 codesys所有函数的详细说明.docx
codesys所有函数的详细说明.docx
- 文档编号:27505375
- 上传时间:2023-07-02
- 格式:DOCX
- 页数:55
- 大小:340.85KB
codesys所有函数的详细说明.docx
《codesys所有函数的详细说明.docx》由会员分享,可在线阅读,更多相关《codesys所有函数的详细说明.docx(55页珍藏版)》请在冰豆网上搜索。
codesys所有函数的详细说明
二、模拟量标定库AnalogFilterLibrary
模拟量标定库就是指AnalogFilter.lib中的一些库函数。
2.1CUT功能块
功能描述:
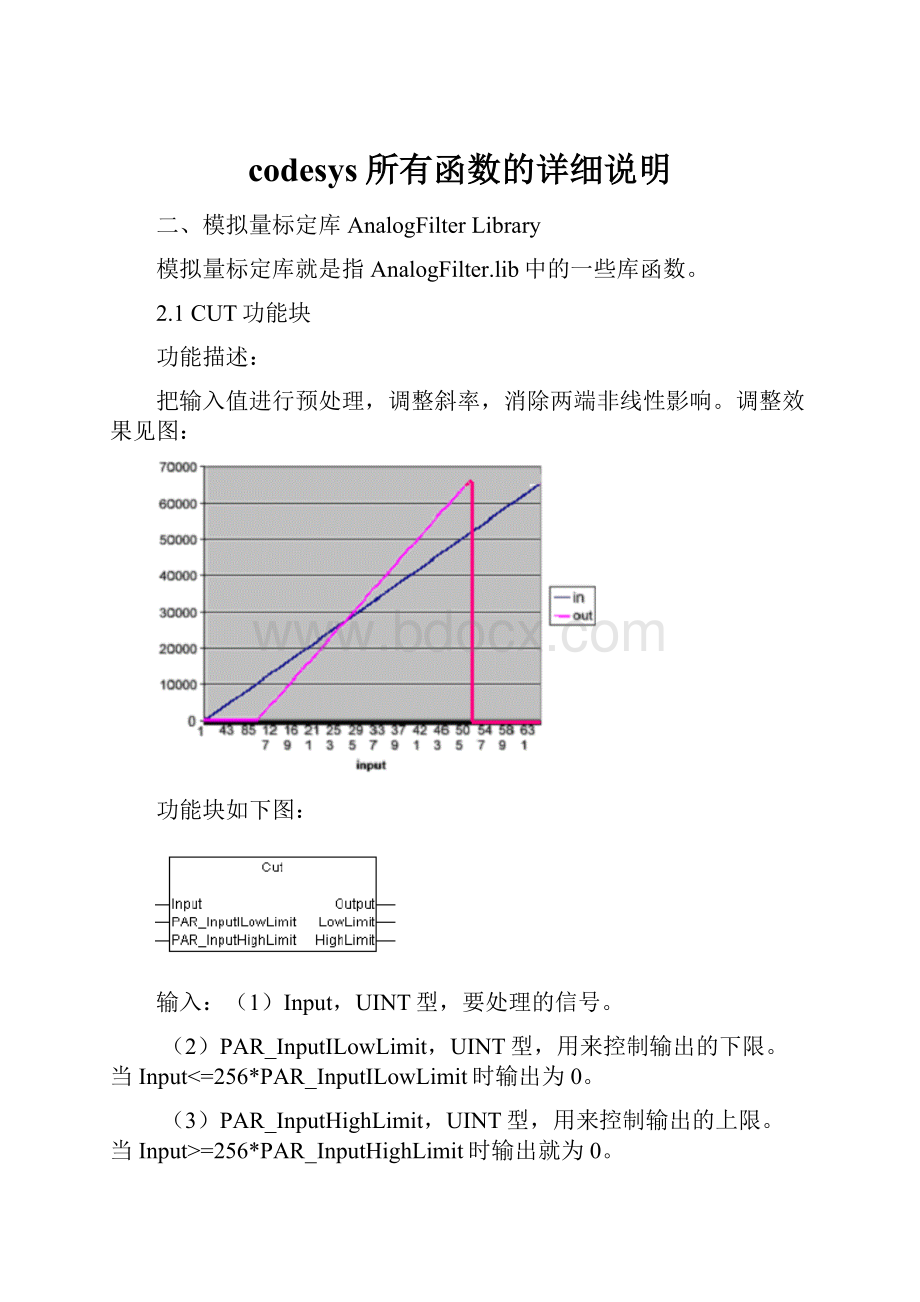
把输入值进行预处理,调整斜率,消除两端非线性影响。
调整效果见图:
功能块如下图:
输入:
(1)Input,UINT型,要处理的信号。
(2)PAR_InputILowLimit,UINT型,用来控制输出的下限。
当Input<=256*PAR_InputILowLimit时输出为0。
(3)PAR_InputHighLimit,UINT型,用来控制输出的上限。
当Input>=256*PAR_InputHighLimit时输出就为0。
输出:
(1)Output,UINT型,处理完的信号。
(2)LowLimit,BOOL型,Input<=256*PAR_InputILowLimit时LowLimit为TRUE。
(3)HighLimit,BOOL型,Input>=256*PAR_InputHighLimit时HighLimit为TRUE。
2.2HP功能块
功能描述:
设置一个死区,把死区以内的值都设为0。
功能如图:
功能块如下图:
输入:
(1)Input,UINT型,输入信号。
.
(2)PAR_CutLimit,UINT型,死区控制参数。
当Input<=65535*PAR_CutLimit%时输出为0。
输出:
(1)Output,UINT型,处理完的信号。
2.3JoyFilter功能块
功能描述:
JoyFilter块是一个双向的模拟量标定块,也就是说它对输入的模拟量进行预处理,把输出范围调整为-32767~32767。
功能块如下图:
输入:
(1)AnalogInput,UINT型,模拟量的输入信号。
(2)DI_JoystickDirSwitchPOS,BOOL型,正向微动开关。
当PAR_DirSwitchDiagnosticNotUse为FALSE时,此时又手柄向正向移动,那么只有正向微动开关TRUE,OUTPUT才会有输出。
(3)DI_JoystickDirSwitchNEG,BOOL型,负向微动开关。
当PAR_DirSwitchDiagnosticNotUse为FALSE时,此时又手柄向负向移动,那么只有负向微动开关TRUE,OUTPUT才会有输出。
(4)PAR_NegFull,UINT型,负向输入的调节参数。
取值范围:
0~255,主要用于当负向输入最大时,调节参数使得OUTPUT也为负向最大。
(5)PAR_POSFull,UINT型,正向输入的调节参数。
取值范围:
0~255,主要用于当正向输入最大时,调节参数使得OUTPUT也正负向最大。
(6)PAR_Zero,UINT型,零输入的调节参数。
取值范围:
0~255,主要用于当手柄在零位时,即零输入时,调节参数使得OUTPUT也为零。
(7)PAR_DeadBand,UINT型死区设置参数。
取值范围:
0~100。
当输入进入参数设置范围,输出为零
(8)PAR_NegProgression,SINT型。
取值范围:
-100~100,设置负向输出缓冲曲线度,手柄负向输出值相对于输入值的一个响应曲线,曲线如图:
(9)PAR_PosProgression,SINT型。
取值范围:
-100~100,设置正向输出缓冲曲线度
,手柄正向输出值相对于输入值的一个响应曲线。
(10)PAR_MinErrorDifference,UINT型,取值范围:
0~100,设置出错范围,当输入超出范围时,激活ErrorHigh或ErrorLow开关,并使输出为零。
(11)PAR_FaultOnDelay,UINT型,取值范围:
0~255,过载延时。
(12)PAR_DirSwitchDiagnosticNotUse,BOOL型,此参数为TRUE时,微动开关无效,为FALSE时,微动开关有效
输出:
(1)OutputEable,BOOL型,输出使能,为TRUE是块才会有输出。
(2)Output,INT型,调整后的信号量,输出数值范围-32767~32767
(3)ErrorHigh,BOOL型,当输入超出PAR_Full+5000范围时,ErrorHigh为TRUE,输出置零。
(4)ErrorLow,BOOL型,输入超出PAR_Zero–PAR_MinErrorDifference范围,ErrorHigh为TRUE,并把输出置零。
(5)JoystickDirSwitchPOSMissing,BOOL型,正向微动开关出错时,值为TRUE。
(6)JoystickDirSwitchNEGMissing,BOOL型负向微动开关出错时,值为TRUE。
(7)JoystickDirSwitchPOSAndNEGOn,BOOL型,正、负向微动开关同时为TRUE时,值为TRUE。
2.4JoystickAllnputOutOfRange功能块
功能描述:
本功能块是用来实现对一个模拟量输入的观察。
功能块如下图:
输入:
(1)Allnput,UINT型,需要观察的模拟量信号。
(2)PAR_PosFull,UINT型,正向最大调整参数。
(3)PAR_NegFull,UINT型,负向最大调整参数。
(4)PAR_MinErrorDifference,UINT型,设置出错范围,当输入超出范围时,激活ErrorInputTooHighOut或ErrorInputTooLowOut开关,并使输出为零。
输出:
(1)ErrorInputTooHighOut,BOOL型,AIInput>PAR_PosFull*256+PAR_MinErrorDifference,则输出为TRUE。
(2)ErrorInputTooLowOut,BOOL型,AIInput 2.5JoystikDirSwitchDiagnostic功能块 功能描述: 本功能块是用来观察手柄模拟量输入时微动开关的状态。 功能块如下图: 输入: (1)AnalogInput,UINT型,需要观察的模拟量信号。 (2)DI_JoystickDirSwitchPOS,BOOL型,正向微动开关。 当PAR_DirSwitchDiagnosticNotUse为FALSE时,此时又手柄向正向移动,那么只有正向微动开关TRUE,OUTPUT才会有输出。 (3)DI_JoystickDirSwitchNEG,BOOL型,负向微动开关。 当PAR_DirSwitchDiagnosticNotUse为FALSE时,此时又手柄向负向移动,那么只有负向微动开关TRUE,OUTPUT才会有输出。 (4)PAR_PosFull,UINT型,正向最大调整参数。 (5)PAR_NegFull,UINT型,负向最大调整参数。 (6)PAR_Zero,UINT型,零输入的调节参数。 主要用于当手柄在零位时,即零输入时,调节参数使得OUTPUT也为零。 (7)PAR_FaultOnDelay,UINT型,过载延时。 输出: (1)JoystickDirSwitchPOSMissing,BOOL型,正向微动开关出错时,值为TRUE。 (2)JoystickDirSwitchNEGMissing,BOOL型负向微动开关出错时,值为TRUE。 (3)JoystickDirSwitchPOSAndNEGOn,BOOL型,正、负向微动开关同时为TRUE时,值为TRUE。 2.6MeanValue功能块 功能描述: 对给的数组进行求平均数操作。 功能块如图: 输入: (1)Input,UINT型,数据输入。 (2)PAR_Length,UINT型,取数长度,如值为5,则每5个值求一次平均值,并输出到output。 (3)Reset,BOOL型,复位信号,值为TRUE时不进行平均值运算。 输出: (1)Output,UINT型 2.7PedalFilter功能块 功能描述: PedalFilter功能块是一个单向的标定模块,主要用于把输入模拟量进行预处理,把输出量范围调整到0~65535。 功能块如下图: 输入: (1)AbalogInput,UINT型,来自于传感器的输入量 OutPutEnable,BOOL型,使能开关。 参数值为TRUE时,模块按当前值输出;为FALSE时,保持上一次输出值。 (2)PAR_Full,UINT型,取值范围: 0~255,此参数用于调整最大输出值,当输入最大时,使输出接近65535,小于65535。 (3)PAR_Zero,INT型,取值范围: 0~255,此参数用于调整零位,使输出为零。 (4)PAR_DeadBand,UINT型,取值范围: 0~100,设置死区,当输入进入参数设置范围,输出为零。 (5)PAR_Progression,SINT型,取值范围: -100~100设置输出缓冲曲线度。 (6)PAR_MinErrorDifference,UINT型,取值范围: 0~100,设置出错范围,当输入超出范围时,激活ErrorHigh或ErrorLow开关,并使输出为零。 (7)OutputEnable,BOOL型,使能开关。 输出: (1)Output,UINT型,取值范围: 0~65535,输出信号。 (2)ErrorHigh,BOOL型,高位出错开关。 输入>PAR_Full+PAR_MinErrorDifference范围,ErrorHigh为TRUE,并把输出置零。 (3)ErrorLow,BOOL型,低位出错开关,输入 2.8RC功能模块 功能描述: RC功能块是滤波功能块,它是对传感器信号的输入信号进行滤波。 滤波公式为: 功能块如下图: 输入: (1)Input,UINT型,输入信号。 输出: (1)Output,UINT型,输出信号。 2.9Scale功能块 功能描述: Scale功能块的主要作用是把一个0~65535量变换成为两个0~65535的量,如下图: 功能块如下图: 输入: (1)Input,UINT型 (2)PAR_Zero,INT型,设置零位,当输入为PAR_Zero*256时,输出为0。 (3)PAR_PosFull,UINT型,当input值>=PAR_PosFull*256时,输出为65535,PosValue为TRUE。 (4)PAR_NegFull,UINT型,当input值<=PAR_NegFull*256,输出为-65535,PosValue为FALSE。 输出: (1)Output,UINT型 (2)PosValueBOOL型,PAR_Zero*256>Input值,值为TRUE;PAR_Zero*256 2.10Transfer功能块 功能描述: Transfer模块用于设置缓冲曲线度,当Zero为TRUE时,输出为零,当Full为TRUE,而Zero不为零时,输出为65535。 缓冲曲线度公式: Y2表正向,Y3表负向。 曲线如下图: 功能块如下图: 输入: (1)Input,UINT型 (2)Zero,BOOL型,当Zero为TRUE时,输出为零。 (3)Full: BOOL型,当Full为TRUE,而Zero不为零时,输出为65535。 (4)PAR_Progression,INT型,曲线度设置参数。 (5)OutputEnable,BOOL型,当此参数值为TRUE时,模块按预定算法执行;为FALSE时,保持上一次输出 输出: (1)Output,UINT型 三、CANIIIEC库 本库就是一些基于CAN2.0协议的一些功能块。 也就是Can2.lib中的一些函数与功能块。 3.1CAN_II_BUFF_INIT函数 功能描述: 本功能块的主要作用是用来初始化CAN接受信息对象的。 注意CAN_II_BUFF_INIT,必须用在CAN_II_INIT前面。 本函数是BOOL型的。 函数块如下图: 输入: (1)ENABLE,BOOL型。 函数的使能变量。 (2)OBJ,对象号,输入数值,1~14,0是用来传输的号。 (3)ID,信息ID,11或29位ID。 (4)EXTENDED,BOOL型,用来扩展ID为29位。 输出: (1)ERROR,BOOL型。 当OBJ超出范围时有输出。 3.2CAN_II_GET_MSG功能块 功能描述: 当CAN总线上有新的CAN信息是接受数据。 功能块如下图: 输入: (1)ESSAGE,用户想接受的信息。 输出: (1)EXTENDED,BOOL型,当信息ID为29位时为TRUE。 (2)ID,信息的ID。 (3)DLC,信息的长度。 (4)DATAn,信息的数据,其中n=DLC。 (5)CUSTOMER,没有定义。 (6)NEW_DATA,BOOL型,当缓存中有新的数据时为TRUE。 3.3CAN_II_INIT函数 功能描述: CAN_II设备的初始化函数。 功能块如下图: 输入: (1)ENABLE,BOOL型,使函数可以工作。 (2)SPEED,CAN设备的波特率。 (3)GBML(GloBalMaskLong)29bit全球码。 (4)GBMS(GloBalMaskShort)11bit全球码。 (5)TERM_RESCAN的接受终端On/Off. 3.4CAN_II_RTR函数 功能描述: 发送远距离传送请求。 本函数是BOOL型的。 函数块如下图: 输入: (1)ENABLE,BOOL型,使能。 (2)OBJ选择对象号,1~13。 输出: (1)ERROR,当输出为TRUE时,就是选择的对象好有问题。 3.5CAN_II_STATUS功能块 功能描述: 本功能快就是用来返回CAN设备的状态。 功能块如下图: 输入: 无 输出: (1)LEC,就是返回最近的一个出错的代码。 (2)TXOK为TRUE时就表示传输成功。 (3)RXOK为TRUE时就表示接受成功。 (4)EWARN_COUNT出错记数器。 (5)BUSOFF_COUNT,总线关闭记数器。 3.6CAN_IIRX功能块 功能描述: 从更高的message对象来接受新的CAN信息。 功能块如下图: 输出: (1)EXTENDED,BOOL型,扩展信息的ID位为29位。 (2)ID,信息ID。 (3)DLC,数据长度1..8。 (4)DATAn,信息数据,其中n=DLC (5)CUSTOMER,没有定义。 (6)NEW_DATA,当有新的数据到了缓存中时为TRUE。 3.7CAN_IITX功能块 功能描述: 向更高的message对象来发新的CAN信息。 功能块如下图: 输入: (1)ENABLE,BOOL型,使能。 (2)XTENDED,BOOL型,扩展信息的ID位为29位。 (3)ID,信息ID。 (4)DLC,数据长度1..8。 (5)DATAn,信息数据,其中n=DLC。 CAN2使用说明: 接收数据: 1.可以采用CAN_II_BUFF_INIT和CAN_II_GET_MSG配合使用,自动将CAN总线上ID和CAN_II_BUFF_INIT相同ID的数据自动放到相应的缓存里面,建议如果接收的数据有限的话使用CAN_II_BUFF_INIT和CAN_II_GET_MSG函数接收数据,CAN_II_BUFF_INIT应在CAN_II_INIT之前。 2.也可以只使用CAN_IIRX,但是如果使用CAN_IIRX函数必须判断接收回来的ID和我需要的ID是否相等,因为CAN_IIRX将总线上所有的数据都接收回来。 发送数据: 使用CAN_IITX发送CAN数据由于发送缓存的限制,每一次最多可以发送8个不同CANID的数据,考虑到每次发送的可靠建议每次程序循环一次发送5个不同CANID的数据。 四、CANOPENIEC库 下面主要介绍的是一些基于CANOPEN协议的库函数。 也就是在canopen.lib中的一些函数与功能块。 4.1INITFUNCTION 4.1.1CANOPEN_END_INIT函数 功能描述: 本函数的主要作用是用来结束CANOPEN的初始化。 本函数是BOOL型的。 函数块如下图: 输入: (1)ENABLE: BOOL型,使能。 4.1.2CANOPEN_INIT_SDO函数 功能描述: 对SDO对象开始初始化。 函数图如下: 输入: (1)ENABLE,BOOL型,使能。 (2)ID,BYTE型。 (3)SDO_TYPE,BOOL型,FALSE时为TX型,TRUE时为RX型。 (4)SDO,BYTE型,SDO的编号。 4.1.3CANOPEN_START_INIT函数 功能描述: 本函数就是CANOPEN的开始初始化。 本函数是BOOL型的。 函数块如下图: 输入: (1)ENABLE,BOOL型,使能。 4.2PDOHANDLINGFUNCTIONS 4.2.1CANOPEN_ADD_NODE_RECEIVE_FROM函数 功能描述: 增加CANOPEN接收的一个节点号(4路PDO)。 本函数是BOOL型的。 函数图如下: 输入: (1)ENABLE,BOOL型。 使能。 (2)PDO_TYPE_SELECT,BOOL型,PDO的类型选择,FALSE为TPDOS型,TRUE为RPDOS型。 (3)ID,本PDO是节点ID的。 输出: (1)ERROR,当ID超出范围时ERROR有输出。 4.2.2CANOPEN_ADD_RECEIVE_PDO函数 功能描述: 增加接收一路PDO。 本函数是BOOL型的。 函数块如下图: 输入: (1)ENABLE,BOOL型。 使能。 (2)PDO_TYPE_SELECT,BOOL型,PDO的类型选择,FALSE为TPDOS型,TRUE为RPDOS型。 (3)ID,本PDO是节点ID的。 (4)PDO,BYTE型。 PDO号,1~4。 输出: (1)RROR,当ID或PDO超出范围时ERROR有输出。 4.2.3CANOPEN_ADD_TRANSMIT_NODE_ID函数 功能描述: 虚拟CANOPEN发送的一个节点号(4路PDO)。 本函数是BOOL型的。 函数图如下: 输入: (1)ENABLE,BOOL型。 使能。 (2)PDO_TYPE_SELECT,BOOL型,PDO的类型选择,FALSE为TPDOS型,TRUE为RPDOS型。 (3)ID,本PDO是节点ID的。 输出: (1)ERROR,当ID超出范围时ERROR有输出。 4.2.4CANOPEN_ADD_TRANSMIT_PDO函数 功能描述: 虚拟CANOPEN发送的一路PDO。 本函数是BOOL型的。 函数图如下: 输入: (1)EABLE,BOOL型。 使能。 (2)PDO_TYPE_SELECT,BOOL型,PDO的类型选择,FALSE为TPDOS型,TRUE为RPDOS型。 (2)ID,本PDO是节点ID的。 (3)PDO,BYTE型。 PDO号,1~4。 输出: (1)ERROR,当ID或PDO超出范围时ERROR有输出。 4.3SDOHANDLINGFUNCTIONS 4.3.1ADD_VERSION函数 功能描述: 把用户的串放入CANOPEN的版本对象中去(16#100A)。 本函数是BOOL型的。 函数图如下: 输入: (1)ENABLE,BOOL型,使能。 (2)VER,STRING型,用户定义的串。 4.3.2CANOPEN_GET_SDO函数 功能描述: CANOPEN接收一个SDO。 本函数是BOOL型的。 函数图如下: 输入: (1)ENABLE,BOOL型,使能。 (2)SDO,BYTE型,SDO号。 (3)INDEX,WORD型,对象的索引号。 (4)SUBINDEX,WORD型,对象的子索引号。 (5)OFFSET,BYTE型,数据在接受时的偏移量。 4.3.3CANOPEN_POINTER_SHARE函数 功能描述: 把用户定义的变量通过CANOPEN总线,用SDO对象发在总线上。 本函数是BOOL型的。 函数如下图: 输入: (1)ENABLE,BOOL型,使能。 (2)OUT,DWORD型,用户要放的变量。 它是一个指针操作。 (3)Length,BYTE型,所用的对象的长度。 (4)Size,BYTE型,所用的对象的长度。 4.3.4CANOPEN_PUT_SDO函数 功能描述: 向网络上的一个节点发送一个SDO。 本函数是BOOL型的 函数块如下图: 输入: (1)ENABLE,BOOL型,使能。 (2)SDO,BYTE型,SDO号。 (3)INDEX,WORD型,对象的索引号。 (4)SUBINDEX,WORD型,对象的子索引号。 (5)OFFSET,BYTE型,数据在接受时的偏移量。 (6)LENGTH,BYTE型,SDO对象的长度。 4.3.5CANOPEN_SHARE函数 功能描述: 把用户定义的串通过CANOPEN总线,用SDO对象发在总线上。 本函数是BOOL型的。 函数块如下图: 输入: (1)ENABLE,BOOL型,使能。 (2)OUT,STRING型,用户定义的串。 (3)Length,BYTE型,所用的对象的长度。 (4)Size,BYTE型,所用的对象的长度。 4.3.6CANOPEN_UPDATA_SHARE函数 功能描述: 把用户定义的串通过CANOPEN总线,用SDO对象发在总线上。 本函数是BOOL型的。 函数图如下: 输入: (1)ENABLE,BOOL型,使能。 (2)OUT,STRING型,用户定义的串。 (3)share_no,BYTE型,哪一个要更新。 (4)subindex,BYTE型,哪一个地方要更新。 4.4state中的函数与功能块 4.4.1CANOPEN_DIAGNOSE功能块 功能描述: 给出CAN以及程序循环的有关信息。 功能块如下图: 输出: (1)BUS_OFF_COUNT,BYTE型,总线关闭记数。 (2)EWARN_COUNT,BYTE型,错误与警告的数量。 (3)TXBUFF_FULL_COUNT,BYTE型,记CAN设备传输缓冲区满的次数。 (4)CYCLE_TIME,BYTE型,程序最后一个循环所用的时间,单位是毫秒。 (5)H


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- codesys 所有 函数 详细 说明
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《C12343098汽轮机操作规程》要点.docx
《C12343098汽轮机操作规程》要点.docx
-
《钢丝绳芯输送带硫化接头标准》.docx
-
《建筑装饰CAD》课程标准.docx
-
《劳动合同书》范本下载.docx
-
《普通话实用训练教程》教案 1.docx
-
《上海星河湾土方道路景观铺装景观建筑景观小品绿化种植及配套水电安装工程施工组织设计》教学.docx
-
#2#014年护士执业资格考试考前押题卷实践能力.docx
-
《繁荣世界守护者》图文流程攻略.docx
-
《工业设计机械基础》复习题.docx
-
《机电一体化系统设计》思考题.docx
-
《Java项目实训》课程设计计算器要点.docx
-
《赤壁赋》必修一9.docx
-
《工商企业经营管理》重点复习题供参考.docx
-
《审计准则第1322号公允价值计量和披露的审计》指南全解.docx
-
《索溪峪的野》课堂教学实录文档资料.docx
-
《餐饮服务与管理》教学计划复习进程.docx
-
《花卉栽培》试题库完整.docx
-
《经络学B》答案.docx
-
《身边地化学物质》知识点汇总情况.docx
-
《5鲁滨逊漂流记》教学设计和教案附同步练习.docx
-
《送别组诗》教案.docx
-
《Visual Basic程序设计基础》课后习题参考答案.docx
-
《创新与企业家精神》.docx
-
《詹天佑》教学反思说课稿教学设计教材.docx
-
《风力发电机组设计方案与制造》课程设计方案任务书.docx
-
《最后的姿势》教学设计.docx
-
1楼无机保温砂浆外墙外保温涂料饰面1分解.docx
-
5篇学校工作开展情况述职报告.docx
-
6届高三上学期一轮纠错生物试题附答案.docx
-
《图书馆学概论》知识点.docx
-
《语言学导论》期末复习及练习.docx
-
02煤矿电能质量治理技术的研究与应用计划任务书.docx
-
无缝线路铺设与养护维修毕业论文.docx
-
山科版小学英语四下U5教案.docx
-
武汉农村商业银行汉银财富恒盈系列第92期人民币理财产品讲课教案.docx
-
人教版政治必修一三四单元知识点总结.docx
-
天旗人力资源管理 建立基于胜任力的人力资源管理体系doc.docx
-
手机与能源消耗的数学研究.docx
-
入党志愿书填错的后果.docx
-
设备维护保养制度精选多篇.docx
-
巡查车改造技术设计全顺车型.docx
-
写字楼消防安装工程施工组织设计方案.docx
-
实验十监督分类图像数字处理.docx
-
球放在两根木棍的中间.docx
-
目视管理知识要点.docx
-
水厂技术交底土方钢筋砼结构8.docx
-
老师写给学生的留言.docx
-
新人教版五年级数学下册课课练.docx
-
模具寿命的概念.docx
-
事理性说明文范文.docx
-
统编版五年级语文下册我爱你汉字.docx
