 DLRB2600机器人打磨抛光实训系统.docx
DLRB2600机器人打磨抛光实训系统.docx
- 文档编号:274901
- 上传时间:2022-10-08
- 格式:DOCX
- 页数:9
- 大小:435.15KB
DLRB2600机器人打磨抛光实训系统.docx
《DLRB2600机器人打磨抛光实训系统.docx》由会员分享,可在线阅读,更多相关《DLRB2600机器人打磨抛光实训系统.docx(9页珍藏版)》请在冰豆网上搜索。
DLRB2600机器人打磨抛光实训系统
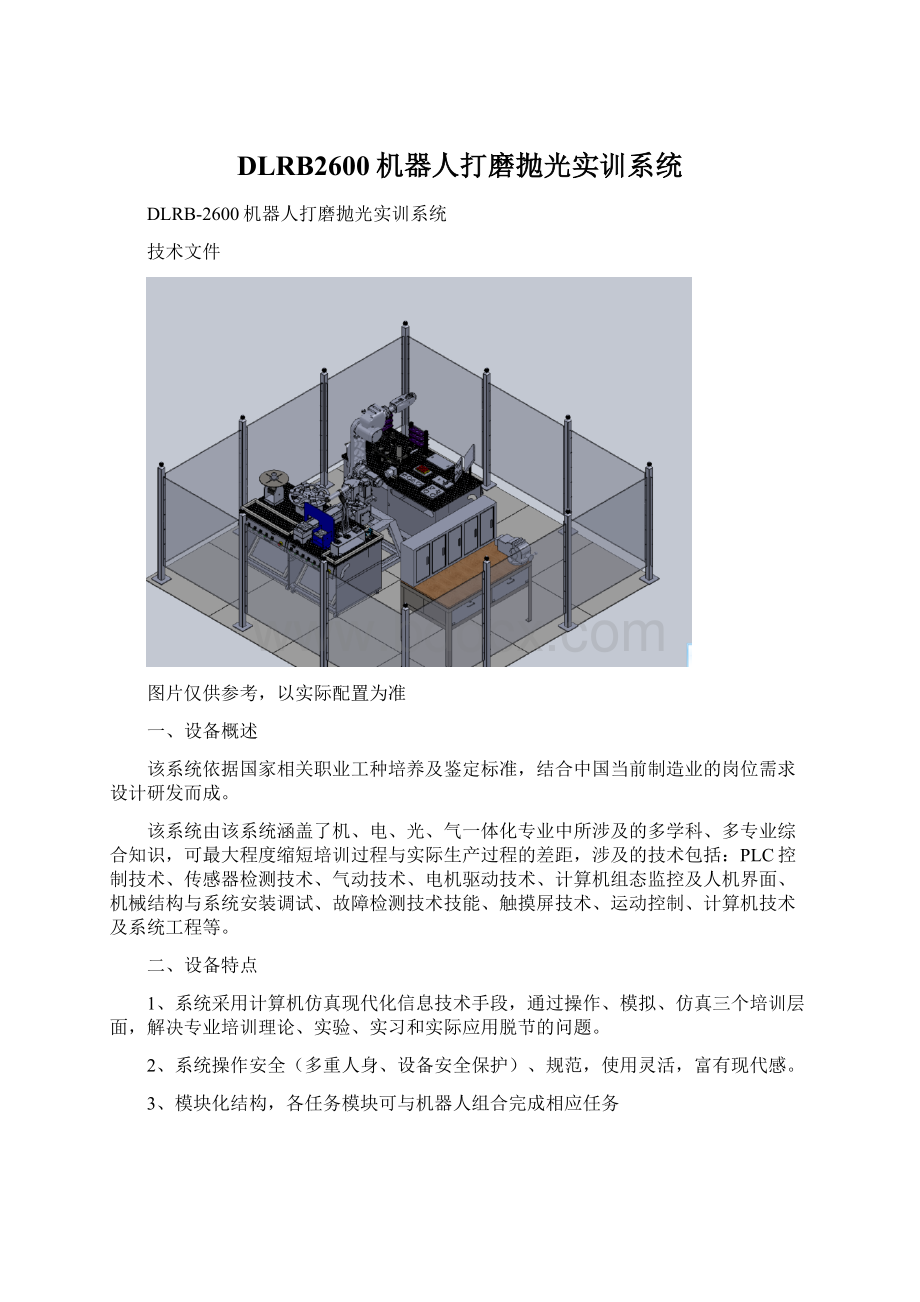
DLRB-2600机器人打磨抛光实训系统
技术文件
图片仅供参考,以实际配置为准
一、设备概述
该系统依据国家相关职业工种培养及鉴定标准,结合中国当前制造业的岗位需求设计研发而成。
该系统由该系统涵盖了机、电、光、气一体化专业中所涉及的多学科、多专业综合知识,可最大程度缩短培训过程与实际生产过程的差距,涉及的技术包括:
PLC控制技术、传感器检测技术、气动技术、电机驱动技术、计算机组态监控及人机界面、机械结构与系统安装调试、故障检测技术技能、触摸屏技术、运动控制、计算机技术及系统工程等。
二、设备特点
1、系统采用计算机仿真现代化信息技术手段,通过操作、模拟、仿真三个培训层面,解决专业培训理论、实验、实习和实际应用脱节的问题。
2、系统操作安全(多重人身、设备安全保护)、规范,使用灵活,富有现代感。
3、模块化结构,各任务模块可与机器人组合完成相应任务
4、开放式设计:
可根据实训内容选择机器人夹具及载体模型;并根据学员意愿选择在实训平台的安装位置及方向;且具有很好的延伸型,客户可根据自己的需求开发新模型及夹具。
三、技术参数
1、三相四线380V±10%50HZ
2、工作环境:
温度-10℃-+40℃,相对湿度<85%(25℃),无水珠凝结海拔<4000m
3、电源控制:
自动空气开关通断电源,有过压保护、欠压保护、过流保护、漏电保护系统。
4、输出电源:
(1)三相四线380V±10%50HZ
(2)直流稳压电源:
24V/5A,
7、机器人:
ABBIRB2600
四、各模块简介
1、实训台
实训台体采用优质钢板(板厚1.2mm)制作,表面喷涂处理;实训台面采用型材结构搭建,可任意安装机器人或其它执行机构;并有不锈钢网孔电气安装板(板厚1.5mm),用于安装控制器件与电源电路;实训台上配有相应的操作面板,采用内嵌按钮和指示灯,分别为“启动”、“停止”、“复位”,并且具备急停功能;可编程逻辑控制器安装于电气网孔板上,实现机器人与各任务模块的组合;实训台底脚上安装有脚轮,能够方便移动与定位。
2、机器人
1)机器人本体
采用ABBIRB2600型工业机器人
2)机器人本体
手腕持重:
12kg
最大臂展半径:
1.85m
轴数:
6轴
重复定位精度:
±0.07mm
防护等级:
IP67
轴运动:
轴动作范围最大速度
1 回转+180至-180175/s
2 立臂+155至-95175/s
3 横臂+75至-180175/s
4 腕 +400至-400360/s
5 腕摆+120至-120360/s
腕传+400至-400500/s
电源:
200-600V,50/60Hz
耗电量:
4KVA/7.8KVA(带外轴)
机器人尺寸:
底座:
676X511mm
机器人重量:
284kg
环境温度:
5C-45C
最大湿度:
95%
最大噪音:
70dB(A)
2)机器人控制器
IRC5控制柜
控制硬件:
多处理器系统
PCI总线
Pentium®CPU
大容量存储用闪存或硬盘
备用电源,以防电源故障
USB存储接口
控制软件:
对象主导型设计
高级RAPID机器人编程语言
可移植,开放式,可扩展
PC-DOS文件格式
RobotWare软件产品
内置16路输入/16路输出的数字量I/O模块
可扩展电子限位开关、5路安全输出(1-7轴监测)等安全选项
提供SafeMove功能,可实现静态、速度、位置、方向监测(机器人及附加轴)和8路功能启动安全输入和8路监测输出
电源电压三相200V-600V,频率50Hz-60Hz
预装软件,另提供光盘
用户接口:
控制面板机柜上
FlexPendant(示教器)重1kg
彩色图形界面触摸屏
操纵杆
紧急停机
热插拔
左右手操作支持
USB存储器支持
维护:
状态LED指示灯
诊断软件
恢复程序
登录时间标记功能
预留远程服务功能
安全性:
安全紧急停机
带监测功能的双通道安全回路
3位启动装置
电子限位开关:
5路安全输出(监测第1-7轴)
SafeMove:
静止、速度、位置与方向监测(机器人及附加轴)
8路安全输入(功能启用)
8路监测输出
物理特性:
尺寸(mm)970x725x710
重量:
150kg
机械接口:
输入/输出最多8,192个信号
数字24VDC或继电器信号
模拟2x0-10V
串行通道1xRS232/RS422
网络服务和LAN
双通道
可选现场总线(主)
DeviceNet
PROFIBUSDP
PROFINET
EtherNet/IP
Allen-Bradley远程I/O
InterBus
可选现场总线(从)
PROFIBUSDP
PROFINET
EtherNet/IP
CC-link
可选传感器接口
最多6通道
机器人上臂信号连接
控制器中用于附加设备Fieldbus扫描器的空间
探寻停止(带自动程序切换)
焊缝跟踪
轮廓跟踪
输送链跟踪
机器视觉系统
力控制
底座:
材料碳钢
表面喷漆防锈处理
尺寸600mm×730mm×20mm
3.打磨组件
1)额定功率340W
2)额定转速40000rpm
3)最大径向浮动距离±8mm
4)径向浮动力12.7N~42.3N
5)额定供气流量2.8L/s
6)重量1.2kg
供气系统:
1)额定功率780W
2)排气压力0.7MPa
工作台及工装夹具:
1)支撑底座材料碳钢,滚弯后焊接
2)支撑底座表面喷漆防锈处理
3)支撑底座尺寸600mm×300mm×660mm
4)工作台面材料碳钢,包含通用T型槽
5)工作台面尺寸700mm×500mm,厚度40mm
6)配有工装夹具
4、安全防护房
图片仅供参考
安全防护系统主要铝合金与钢化玻璃结构,尺寸:
3500mm×3500mm×1900mm,包含:
三色灯,按钮盒,光电开关,蜂鸣器及系统连线总成等组成。
设备周边安装围栏,上料工位开有人员进出门,门两侧安装有光电开关,在机器人工作运行期间,人员进入工作区域触发光电安全开关,机器人会自动停止运行,以保证人员安全。
围栏采用模块化设计,方案安装维护,模块与模块之间通过立柱和连接块连接,刚性好,牢固。
安全防护围栏的主要特点如下:
a)安全围栏布局紧凑,采用全封闭式防护,以防止有人进入危险区域造成意外伤害以及焊接弧光对车间其他工位的影响。
b)安全栏上设置安全门,安全门入口设置安全开关,与PLC连锁。
人员进入工作站内部之间,必须先打开安全开关,防止其他人关门上锁启动系统。
c)在工作站周边及内部安装多个紧急停止开关。
紧急情况下,按下急停按钮后,系统所有设备停止运行。
五、详细配置
序号
名称
规格
数量
单位
品牌
1.工作台
1.1
工作台架
1
台
山东栋梁
2.工业机器人本体工作站
2.1
工业机器人
6轴工业机器人本体:
ABBIRB2600
1
台
ABB
机器人控制器:
1
个
示教盒(机器人原厂配套)
1
个
3.打磨组件(1套)
3.1
打磨组件
1
套
山东栋梁
4.防护组件(1套)
4.1
安全防护房
1
套
山东栋梁
六、可完成实训项目
工业机器人基本原理及构成认知
工业机器人本体机构认知
工业机器人电气部分认知
工业机器人控制器认知
六自由度机器人关节运动控制学习与实训
六自由度机器人直线运动轨迹控制学习与实训
六自由度机器人圆弧运动轨迹控制学习与实训
六自由度机器人加减速约束控制学习与实训
机器人控制基本操作实训
机器人坐标系(工具坐标、用户坐标)应用操作实训
机器人操作及示教编程实训
打磨抛光组件原理、结构学习
打磨抛光应用技术
打磨抛光工作台夹具设计


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- DLRB2600 机器人 打磨 抛光 系统
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 国企会计岗位笔试试题及答案解析(分享).docx
国企会计岗位笔试试题及答案解析(分享).docx
-
代办营业执照合同协议书范本模板1.docx
-
工业机械手的PLC控制.doc
-
房屋砖混结构技术标.doc
-
消防工程监理评估报告.doc
-
[精品]杨树生产及存在问题与对策.docx
-
风险管理与金融机构课后附加题参考答案(中文版).doc
-
2021年全国安全知识竞赛经典题库及答案(共260题).docx
-
建筑工程合作协议书、建筑股东合作协议书.doc
-
高中班主任教育叙事3篇.docx
-
嵌入式软件系统期末大作业.docx
-
学校心理危机事件预警及处置预案.docx
-
一年级下册数学竞赛试题精选-.doc
-
二年级音乐学科期末试卷(人教版).doc
-
平顶山学院2021年招聘辅导员试题及答案.docx
-
小学数学应用意识与应用能力的培养课题总结报告.docx
-
企业宣传片初步报价方案.docx
-
市政道路工程设计合同.doc
-
竞赛筹备方案.docx
-
两位数加减两位数不进位不退位教学设计.docx
-
高中学生因病请假制度.docx
-
某某竹木垃圾粉碎加工厂竹木秸杆废弃物粉碎加工综合利用项目建议书.docx
 行政事业单位内部审计流程图(按照新内部审计准则).xls
行政事业单位内部审计流程图(按照新内部审计准则).xls
-
三年级下册道德与法治期末测试卷附答案(完整版).docx
-
疫情期间日常消毒记录表EXCEL模板(完整版).docx
-
商业银行个人信贷操作风险防控要点及案例解析.docx
-
优秀团员、团干评选方案.docx
-
基于PLC的 双门通道控制系统设计.docx
-
《弘扬真善美》教学设计.doc
-
五年级分数计算题.docx
-
西南大学0163答案.docx
-
医院义诊制度.docx
-
员工职业化素养提升(张玉培训师).doc
-
员工职业道德及行为规范.docx
-
员工薪酬满意度调查统计分析报告.doc
-
员工行为奖惩条例.docx
-
员工访谈要点.doc
-
员工销售服务技巧(讲师手册).doc
-
周月工作计划制度.doc
-
呼叫中心漏斗模型管理.doc
-
咨询公司薪酬办法.doc
-
品牌推广部部门职责.doc
-
员工手册(2013年修订).doc
-
国家基本公共卫生项目例会制度.doc
-
国内首部PE业从业人员行为规范颁布.doc
-
房建工程基础知识点大全.docx
-
测绘述职报告.docx
-
度部分家政服务参考价格表.docx
-
E0004人力资源岗位职责说明2.doc
-
制冷工和空调工安全操作规程.docx
-
制药公司财务管理制度暂行办法.doc
