 运动控制卡和PLC实现位置控制docx.docx
运动控制卡和PLC实现位置控制docx.docx
- 文档编号:27516479
- 上传时间:2023-07-02
- 格式:DOCX
- 页数:13
- 大小:282.10KB
运动控制卡和PLC实现位置控制docx.docx
《运动控制卡和PLC实现位置控制docx.docx》由会员分享,可在线阅读,更多相关《运动控制卡和PLC实现位置控制docx.docx(13页珍藏版)》请在冰豆网上搜索。
运动控制卡和PLC实现位置控制docx
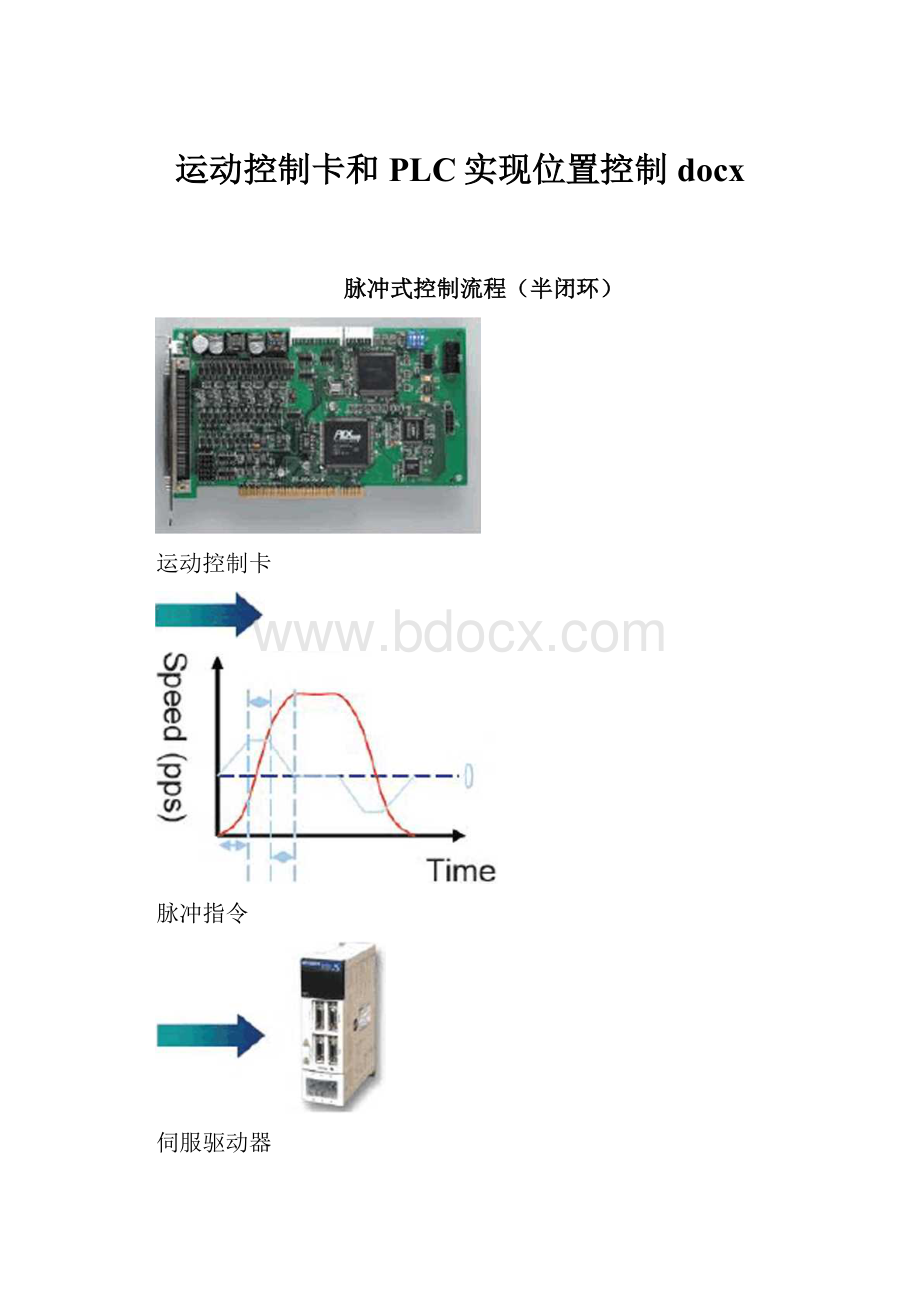
脉冲式控制流程(半闭环)
运动控制卡
脉冲指令
伺服驱动器
马达
实际应用(C)
连续插补
每个轴配置3个硬件寄存器用于命令的预装载
目标系统
Y
(1000,1000)(2100,1000)
才、厂、
Z(\(2500,600)
V»lc»caty二1000PP&
Q0)
(210071000)
(2500,-600)
1
预装载寄存器空中断
主程序
载入下一条运动指令
辰搀制
软件结构图
客户应用
编程环境
打孔机
搬运机
◊利用PLC模块实现位置控制的优点:
1>在实现位置控制的时候,可充分利用PLC系统的硬件和软件资源。
更便于在柔性制逍系统(FMS)、计算机集成制造系统(CIMS)或工厂自动化(FA)系铳中大畳应用位置控制。
2、用户可根据自身耍求灵活配Jt系藐,既降低成本,又能因地制宜。
3、可靠性髙,
俊辰控制
◊脉冲输出卑L元
1.点位控制的脉冲输出单元F2-30GM
2.脉冲输出棋块FX-1PG(FX2,FXqc用)
3.脉冲输出草元FX-1GM(FX?
、FX2(rffl)
4.2轴定位单元FX-20GM
1.点位控制的脉冲输出单元F2-30GM
脉冲输出单元F2-30GM与步进电机或伺服电机
驱动器相接,可驱动步逬电机或伺服电机实现位置控
制。
俊辰搀制
F2-30GM^Lffi系统方框
驱动器DRU
「订吊上尹工件,产1,
pg]电机厂(7〃〃"////////力\W////77771
M6
编码器
F2-30GM
数字开关
⑧⑨CD②[3③
丿
<
GP-20F-E
编程髀arrf
Fl-30TP-CAB
F2-30TP
CMT
GP-80CCB
CIO
F2-F1
可编程控制器
保矍投制
2.脉冲输出模块FX-IPG(FX2,FX2C^B)
FX-1PG脉冲输出模块是一种根据FROM/TO指令进行与FX“FXzc系列PLC数据交换的特殊功能模块。
用一台FX-1PG独立进行一轴定位控制,而一台PLC则最多可连8台FX4PG。
3.脉冲输出单元FX-1GM(FX2,FXqc用)
FX-]GMA_种采用定位专用语吉的简易高功能定ttMJto通用的具有7点输入.7点输出,还4T定位控制编租语吉。
FX-1GM脉冲输出单元聂髙输出频率为100K波待卒,
可讶到足够的控制精度。
4.2轴定位单元FX-20GM
FX-20GMA―能独立进行2柚定位控制的装JL。
它不仅备有定位控制语吉、编程控制语吉,还有可进行数据处理的功能指令,因此可独立进行更高级的定位控制。
定位控制:
FX-10GM
•输入输出规格
(F&用)、2轴:
FX-20GM(F&用)、E-20GM(单独运转专用)
•特点
FX •利用1台FX-10GM可以控制1轴,FX(E)-20GM可以控制独立2轴或者直线插补、圆孤插补的同时2轴° •可以作最大200KPPS的脉冲输出。 (以FX(E)・20GM控制插补时最大10OKPPS) •搭载定位专用语句(8d命令)和序列语句,F&系列程序装置同总线连接,原本也可以单独运转» •编写定位程序可用专用手提式(E-20TP)编写。 •在把FX-10GM、FX-20GM接在FX%上时,需要和FX冊CNV-IF一同使用。 项目 内容 FX-10GM FX-20GM.E-20GM 最大2轴•同R勺2辎(直统描补•圆51播补)或妙立2繪 输入出占有阳 每一台占有PLC的输入输出8点 酥冲检出影式 开式连接濟品体管蜿出DC5-24V 控制輸入 操作系况;MANU(手动)、FWD(手动正转)•RVS(手动逆转〉•2RN(机械原点返回)・ START(自动启动)“STOP(停止),手倾冲瀚(2KPPS)•步进运转输入(利用寥数设定)机械系焼: DOG(逬点信号)•LSF(正转限界)、LSR(逆转限界)、中断7点(FXJ0GM是4点)伺服系铳: SVRDY(伺决准备)・SVEND(伺眾未®0•PG0〈零点信号) 逼用: HAX3通用: 本体曲X7、利用『展橫块X4AX67(8进制番号)可輸入 控制输出 向服系疣: FP(正馥綠冲)>RP(蹙妹咏冲)、CLR備除俟養计數00 漏用: Y0-Y5逼用: 本体YOY7-利用萨展樓块丫1H7(B进制番号)可輸出 •系统构成 m控制 o运动控制棋块 1.片位控制开关F2-32-RM-SET 2.A系列的运动控制模块 (1)位Jt控制功能棋块AD71和AD72 (2)实现运动控制和顺控一体化的A73CPU 棋块 1.芹位控制开关F2-32-RM-SET F2・32RM・SET可编程轮开关集CPU、电源、输入、输出编程器于一体,可通过简单的键操作,替代32个凸轮开关,逬行32个输出动作f实现角位置控制。 m控制 2.A系列的运动控制模块 (1)位置控制功能棋块AD71和AD72 位JL控制功能棋块AD71和AD72是一种离精度定位會能化定位棋块。 AD71与AD72的主耍区别在于AD71没有偏差计数器与D/A变换这两个环节。 —<辰控制 2.A系列的运动控制模块 (2)实现运动控制和顺控一体化的A73CPU模块 A73CPUA系列PLC中一种专门用于远动控制的CPUo以A73CPU为核心的三菱多柚定位系貌,将伺服控制功能和顺控.逻辑控制等功能以JR性方式结合在一廻,以适应工厂自动化所必须满足的多品种.小批量生产的耍求,达到生严的髙度灵活性和可靠性的统_。 A73CPU位Jt控制系统原理 多轴定位控S'JCPL AD司服放大器MR—SB


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 运动 控制 PLC 实现 位置 docx
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《C12343098汽轮机操作规程》要点.docx
《C12343098汽轮机操作规程》要点.docx
-
《钢丝绳芯输送带硫化接头标准》.docx
-
《建筑装饰CAD》课程标准.docx
-
《劳动合同书》范本下载.docx
-
《普通话实用训练教程》教案 1.docx
-
《上海星河湾土方道路景观铺装景观建筑景观小品绿化种植及配套水电安装工程施工组织设计》教学.docx
-
#2#014年护士执业资格考试考前押题卷实践能力.docx
-
《繁荣世界守护者》图文流程攻略.docx
-
《工业设计机械基础》复习题.docx
-
《机电一体化系统设计》思考题.docx
-
《Java项目实训》课程设计计算器要点.docx
-
《赤壁赋》必修一9.docx
-
《工商企业经营管理》重点复习题供参考.docx
-
《审计准则第1322号公允价值计量和披露的审计》指南全解.docx
-
《索溪峪的野》课堂教学实录文档资料.docx
-
《餐饮服务与管理》教学计划复习进程.docx
-
《花卉栽培》试题库完整.docx
-
《经络学B》答案.docx
-
《身边地化学物质》知识点汇总情况.docx
-
《5鲁滨逊漂流记》教学设计和教案附同步练习.docx
-
《送别组诗》教案.docx
-
《Visual Basic程序设计基础》课后习题参考答案.docx
-
《创新与企业家精神》.docx
-
《詹天佑》教学反思说课稿教学设计教材.docx
-
《风力发电机组设计方案与制造》课程设计方案任务书.docx
-
《最后的姿势》教学设计.docx
-
1楼无机保温砂浆外墙外保温涂料饰面1分解.docx
-
5篇学校工作开展情况述职报告.docx
-
6届高三上学期一轮纠错生物试题附答案.docx
-
《图书馆学概论》知识点.docx
-
《语言学导论》期末复习及练习.docx
-
02煤矿电能质量治理技术的研究与应用计划任务书.docx
-
投资合同中外合资经营企业合同锅炉生产.docx
-
新年贺词祝福语.docx
-
项目级建筑安全培训课程讲解.docx
-
投标售后服务的承诺书.docx
-
新人教版语文七年级上册期末精品测试题及参考答案经典.docx
-
图书馆管理系统可行性研究报告.docx
-
新世纪大学英语综合教程4课后题翻译答案.docx
-
消防水池施工方案密闭空间.docx
-
新危化品名录解读剖析.docx
-
图形变变变教学评语共6篇.docx
-
销售年会主持稿.docx
-
新学期班主任工作计划精选.docx
-
小班晨间谈话内容进度表.docx
-
推荐AFU阿芙品牌精油产品线上线下市场营销策划方案书.docx
-
新浙教版七年级上册科学期末复习教案.docx
-
小区拦截营销17步.docx
-
推荐小学一年级下册数学奥数知识点讲解第10课《自然数串趣题》试题附答案.docx
-
信号与信息处理研究生.docx
-
团队领导力培训心得总结.docx
