 啤酒灌装生产线卸垛机的设计.docx
啤酒灌装生产线卸垛机的设计.docx
- 文档编号:27527827
- 上传时间:2023-07-02
- 格式:DOCX
- 页数:16
- 大小:83.96KB
啤酒灌装生产线卸垛机的设计.docx
《啤酒灌装生产线卸垛机的设计.docx》由会员分享,可在线阅读,更多相关《啤酒灌装生产线卸垛机的设计.docx(16页珍藏版)》请在冰豆网上搜索。
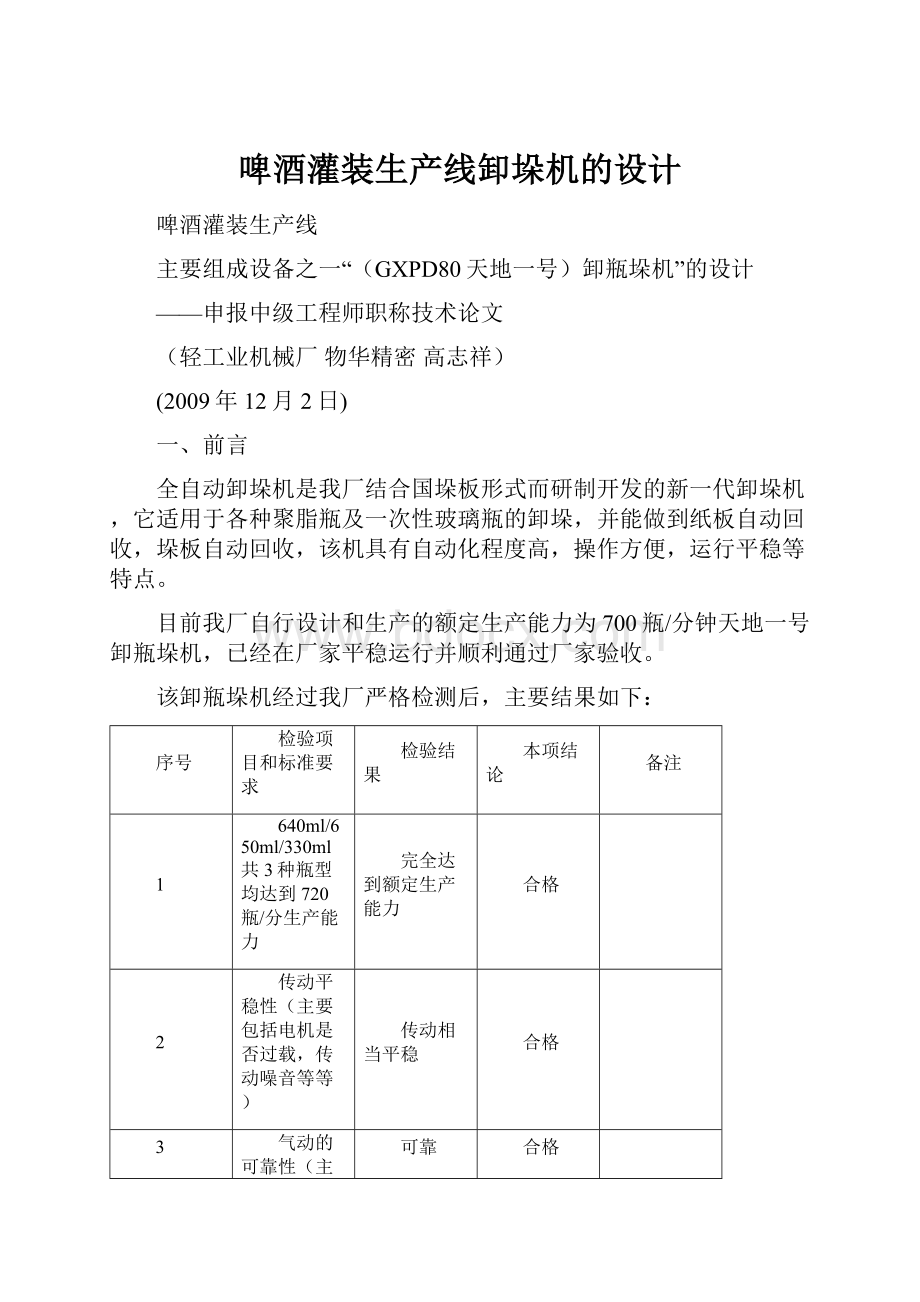
啤酒灌装生产线卸垛机的设计
啤酒灌装生产线
主要组成设备之一“(GXPD80天地一号)卸瓶垛机”的设计
——申报中级工程师职称技术论文
(轻工业机械厂物华精密高志祥)
(2009年12月2日)
一、前言
全自动卸垛机是我厂结合国垛板形式而研制开发的新一代卸垛机,它适用于各种聚脂瓶及一次性玻璃瓶的卸垛,并能做到纸板自动回收,垛板自动回收,该机具有自动化程度高,操作方便,运行平稳等特点。
目前我厂自行设计和生产的额定生产能力为700瓶/分钟天地一号卸瓶垛机,已经在厂家平稳运行并顺利通过厂家验收。
该卸瓶垛机经过我厂严格检测后,主要结果如下:
序号
检验项目和标准要求
检验结果
本项结论
备注
1
640ml/650ml/330ml共3种瓶型均达到720瓶/分生产能力
完全达到额定生产能力
合格
2
传动平稳性(主要包括电机是否过载,传动噪音等等)
传动相当平稳
合格
3
气动的可靠性(主要包括电磁阀,气路,气缸等等)
可靠
合格
4
设备完整性(零件,备件)
完整
合格
5
外观(喷涂质量等等)
合格
合格
本人参与该卸瓶垛机设计全程,并且主设计了其中的关键设备部分,下面该卸瓶垛机的原理、结构性能和主要设计计算过程作如下叙述。
二、产品介绍:
1、工作原理:
电气图
启动整机:
垛输送:
叉车上垛后GK01、GK02检测到垛,人工拆包,待人工控制的按钮盒被接通且GK03检测无垛,M1、M2电机启动垛向前运行,垛运行到GK03挡光时M1、M2停止等待,若GK05检测到无垛、JK01检测到主提升在下位时,M2、M3电机启动进垛,垛运行到GK04挡光时M2电机停止,M3电机减速到GK05挡光时停止。
主提升开始执行卸垛程序,当一垛卸完后主提升降至JK01位置时,M3、M4电机启动,到GK06挡光时M3电机停止((若此时前端在进垛则M3电机不停),若M5电动推杆处于下限位JK10触发,M6电机启动到GK07挡光时M4、M6电机停止,同时M5电动推杆启动抬起升降台,至JK9触发时M5电机反转降低升降台至JK10触发时停止,完成一次的垛输送。
当GK8检测到满垛时,警灯的黄灯亮起提示叉车取走垛板。
卸垛:
当垛运行至GK05挡光时,M7启动中速上升,至JK11时F1、F3工作Q1、Q2、Q3、Q4左右侧门伸出,至CK1、CK3、CK5、CK7触发F1、F3断电,垛上升至GK10触发时停止,F5工作驱动Q5吸盘驱动气缸伸出至CK9触发F5断电。
同时F7、F9工作真空发生器工作,吸取纸板,待真空度检测YK02、YK03触发,Q5吸盘驱动气缸缩回至CK10触发F6断电,F12工作打开后挡板至CK12触发时F12断电。
M8启动高速后退至JK6减速至JK5触发停止。
F7、F9断电,F8、F10工作丢掉纸板(高位)。
F11工作放下推杆至CK11、CK13触发时停止,M7启动慢速上升至至JK11停止,M8启动中速正传向前推瓶至JK7时,Q8、Q9伸出抬起推板,向前推瓶至JK8时M8停止,完成一层的卸垛。
重复动作至JK3触发,卸完最后一层后,M7启动反转高速下降至JK2时减速至JK1时停止,完成一垛的卸垛动作。
在这期间如GK12发出堵瓶信号,推瓶动作暂停,待GK12检测取消后自动推瓶,要有触摸屏有画面显示。
2、主要工艺流程:
进垛→输送→到位提升→首层吸纸板→夹瓶推瓶→储罐输送→主提升上升→循环运行
3、主要单元组成:
(1)输送台1;
(2)输送台2;
(3)输送台3;
(4)输送台4;
(5)输送台5;
(6)垛板收集;
(7)出瓶台;
(8)主提升;
(9)推瓶装置;
(10)层板吸取装置;
(11)操作平台;
(12)卸垛附件;
4、主要技术数据:
(1)额定生产能力:
700瓶/分
(2)瓶型:
650ml/640ml/325ml;
(3)垛板尺寸:
1000mmX1200mmX(140—150)mm;
(4)进垛高度:
550mm;
(5)出瓶高度:
3500mm;
(6)电源要求:
AC380V;3PH;50HZ;
(7)电机型号:
SEW电机;
(8)操作平台高度:
2700mm。
5、主要性能和特点:
(1)机器操作方便、安全及可靠,运行相当平稳。
(2)采用完全自动收集垛板,自动收集纸板。
(3)配有触摸屏控制系统,有手动、自动控制,产量显示,故障报警显示分页,各电机、气缸均可手动控制。
(4)全线采用立体平面式设计,运转可靠,占地面积小。
三、主要设计计算:
1、主要部件计算:
该机按700瓶/分的产量进行设计,所以该生产线对主提升的速度及设备可靠性要求相当高,因此对设备的设计和核算显得尤为重要,本文将具体介绍该部件的设计过程。
2、传动动力计算:
主提升传动示意图
序号
项目
公式
数值
单位
备注
一、设计参数
1
工件重量
G1
1000
kg
最重工件与最轻工件的平均重量
2
最重工件与最轻工件的重量差
G`=G1*10%
100
kg
按10%计算
3
工件重心到立柱中心
L1
780
mm
4
滑架重量
G2
316
kg
5
滑架重心到立柱中心
L2
500
mm
6
滑架滚轮间距
L3
600
mm
7
吊重间距
L4
151.78
mm
8
升降行程
S
2273
mm
9
链条重量
G4
5
kg/m
10
最大运行速度
Vmax
32
m/min
生产节拍要求
11
加减速时间
t
2
s
12
驱动轮半径
r
151.78
mm
13
回转摩擦增量
μ
0.01
14
传动总减速比
I
41.74
二、配重重量计算
1
理论配重重量
G3=S*G4+G2+G1/2
827.365
kg
2
设计配重重量
G3`=G3*95%
785.996
kg
重量计算误差取5%,配重偏小
3
实际配重重量
800
kg
考虑综合因素本次配重重量
三、以最高速匀速上升状态
对滑架侧进行受力分析有下列两等式成立
F=2N*ε+G1+G2
N*L3=G1*L1+G2*L2-F*L4
1
滑架与立柱正压力
N=(G1*L1+G2*L2-G1*L4-G2*L4)/(L3+2*ε*L4)
1212
kg
2
滑架与立柱运动摩擦系数
ε
0.03
3
滑架端链条、皮带拉力
F=2N*ε+G1+G2+G`
1489
kg
4
配重端链条、皮带拉力
F1=G3`
786
kg
5
驱动轴处拉力差
F2=F-F1
703
kg
6
驱动轴承座受力
F3=F+F2
2275
kg
7
驱动轴附加载荷
f=F3*μ
23
kg
8
链条、皮带重量
F4=S*G4
11
kg
9
功率计算拉力
F5=F4+F2+f
737
kg
10
初算电机功率
p=F*10*V/60/0.95/1000
3.88
kw
减速机传动效率0.95
11
驱动电机功率选择
P
5.5
kw
12
功率安全系数
S
1.4
13
驱动轴扭矩
Mn=F5*r/1000
111.84
kgm
14
电机减速机型号
R87DV132S4/BMG/2WE/M1/180/减速机,
15
电机减速机扭力矩
Ma
3470
Nm
16
电机减速机服务系数
SEW-fB
1.25
17
扭力矩安全系数
S扭力矩=Ma*SEW-fB/Mn1
4.0
18
运动部分质量
m=G1+G2+G3`+F4+30
2173.4
kg
顶部链条重量30kg
19
运动部分转动惯量
J1=mr2/i2
0.0287
kgm2
20
驱动轴及减速机转动惯量
J2
0.004
kgm2
估算
21
电动机转动惯量
J3
0.0448
kgm2
22
惯性加速度
(J1+J2)/J3
0.74
四、加速上升状态
1
加速度
a=Δv/t
0.25
m/s2
2
滑架端链条、皮带拉力
F6=(1+a/10)F
1526
kg
3
配重端链条、皮带拉力
F7=(1-a/10)G3`
766
kg
4
驱动轴处拉力差
F2=F-F1
760
kg
5
驱动轴承座受力
F3=F+F2
2292
kg
6
驱动轴附加载荷
f=F3*μ
23
kg
7
链条、皮带重量
F4=S*G4
11
kg
8
功率计算拉力
F5=F4+F2+f
794
kg
9
初算电机功率
p=F*10*V*0.8/60/0.95/1000
3.34
kw
减速机传动效率0.95、按最大速度80%计算
10
驱动电机功率选择
P
5.5
kw
11
功率安全系数
S
1.6
12
驱动轴扭矩
Mn=F5*r/1000
120.50
kgm
13
电机减速机型号
R87DV132S4/BMG/2WE/M1/180/减速机,
14
电机减速机扭力矩
Ma
3470
Nm
15
电机减速机服务系数
SEW-fB
1.25
16
扭力矩安全系数
S扭力矩=Ma*SEW-fB/Mn1
3.7
备注:
根据机械设计手册当两侧滑架为刚性联结时,取ε=0。
所以设计该设备减速机型号:
SEW:
R87DV132S4/BMG/2WE/M1/180
P=5.5kw,I=41.74
对主提升生产节拍要求速度计算:
按瓶型为650ml时,提升所需要的速度(七层瓶体):
主提升电机转速:
n主=34r/min
主提升链条线速度:
u线=Pi*D链轮直径*n主=3.14X0.303X34=32.3m/min
满足该卸瓶垛机对主提升设计时的单段速度要求。
四、电气控制要求:
电气运行参考本论文第二部分产品介绍其中的工作原理部分。
以下为电气控制要求
1、本机中有整机欠压保护YK01,保护时整机急停。
2、本机在输送台
(2)侧边要有防止未拆包的瓶垛进入主机的按钮盒并在触摸屏旁边设置拆包确认按钮(在触摸屏上做也可以)。
3、优化程序使运行机器运行平稳。
4、配有触摸屏控制系统,有手动、自动控制,产量显示,故障报警显示分页,各电机、气缸均可手动控制。
5、配置操作台安放在操纵平台上,力求操作简单。
6、操作台选用左右触摸屏,保证须同时动作的减速机能在同一分页上。
7、配备警示灯,防护网上设置复位按钮盒。
admini-说:
(2009-12-0712:
15:
41)
一、主要设计计算:
1、运行速度计算:
该机按36000瓶/小时的产量进行设计,箱子的长度为510mm,每箱装24瓶,所以设计的产量就应该保证每小时最少有效输送1500只,或者是每分钟25只(YPXI25型号的意义就在此),如果箱子是挨个连续输送的,输送链的速度就应该为每分钟25×0.51=12.75米,在实际的情况下箱子是隔开输送的,大概间隔一只箱子的距离,这样速度就应为12.75×2=25.5米/分,另外洗箱机的速度应比整线高出20%~50%左右的输送能力(经验数据),按1.5倍考虑,则最终的设计速度应为25.5×1.5=38.25米/分。
2、传动动力计算:
由上面知,箱输送链速度最高为V=38.25米/分,链轮的节圆直径为D=178.48mm,所以链轮的转速为:
n2=V/πD=38.25/(π×0.17848)
=68.66转/分
一般选用4级电机,则减速比i=1470/68.66=21.41,
传动电机功率的计算:
假定每只箱子重7.5公斤,两条链条重60公斤,每只箱子上承受7.5公斤的喷洗压力,房最多可排9只箱子,链条与导槽(材料为尼龙1010)的滑动摩擦系数按μ=0.34计算(查《机械设计手册》得),则摩擦力:
F1=μN1=0.34×((7.5+7.5)×9+60)×9.8=649.74牛,
传动功率:
P1=F1.V=649.74×38.25/60=414.21瓦,
在卡箱的情况下链条与箱子之间产生滑动摩擦F2所消耗的功率:
P2=F2.V
F2=μN2=0.34×(7.5+7.5)×9×9.8=449.82牛
P2=F2.V=449.82×38.25/60=286.76瓦
所以总功率:
P=P1+P2=414.21+286.76=700.97瓦
考虑5%其它传动摩擦损耗(如轴承转动,链条链轮传动等)
所以P=700.97×1.05=736.02千瓦,取0.75千瓦。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 啤酒 灌装 生产线 卸垛机 设计
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《C12343098汽轮机操作规程》要点.docx
《C12343098汽轮机操作规程》要点.docx
-
《钢丝绳芯输送带硫化接头标准》.docx
-
《建筑装饰CAD》课程标准.docx
-
《劳动合同书》范本下载.docx
-
《普通话实用训练教程》教案 1.docx
-
《上海星河湾土方道路景观铺装景观建筑景观小品绿化种植及配套水电安装工程施工组织设计》教学.docx
-
#2#014年护士执业资格考试考前押题卷实践能力.docx
-
《繁荣世界守护者》图文流程攻略.docx
-
《工业设计机械基础》复习题.docx
-
《机电一体化系统设计》思考题.docx
-
《Java项目实训》课程设计计算器要点.docx
-
《赤壁赋》必修一9.docx
-
《工商企业经营管理》重点复习题供参考.docx
-
《审计准则第1322号公允价值计量和披露的审计》指南全解.docx
-
《索溪峪的野》课堂教学实录文档资料.docx
-
《餐饮服务与管理》教学计划复习进程.docx
-
《花卉栽培》试题库完整.docx
-
《经络学B》答案.docx
-
《身边地化学物质》知识点汇总情况.docx
-
《5鲁滨逊漂流记》教学设计和教案附同步练习.docx
-
《送别组诗》教案.docx
-
《Visual Basic程序设计基础》课后习题参考答案.docx
-
《创新与企业家精神》.docx
-
《詹天佑》教学反思说课稿教学设计教材.docx
-
《风力发电机组设计方案与制造》课程设计方案任务书.docx
-
《最后的姿势》教学设计.docx
-
1楼无机保温砂浆外墙外保温涂料饰面1分解.docx
-
5篇学校工作开展情况述职报告.docx
-
6届高三上学期一轮纠错生物试题附答案.docx
-
《图书馆学概论》知识点.docx
-
《语言学导论》期末复习及练习.docx
-
02煤矿电能质量治理技术的研究与应用计划任务书.docx
-
一年级下册语文第一单元教案.docx
-
一医方.docx
-
医疗保险服务医师申请登记表.docx
-
医务人员年度工作总结模板五篇.docx
-
医院基建工作总结多篇范文.docx
-
医院药品管理系统数据库的设计说明.docx
-
以学会感恩为主题的演讲稿.docx
-
银行活动方案实施方案.docx
-
印章使用管理制度完整版教材.docx
-
应知应会培训材料.docx
-
西宁市房屋租赁合同范本标准版.docx
-
用友erpu8实验心得共15页.docx
-
系统设计实验报告.docx
-
显示资料.docx
-
现代企业经营管理整书复习资.docx
-
乡镇住建局十二五建设规划工作总结可编辑版.docx
-
项目策划书.docx
-
项目申报资金筹措方案.docx
-
消防检测应急预案3篇.docx
