售管理制度Word格式文档下载.docx
-
六年级下册语文15单元知识点归纳Word格式.docx
-
幼儿园教师个人年终工作总结范文3篇Word文件下载.docx
-
学习杨善洲心得体会文档格式.docx
-
部编版八年级语文下册期末复习资料全套复习教案Word格式.docx
-
目标管理Word文档下载推荐.docx
-
电力安全常识考试题Word文档下载推荐.docx
-
第11章 神经系统常见疾病练习最新修正版Word格式文档下载.docx
