 整理振型向量正交性.docx
整理振型向量正交性.docx
- 文档编号:27177499
- 上传时间:2023-06-27
- 格式:DOCX
- 页数:14
- 大小:170.21KB
整理振型向量正交性.docx
《整理振型向量正交性.docx》由会员分享,可在线阅读,更多相关《整理振型向量正交性.docx(14页珍藏版)》请在冰豆网上搜索。
整理振型向量正交性
第五节振型向量正交性
对多自由度系统振动问题的分析与两自由度系统没有本质上的区别.只是由于自由度上的增多导致数学上计算变得复杂多了.因此,在研究多自由度系统振动问题时,应找由一种便于分析的方法,这就是模态分析法〔振型叠加法〕为此,首先讨论有关耦合与解耦的方法.
一、耦合与解耦〔教材6.7和6.8〕
举例说明什么是耦合与解耦.
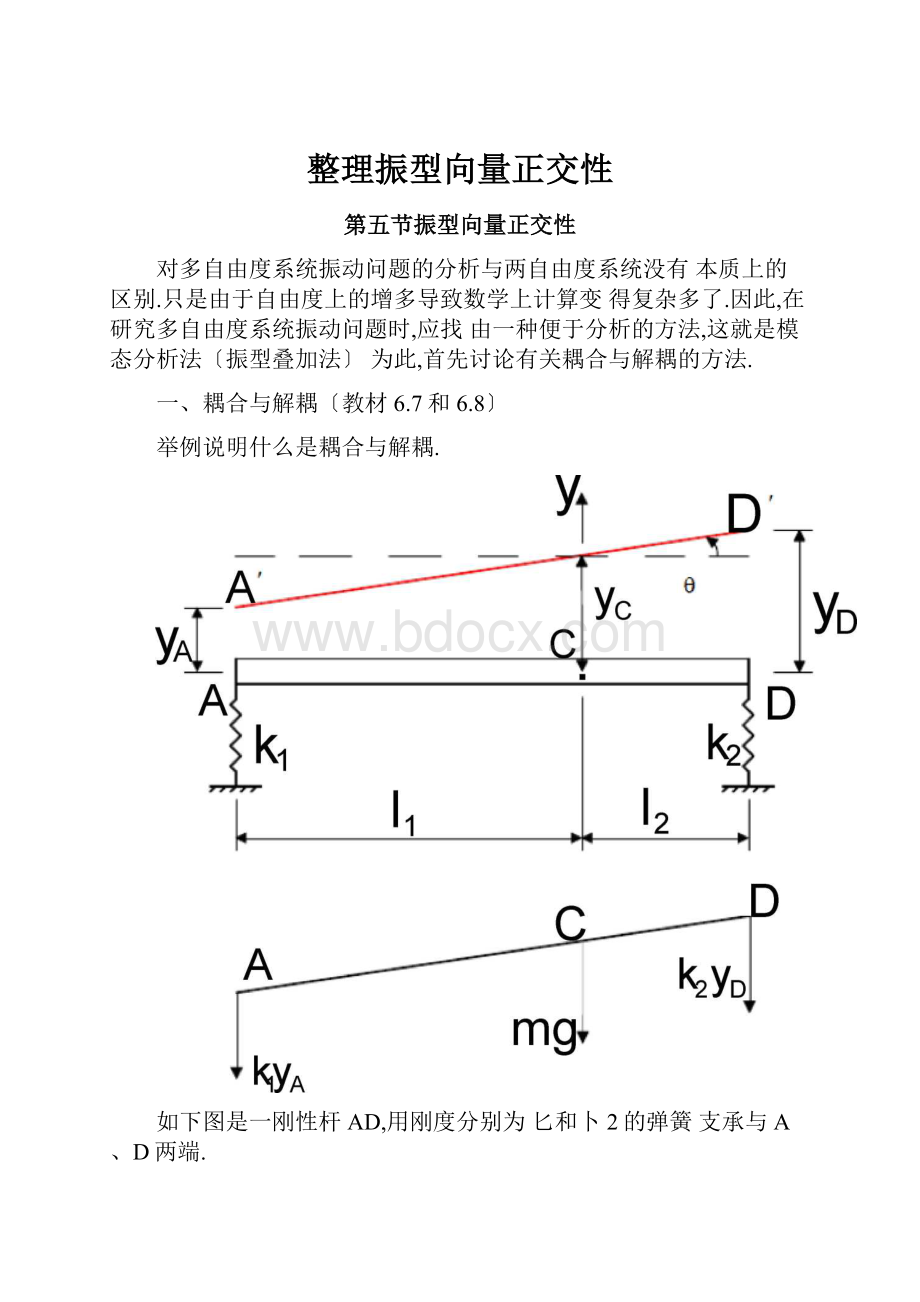
如下图是一刚性杆AD,用刚度分别为匕和卜2的弹簧支承与A、D两端.
(1)取质心C点的垂直位移yC和刚性杆绕C点的转角日为广义坐标.那么刚性杆在振动中任一瞬时的受力如图所示.由几何关系,得
11yD12yA
•yc=
\Va=yc-1i0I1+I2
yD=yc3-yD-yA
1u=
1112
由牛顿运动定律,的系统的振动微分方程为
myc=kiyA-k?
yD
a(a)
JkiyAli-k2yD12
式中m是刚性杆AD的质量,J是刚性杆AD绕质心C的转动惯量.整理式(a),得
myck1k2yck212-k111口=0
122⑸
Jk212-k111yck1112k21;口=0
写成矩阵的形式
m0yckik2k212-ki1iyc0
二,HJI"I22I"L'r?
(c)
_0Jk212-ki1iki1i2k21〞I10
在上式中,质量矩阵是一个对角矩阵,反映在方程组中,就是两个微分方程的第一个方程仅包含一个广义坐标的二阶导数(加速度)yc,第二个方程仅包含另一个广义坐标的二阶导数由,这种加速度(惯性力)之间没有耦合的情况,称之为惯性解耦.刚度矩阵是非对角矩阵,反映在
方程组中,也就是两个微分方程的每一个方程都包含广义坐
标yC和日,这种坐标之间有耦合的情况,称之为弹性耦合(静力耦合).
(2)如果在杆上另取一点B,令AB=l3=11-e,31
BD=I4=I2+e,其中e=BC,且令
以B点的纵坐标yB和杆的转角日为广义坐标,那么系统的振动微分方程为
myBmJI〔k「k2〕yB=0
meyB〔Jme2〕』〔kKkzl:
尸=0写成矩阵形式
mmeyBk1k20yBIT0
22.2
_meJme0k1l3k2141riJ0
在新的坐标写生的方程中,刚度矩阵是一个对角矩阵,
反映在方程组中,就是两个微分方程的第一个方程仅包含一个广义坐标yB,第二个方程仅包含另一个广义坐标日,这种坐标之间没有耦合的情况,称之为弹性解耦〔静力解耦〕.
而质量矩阵是非对角矩阵,反映在方程组中,也就是两个微分方程的每一个方程都包含广义坐标的二阶导数yC和JI,这
种加速度〔惯性力〕之间有耦合的情况,称之为惯性耦合.
(3)假设以弹簧支承处的位移y』DyD为广义坐标,那么振
动微分方程为
m12yAml』Dk1〔l1l2〕yAk2〔lil2〕yD=0
-JyAJyD-k1〔l1l2〕liyAk2〔l1l2〕l2yD=0
写成矩阵形式
ml2
-J
ml1/ak1〔l1l2〕
.Hu+i.zi.xi
J」!
yDIL-k[〔l1L〕l1
k2〔l1l2〕yA0
k2〔l1*l2>21IyDJI0J
由此可见此时,刚度矩阵和质量矩阵都不是对角矩阵,即方程组中同时存在着惯性耦合和弹性耦合
有以上分析可以看由,同一个振动系统可以选择不同的广义坐标来建立它的运动方程.但假设选择的坐标不同,系统的运动方程的形式和耦合情况也不同.这说明:
运动方程的
耦合并不是振动系统所固有的本性,而完全取决于坐标的选
择.即〔k】和IM】与选取的坐标系有关.换句话说,描述系统的坐标系不同,那么Ik1和[M]也不同.
我们知道,求解一个耦合的运动方程是十分复杂的,尤其是实际工程问题,有的系统自由度多达上百数千,因此即使利用计算机求解这样一个耦合的方程组,也是十分困难的.但如果选取的坐标恰好使系统的运动微分方程组的耦合项全等于零,既无弹性耦合,又无惯性耦合,也就是使质量矩阵和刚度矩阵同时为对角矩阵,那么n个联立的微分方程就成为n个独立的微分方程了,于是求解就很容易了.
二、振型正交性(教材6.12)
一个n个自由度系统具有n个固有频率和n组对应的振
型向量.设第i阶固有频率为«对应的振型为{uL,那么有
।Ili
如下的关系
〔kMUj=切.[MMu-(a)
同样缶nj和Q}j也满足
1】{田j=.2j[M]{u}j(b)
用〈u'j前乘以(a)两端,用Uu\前乘以(b)两端,得
{/:
Ik】{u'=屋叱皿】“(c)
:
u「kHu)j=QuJmMu](d)
由于Ik1和【M】都是对称矩阵,那么将(d)式两边转置,得
UTIkHuL=WQ}T【MMuL(e)
j।njj।
(c)—(e),得
(2i-;j):
u>MMu'i=0(f)
在一般情况下,当i,j时,6nl=缶nj,所以有
\}丁[MHuL=0(4-45)
ji\,
将上式代入(e)式,得
(u1:
[kM/j=0(4-46)
对应于不同固有频率的两个振
式(4-45)和(4-46)表示,
型向量之间存在着对质量矩阵IM】和刚度矩阵Ik1的正交
性.这个性质就称为振型向量正交性.
将式(a)两边前乘以1/j,得
..TT..
{5.【kKuL=eni{/.【MKuL(g)
।iniii
令
Mi=U:
[MMu[(i=1,2,,n)(h)
因质量矩阵IM】是正定的,那么Mj总是一个正实数.称为第i阶主质量.
Ki=U:
比几;(i=1,2,,n)称为第i阶主刚度.
那么由式(g),得
由此可见,第i阶固有频率的平方就等于第i阶主刚度除以第i阶主质量
、主质量矩阵和主刚度矩阵
把n个振型向量依次排列,构成一个n阶方阵,记为
U)1P)2।卜
U1U1
称为振型矩阵.那么
Mi
那么上式变成
M10III0
UT〔MH-ui
0M2III0
IIIIIII
00IIIMn
称为主质量矩阵〔模态质量矩阵〕
K10III0
0K2III0
IIIIIIII
_00IIIKn
称为主刚度矩阵〔模态刚度矩阵〕
例题2:
验证振型正交性.
对于图示系统〔例1〕
m1=m2=m3=m,k1=k2=k3=k4=k
m002k-k0
质量矩阵[M,m0,刚度矩阵[k】=j-k2k-k
_00m_0k2k
系统的三个固有频率
22-\2k五22\5k
'n1=:
'n2'I,'n3=\
im\m।m
振型向量为
111
'u'=\2,*u,2=0,'u'3=一'2
IdIdIdI
工1,「1,L1,
证:
m001
U:
[MHu)=1V2"0m0;l0?
L--J
W0m」[-1.
1
=Lm五mmj{0}=m+0-m=0
-1J
2k-k01
u:
*八)2=1V21k2k-k0
W-k2kJ[-1
1
=[(2-6)k2(2-V2)k(2-V2)k「0,
-1.
=(2-\2)k0-(2-\2)k=0
m001
M1={/:
[M=172110m0;?
.IIl_」
00m1
1
=m2mm=4m
、2
1
2k-k01
Ki=3:
[k"*=[1V2"-k2k-k;?
.
0-k2k1
1
二(2-Q)k2(\2-1)k(2-\2)k\2
1
=(2-\2)k2\2(\2-1)k(2-\2)k
=4(2-'2)k
2」=4(2=2)k=(2-\2)k
n1一/一一
M14mm
Mi
四、正那么振型向量和正那么〔主〕坐标
1.正那么振型向量
由于振型向量仅表示各坐标间幅值的相对大小.因此,只有通过归一化,这才能确定振型向量中元素的具体数值.
所以,如果归一化不同,那么由振型向量构成的振型矩阵,按下式计算时
M10III0
」T……0M2III0
uMu=:
uIIIIII
00IIIMn
求得的主质量Mi的值各不相同.
故为了方便起见,将各阶振型向量正那么化,令
1.,
{中}二^^{/[(i=1,2,III,n)(6-48)
Mi
称为第i阶正那么振型向量
T,1,T1..
i'M卜i=-=ui'M7"
(6-49)
VMi\/Mi
即正那么振型向量所对应的主质量等于1
T1T1
「k『u「ki''u;
6-50)
1,Mi\/Mi1
1
Ki=ni(i=1,2,III,n)
M,
把n个正那么振型向量依次排列,构成一个n阶方阵,记
那么矩阵心】称为正那么振型矩阵
由于正那么振型向量是振型向量中的特定一组,因此正那么振型向量也满足振型向量正交性.即
「T'MH:
=0(i,j=1,2,IIIn,i二j)
=0(i,j=1,2,IIIn,i=j)
所以有
[Jm「
.2
n1
〈X(t)}=体]{z(t)}(6-51)
那么(z(t)}=以z211141T称为正那么主坐标,简称正
那么坐标.将(6-51)式代入多自由度系统的振动微分方程,
得
1M:
:
Z(tyk":
I;z(t))=:
F(t):
上式两边前乘以[①
1:
1TlMM」z(ty」'1T1"一‘Nt)「匕-F(ty
令
中⑴}=[①lT{F(t)}(6-53)
为对应于正那么坐标的鼓励力.那么有
(6-52)
:
Zt>[」z(t))=:
P(t>
展开上式,得
.ZnJnZ,二Pn(t)
上式是采用正那么坐标来描述的系统振动微分方程,是最简单
的运动方程式,它是n个独立的微分方程.因而求解就很容易了.


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 整理 向量 正交
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《C12343098汽轮机操作规程》要点.docx
《C12343098汽轮机操作规程》要点.docx
-
《钢丝绳芯输送带硫化接头标准》.docx
-
《建筑装饰CAD》课程标准.docx
-
《劳动合同书》范本下载.docx
-
《普通话实用训练教程》教案 1.docx
-
《上海星河湾土方道路景观铺装景观建筑景观小品绿化种植及配套水电安装工程施工组织设计》教学.docx
-
#2#014年护士执业资格考试考前押题卷实践能力.docx
-
《繁荣世界守护者》图文流程攻略.docx
-
《工业设计机械基础》复习题.docx
-
《机电一体化系统设计》思考题.docx
-
《Java项目实训》课程设计计算器要点.docx
-
《赤壁赋》必修一9.docx
-
《工商企业经营管理》重点复习题供参考.docx
-
《审计准则第1322号公允价值计量和披露的审计》指南全解.docx
-
《索溪峪的野》课堂教学实录文档资料.docx
-
《餐饮服务与管理》教学计划复习进程.docx
-
《花卉栽培》试题库完整.docx
-
《经络学B》答案.docx
-
《身边地化学物质》知识点汇总情况.docx
-
《5鲁滨逊漂流记》教学设计和教案附同步练习.docx
-
《送别组诗》教案.docx
-
《Visual Basic程序设计基础》课后习题参考答案.docx
-
《创新与企业家精神》.docx
-
《詹天佑》教学反思说课稿教学设计教材.docx
-
《风力发电机组设计方案与制造》课程设计方案任务书.docx
-
《最后的姿势》教学设计.docx
-
1楼无机保温砂浆外墙外保温涂料饰面1分解.docx
-
5篇学校工作开展情况述职报告.docx
-
6届高三上学期一轮纠错生物试题附答案.docx
-
《图书馆学概论》知识点.docx
-
《语言学导论》期末复习及练习.docx
-
02煤矿电能质量治理技术的研究与应用计划任务书.docx
-
新冠肺炎疫苗接种工作策划方案三篇.docx
-
内蒙古包头市届高三理综化学部分下学期开学考试试题.docx
-
农村卫生医疗工作情况报告.docx
-
铁路转正申请书范文.docx
-
劳动就业服务中心消防工程施工组织设计.docx
-
盘点工作分析总结报告.doc
-
出租合同集锦9篇.docx
-
旅游的基本概念及其测度研究.docx
-
职业资格考试幼儿园保育员职业技能考试试题及解析.docx
-
手术室医师演讲稿与手术室护士演讲范文推荐汇编.docx
-
七年级数学上册解方程专项练习 119.docx
-
四川省城市二次供水管理办法.docx
-
企业办村建帮扶活动汇报完整版.docx
-
小学唐诗三百首带拼音.docx
-
小学老师实习报告范文.docx
-
锌粉项目实施方案申请材料.docx
-
青岛版小学数学三年级上册《面积和面积单位》课堂教学实录.docx
-
幼儿园大班数学教学计划教学提纲.docx
-
中国食用盐行业快速做大市场规模策略研究报告.docx
