 《结构力学》复习讲义要点.docx
《结构力学》复习讲义要点.docx
- 文档编号:27425419
- 上传时间:2023-06-30
- 格式:DOCX
- 页数:74
- 大小:1.01MB
《结构力学》复习讲义要点.docx
《《结构力学》复习讲义要点.docx》由会员分享,可在线阅读,更多相关《《结构力学》复习讲义要点.docx(74页珍藏版)》请在冰豆网上搜索。
《结构力学》复习讲义要点
第一讲 平面体系的几何组成分析及静定结构受力分析
【内容提要】
平面体系的基本概念,几何不变体系的组成规律及其应用。
静定结构受力分析方法,反力、内力计算与内力图绘制,静定结构特性及其应用。
【重点、难点】
静定结构受力分析方法,反力、内力计算与内力图绘制
一、平面体系的几何组成分析
(一)几何组成分析
按机械运动和几何学的观点,对结构或体系的组成形式进行分析。
(二)刚片
结构由杆(构)件组成,在几何分析时,不考虑杆件微小应变的影响,即每根杆件当做刚片。
(三)几何不变体系
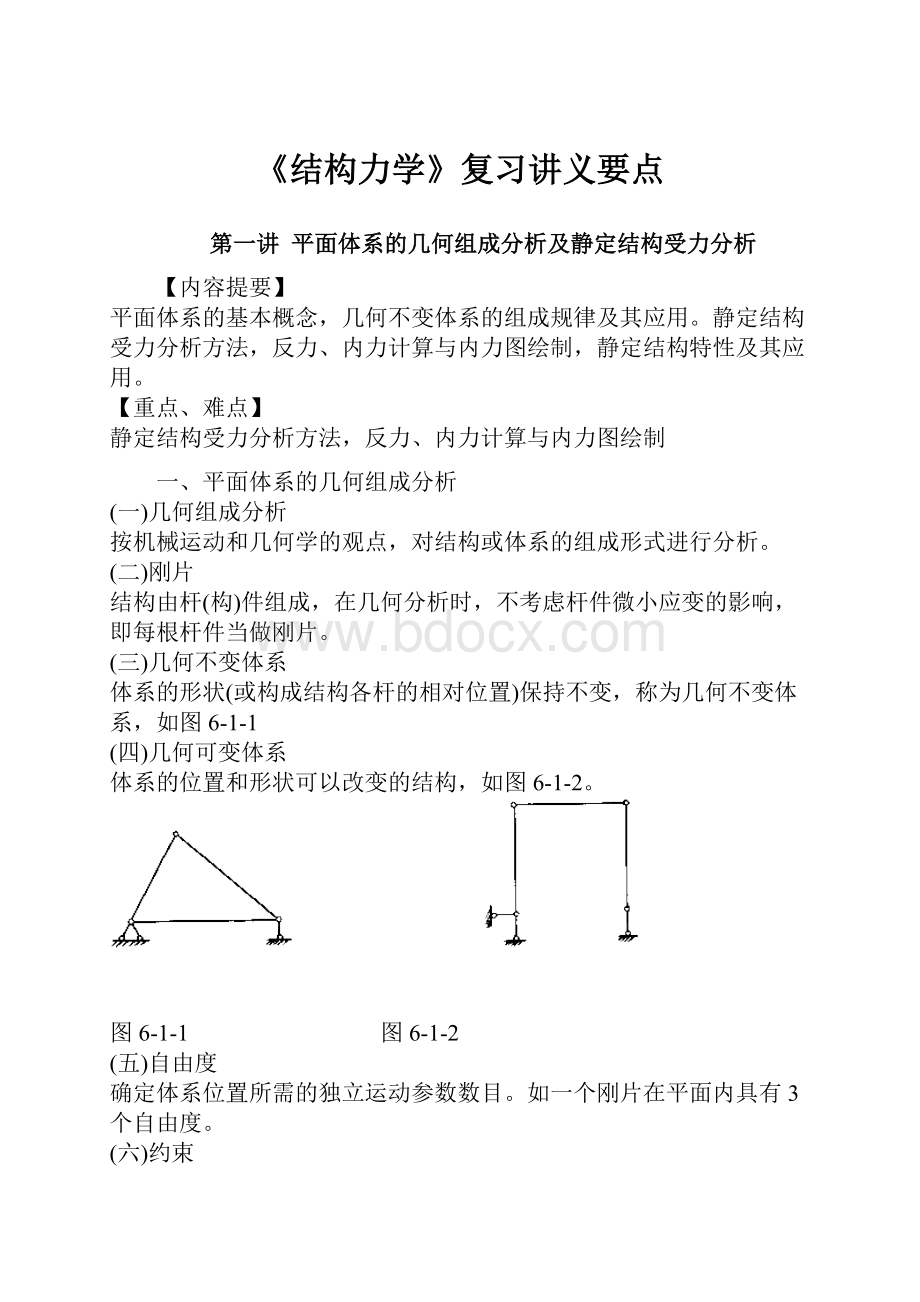
体系的形状(或构成结构各杆的相对位置)保持不变,称为几何不变体系,如图6-1-1
(四)几何可变体系
体系的位置和形状可以改变的结构,如图6-1-2。
图6-1-1 图6-1-2
(五)自由度
确定体系位置所需的独立运动参数数目。
如一个刚片在平面内具有3个自由度。
(六)约束
减少体系独立运动参数(自由度)的装置。
1.外部约束
指体系与基础之间的约束,如链杆(或称活动铰),支座(固定铰、定向铰、固定支座)。
2.内部约束
指体系内部各杆间的联系,如铰接点,刚接点,链杆。
规则一:
一根链杆相当于一个约束。
规则二:
一个单铰(只连接2个刚片)相当于两个约束。
推 论:
一个连接n个刚片的铰(复铰)相当于(n-1)个单铰。
规则三:
一个单刚性结点相当于三个约束。
推论:
一个连接个刚片的复刚性结点相当于(n-1)个单刚性结点。
3.必要约束
如果在体系中增加一个约束,体系减少一个自由度,则此约束为必要约束。
4.多余约束
如果体系中增加一个约束,对体系的独立运动参数无影响,则此约束称为多余约束。
(七)等效作用
1.虚铰
两根链杆的交叉点或其延长线的交点称为(单)虚铰,其作用与实铰相同。
平行链杆的交点在无限远处。
2.等效刚片
一个内部几何不变的体系,可用一个刚片来代替。
3.等效链杆。
两端为铰的非直线形杆,可用一连接两铰的直线链杆代
二、几何组成分析
(一)几何不变体系组成的基本规则
1.两刚片规则
平面两刚片用不相交于一点的三根链杆连接成的体系,是内部几何不变且无多余约束的体系。
推论:
平面两刚片间用一单铰和不通过该铰的一根链杆相连组成一无多余约束的几何不变体系。
2.三刚片连接规则
平面三刚片,若两两之间用不在同一条直线的三铰相连,则三者组成一个几何不变体系且无多余约束。
3.二元片规则
平面上一点和一刚片,若用不在一直线上的两根链杆相连,则两者可以组成一个几何不变整体且无多余约束。
4.一元片规则
由三根不相交于一点的链杆连接一个刚片的装置称为一元片。
推论:
在一体系上增加或除去两元片、一元片不影响原体系的几何不变性。
(二)可变体系
1.常变体系
判据一:
一个结构体系中,联结(约束)的数目少于约束其自由度所必须的数目。
判据二:
两相片之间用三根等长且相互平行的链杆相联。
2.瞬变体系
判据一:
两刚片之间用全交于一点的三根链杆相联。
判据二:
两刚片之间用三根全平行但不等长的链杆相联。
判据三:
刚片之间用位于一直线上的三个铰两两相联。
【例题1】分析图6-1-3体系的几何组成。
解:
铰(Ⅰ,Ⅲ)(Ⅱ,Ⅲ)与链杆1、2在无限远处形成的虚铰(Ⅰ,Ⅱ)在同一直线上,为瞬变体系。
【例题2】分析图6-1-4的几何组成。
解:
两刚片用三根不交于一点的链杆1,2,3相连,为几何不变体系且无多余约束。
图6-1-3 图6-1-4
【例题3】分析图6-1-5的几何组成。
解
(1)分析图a中的体系
首先,三角形ADE和AFG是两个无多余约束的几何不变体系,分别以Ⅰ和Ⅱ表示。
I与基础Ⅲ间的链杆I、2相当于瞬铰B,Ⅱ与基础Ⅲ间的链杆3,4相当于铰C。
A、B、C三个铰不共线,则体系为无多余约束的几何不变体系。
(2)分析图b中的体系
先把折线杆AC和BD用虚线表示的链杆2与3来替换,于是T形刚片CDE由三个链杆1、2、3与基础相连。
三链杆共点,则体系是瞬变的。
三、静定结构受力分析方法
(一)静定结构
无多余约束的几何不变体系,称为静定结构。
包括静定梁、静定平面桁架、静定平面刚架(含三铰拱)、静定组合结构。
(二)受力分析方法
平面体系有三个自由度,相应静定结构有且只有三个约束未知量(约束反力)。
通过平面刚体的静力平衡条件可建立三个独立方程,解出未知反力,然后按几何组成的逆顺序选择隔离体,求解体系的结构内力。
1. 支座反力计算
2.内力计算
结构受荷载作用,一般在其杆件中会产生轴力N、剪力V和弯矩M,杆件内部这样的力称为内力。
习惯上规定轴力以拉为正,剪力以驱使杆段顺时针方向旋转为正,弯矩一般不规定正负。
某一杆件指定截面的内力计算,通常将之从体系中隔离出来标明其上所有未知力和已知力,然后通过静力平衡方程解出。
图6-1-7
2.多跨静定梁的内力图
静定结构弯矩图的绘制,通常是根据叠加原理,将结构划分为一些梁段,利用简支梁的内力图叠加合成。
【例题6】求作图6-1-8示结构的内力图。
该结构为多跨静定梁。
首先应分清基本结构与附属结构,注意作用在基本结构上的荷载对附属部分内力不产生影响,而作用于附属部分的荷载对支承它的基本部分产生内力。
图6--1-8
3.静定平面刚架
静定平面刚架一般有悬臂式、简支式、三铰式及其组成的复杂静定刚架。
其杆件
受力特点与梁基本相同,应注意的是刚架中的杆件经常承受轴向力。
【例题7】求作图6-1-9所示三铰刚架的内力图。
图6-1-9
四、静定平面桁架的内力计算
(一)桁架
由两端铰接的杆系组成,荷载仅作用在杆与杆相连的铰接点,故杆件仅承受一对等值而反向的轴向力,常称为二力杆。
内力为0的杆称为零杆。
(二)内力解法
1.节点法
以节点为隔离体,作用在桁架节点上的力包括结点荷载(集中力)和杆件轴力,为平面汇交力系。
当未知力不多于2个时,可利用两个独立平衡条件求解。
3.组合结构
组合结构这里指由受弯杆件和二力杆组成的结构。
受力分析时,一般先求出反力,然后按其几何组成逆顺序拆开取隔离体,求出各二力杆的轴力,最后计算受弯杆件的内力。
五、静定结构特性和应用
(1)静定结构满足平衡条件的解答是惟一的。
(2)非荷载因素不引起静定结构的反力与内力。
(3)平衡力系在静定结构中只产生局部作用。
(4)作用于静定结构内几何不变部分荷载作等效变换时,其他部分的约束力和内力不变。
(5)静定结构内几何不变部分作构造上的等效变换时,其他部分的内力和约束反力不变。
第二讲 静定结构位移
【内容提要】
虚功原理、单位荷载法,广义力和广义位移,荷载作用下的静定结构位移计算,图乘法,支座位移和温度变化引起的位移计算,互等定律及其应用。
【重点、难点】
荷载作用下的静定结构位移计算,图乘法。
上式即为线性变形体系的外力附加功与附加变形能的关系,简称附加功原理,上述方程称为附加功方程。
由上可见,附加功原理需要涉及到两个状态,一个状态是取其外力和内力,另一状态则取其位移和变形。
因此,如要应用这一原理,则必须要有两个状态。
而在实际应用时,往往是只提供一个状态——即实际状态,另一状态则是根据分析问题的需要特意假设的——称为虚拟状态。
如果位移是虚设的,就称为虚位移原理,如果外力是虚设的,则称为虚力原理。
因而通常都把附加功原理统称为虚功原理,把附加功方程统称为虚功方程。
图6-2-1
图6-2-6
例题6 例题7图
(A)40/EI (B)20/EI (C)-20/EI (D)26.67/EI
答案:
(B)
解析:
荷载产生的弯矩图为三角形(杆件下侧受拉),虚拟单位力产生的弯矩图为矩形,即A截面转角为顺时针(值为20/EI),
故正确答案选择B。
第三讲 超静定结构受力分析及特性
【内容提要】
超静定次数确定,力法、位移法基本体系,力法方程及其意义,等截面直杆刚度方程,位移法基本未知量确定,位移法基本方程及其意义,等截面直杆的转动刚度,力矩分配系数与传递系数,单结点的力矩分配,对称性利用,半结构法,超静定结构位移计算,超静定结构特性。
【重点、难点】
力法及力法方程,位移法及基本方程;力矩分配系数与传递系数,单结点的力矩分配,超静定结构位移计算。
一、超静定次数
把超静定结构变为静定结构所需要解除的约束数称为超静定次数(或多余约束数)。
1.撤去一个活动铰支座(即一根支杆),或切断一根链杆各相当于解除一个约束。
2.撤去一个固定铰支座(即两根支杆),或拆开一个单铰结点,各相当于解除两个约束。
3.撤去一个固定支座,或切断一根受弯杆件各相当于解除三个约束。
4.将固定支座改为固定铰支座,或将受弯杆件切断改成铰接各相当于解除一个(承受弯矩的)约束。
5.边框周边安置一个单铰则其内部减少一个弯矩约束。
6.一个外形封闭和周边无铰的闭合框或刚架其内部具有三个多余约束,是三次超静定的。
k个周边无铰的闭合框的超静定次数等于3k。
二、力法
(一)基本结构
力法是解算超静定结构最古老的方法之一。
力法计算超静定结构是把超静定结构化为静定结构来计算,所以力法基本未知量的个数就是结构多余约束数。
以超静定结构在外因作用下多余约束(又称多余联系)上相应的多余力作为基本未知量,计算时将结构上的多余约束去掉,代之以多余力的作用,将这样所得的静定结构作为求解基本未知量的基本结构(或称为基本体系)。
(二)解题思路
根据基本结构在原有外力及多余力的共同作用下,在去掉多余约束处沿多余力方向的位移应与原结构相应的位移相同的条件,建立力法方程,解方程即可求得各多余力。
将多余力视为基本结构的荷载,则可作基本结构内力图,也就是原结构的内力图。
原结构的位移计算亦可在基本结构上进行,这样更为方便。
【例题1】求图6-3-1(a)所示结构内力图。
(5)绘出弯矩图。
类似地,可以解出一些常用的简单结构,列于表6-3-1,可为位移法使用。
【例题3】求图6-3-4所示超静定桁架各杆轴力。
各杆EA相等。
图6-3-7
三、位移法
建立解算基本未知量的位移法方程有两种途径:
一种是用位移法的基本结构(或称为基本体系)代替原结构求解来建立位移法方程:
另一种是直接在原结构上利用转角位移方程写出各杆的杆端弯矩和剪力,然后应用平衡条件来建立位移法方程。
(一)基本结构法
1.位移法的基本结构与基本未知量。
【例题8】求如图6-3-9(a)所示刚架内力。
解:
刚架在荷载作用下将发生图示变形。
因在梁及刚架计算中引入了受弯直杆的假定:
即认为受弯直杆在变形前后两端的距离保持不变,故该刚架的结点B与结点C的水平位移相等,均为Z2这样,基本未知量为刚结点B的角位移Z1及结点的独立线位移Z2。
求解时取图6-3-9(b)所示的基本结构,它是在刚结点B处加上附加刚臂以控制其转动,同时在结点C处加上水平的附加链杆以控制结点的独立线位移。
这样,基本结构中的AB杆成为两端固定梁,而BC杆成为B端固定C端铰支梁。
也就是说,基本结构是在原结构上通过添加附加约束(即附加刚臂、附加链杆)使各杆成为单跨超静定梁。
2.建立位移法方程
选取基本结构后,使它承受原有的荷载,并使附加刚臂转动实际的转角Z1及使附加链杆移动实际的线位移Z2如图6-3-9(b)中所示。
此时,基本结构的变形情况和受力情况便与原结构相同,并且,基本结构附加刚臂上的反力矩R1和附加链杆上的反力R2均应等于零。
即
图6-3-16
【解】 1)结构二次超静定。
2)力矩的分配与传递每次只能在一个结点上进行,因此传递到对另一结点力矩是不平衡的,必须采用反复迭代方式消除不平衡力矩。
计算过程列于图6-3-16:
首先计算分配系数和结点B、C各梁段的固端弯矩,选择由B结点开始第一次分配与传递。
其次C结点开始分配与传递,完成第一次计算。
考察B、C结点两边弯矩差别仍较大,可如上进行第二次分配与传递
最后,将固端弯矩与各次分配、传递弯矩叠加,得最终弯矩图
五、对称性的利用
【例题12】试利用结构的对称性用位移法计算图6-3-17所示刚架,并绘出最后弯矩图。
第四讲 结构动力特性与动力反应
【内容提要】
自由度体系周期、频率计算,简谐荷载与突加荷载作用下简单结构的动力系数、振幅与最大动内力,阻尼对振动的影响。
一、概念
(一)动力荷载
荷载大小、方向和作用位置随时间而改变。
按时间可分为周期荷载、冲击荷载、突加恒载和随机荷载。
(二)动力问题的特征
结构在动荷载作用下,其上质点产生惯性力,抵抗变形还产生阻尼力,因此,结构的内力和位移成为时间的函数。
(三)动力响应
结构在动荷载作用下产生的动内力和动位移,统称为动力响应(动力反应)。
它不仅与动荷载有关,还与结构动力特征(固有频率、振型和阻尼)有关。
(四)动力自由度
描述一个体系在振动过程中全部质点的位置所需要的独立变量数目。
二、单自由度体系的振动方程
1.按平衡条件建立振动方程——刚度法
或
图6-4-2
图6-4-3
据此可以作出振型图.
【例题1】分析图6-4-6(a)、(c)、(e)、(g)、(i)所示体系的自由度。
不计杆件的分布质量。
图6-4-6(g)所示体系有两个质点,杆件可发生弹性弯曲变形,质点有竖向和水平的两个位移分量,
这两个位移相互独立,故有两个自由度。
加支杆确定时如图6-4-6(h)所示。
图6-4-6(i)所示体系有两个质点,质点有竖向两个位移分量和水平向一个位移分量,这三个位移相互独立,
故有三个自由度。
加支杆确定时如图6-4-6(j)所示。
图6-4-14


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 结构力学 结构 力学 复习 讲义 要点
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《C12343098汽轮机操作规程》要点.docx
《C12343098汽轮机操作规程》要点.docx
-
《钢丝绳芯输送带硫化接头标准》.docx
-
《建筑装饰CAD》课程标准.docx
-
《劳动合同书》范本下载.docx
-
《普通话实用训练教程》教案 1.docx
-
《上海星河湾土方道路景观铺装景观建筑景观小品绿化种植及配套水电安装工程施工组织设计》教学.docx
-
#2#014年护士执业资格考试考前押题卷实践能力.docx
-
《繁荣世界守护者》图文流程攻略.docx
-
《工业设计机械基础》复习题.docx
-
《机电一体化系统设计》思考题.docx
-
《Java项目实训》课程设计计算器要点.docx
-
《赤壁赋》必修一9.docx
-
《工商企业经营管理》重点复习题供参考.docx
-
《审计准则第1322号公允价值计量和披露的审计》指南全解.docx
-
《索溪峪的野》课堂教学实录文档资料.docx
-
《餐饮服务与管理》教学计划复习进程.docx
-
《花卉栽培》试题库完整.docx
-
《经络学B》答案.docx
-
《身边地化学物质》知识点汇总情况.docx
-
《5鲁滨逊漂流记》教学设计和教案附同步练习.docx
-
《送别组诗》教案.docx
-
《Visual Basic程序设计基础》课后习题参考答案.docx
-
《创新与企业家精神》.docx
-
《詹天佑》教学反思说课稿教学设计教材.docx
-
《风力发电机组设计方案与制造》课程设计方案任务书.docx
-
《最后的姿势》教学设计.docx
-
1楼无机保温砂浆外墙外保温涂料饰面1分解.docx
-
5篇学校工作开展情况述职报告.docx
-
6届高三上学期一轮纠错生物试题附答案.docx
-
《图书馆学概论》知识点.docx
-
《语言学导论》期末复习及练习.docx
-
02煤矿电能质量治理技术的研究与应用计划任务书.docx
-
信托法颁布实施后的中国信托制度体系研究.docx
-
我国农村剩余劳动力转移过程中人力资源开发问题研究.docx
-
西式面点师分类试题面包类糕点制作.docx
-
研发与技术创新管理.docx
-
一下口算练习.docx
-
小型桥梁施工方案.docx
-
效率评价软件EMS说明书.docx
-
英语四六级作文必背短语短句.docx
-
信托单位及最新信托单讲解.docx
-
普通高等学校招生全国统一考试英语模拟卷一附带答案及详细解析.docx
-
浅析当前道路交通事故认定的乱象及整改设想.docx
-
人教版初中英语必备常见短语汇总按字母表顺序T开头.docx
-
软件需求规格说明书模板.docx
-
上海常见鸟类资料.docx
-
生理学课后练习题二细胞的基本功能.docx
-
室外排水系统工程施工方案.docx
-
水利工程旁站监理实施细则详细.docx
-
塔吊租赁招标书 长沙融科项目.docx
-
土石方开挖专项安全措施.docx
