 控制仪表与计算机控制装置第五章执行器.ppt
控制仪表与计算机控制装置第五章执行器.ppt
- 文档编号:2714605
- 上传时间:2022-11-08
- 格式:PPT
- 页数:75
- 大小:1.08MB
控制仪表与计算机控制装置第五章执行器.ppt
《控制仪表与计算机控制装置第五章执行器.ppt》由会员分享,可在线阅读,更多相关《控制仪表与计算机控制装置第五章执行器.ppt(75页珍藏版)》请在冰豆网上搜索。
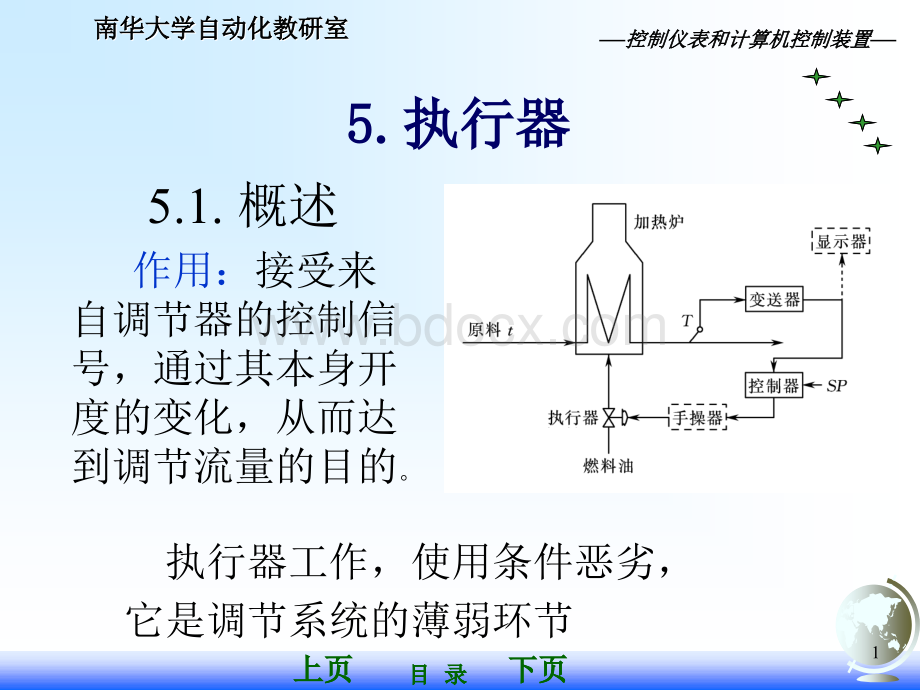
控制仪表和计算机控制装置控制仪表和计算机控制装置南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室上页上页下页下页目目录录上页上页下页下页目目录录5.5.执行器执行器作用:
接受来自调节器的控制信号,通过其本身开度的变化,从而达到调节流量的目的。
执行器工作,使用条件恶劣,它是调节系统的薄弱环节5.1.概述1控制仪表和计算机控制装置控制仪表和计算机控制装置南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室上页上页下页下页目目录录上页上页下页下页目目录录执行器由执行机构和调节机构两个部分构成辅助装置:
阀门定位器利用负反馈原理改善执行器的性能手操机构用于人工直接操作执行器5.1.2.执行器的构成执行器的构成2控制仪表和计算机控制装置控制仪表和计算机控制装置南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室上页上页下页下页目目录录上页上页下页下页目目录录
(1)按使用的能源形式分类:
气动执行器、电动执行器和液动执行器气动调节阀电动调节阀气动调节阀采用气动执行机构:
薄膜式活塞式输出直线位移l输出角位移直行程式调节机构角行程式调节机构长行程式5.1.3.5.1.3.执行器的分类及特点执行器的分类及特点3控制仪表和计算机控制装置控制仪表和计算机控制装置南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室上页上页下页下页目目录录上页上页下页下页目目录录电动调节阀采用电动执行机构:
直行程式角行程式输出直线位移l直行程式调节机构输出角位移角行程式调节机构4控制仪表和计算机控制装置控制仪表和计算机控制装置南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室上页上页下页下页目目录录上页上页下页下页目目录录
(2)按使用的调节机构分类:
直通双座调节阀直通双座调节阀直通单座调节阀直通单座调节阀蝶阀蝶阀笼式(套筒)调节阀笼式(套筒)调节阀凸轮挠曲调节阀凸轮挠曲调节阀角型调节阀角型调节阀V型球阀型球阀三通调节阀三通调节阀O型球阀型球阀高压调节阀高压调节阀隔膜调节阀隔膜调节阀波纹管密封调节阀波纹管密封调节阀超高压调节阀超高压调节阀小流量调节阀小流量调节阀低噪音调节阀低噪音调节阀直行程式调节机构角角行行程程式式调调节节机机构构同同一一类类型型的的气气动动调调节节阀阀和和电电动动调调节节阀阀,分分别别采采用用气气动动执执行行机机构和电动执行机构构和电动执行机构执行器的分类执行器的分类5控制仪表和计算机控制装置控制仪表和计算机控制装置南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室上页上页下页下页目目录录上页上页下页下页目目录录(3)(3)气动调节阀气动调节阀优点:
结构简单、动作可靠稳定、输出力大、优点:
结构简单、动作可靠稳定、输出力大、安装维修方便、价格便宜和防火防爆安装维修方便、价格便宜和防火防爆缺点:
响应时间大,信号不适于远传缺点:
响应时间大,信号不适于远传采用电采用电/气转换器或电气转换器或电/气阀门定位器,使传送信号气阀门定位器,使传送信号为电信号,现场操作为气动信号。
为电信号,现场操作为气动信号。
电动调节阀电动调节阀优点:
优点:
动作较快、能源获取方便动作较快、能源获取方便特别适于远距离的信号传送特别适于远距离的信号传送缺点缺点:
输出力较小、价格贵,输出力较小、价格贵,一般只适用于防爆要求不高的场合一般只适用于防爆要求不高的场合执行器的特点执行器的特点6控制仪表和计算机控制装置控制仪表和计算机控制装置南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室上页上页下页下页目目录录上页上页下页下页目目录录反作用:
当输入信号增大时,流过执行器的流量减小正作用:
当输入信号增大时,执行器的开度增大,即流过执行器的流量增大5.1.4.执行器的作用方式执行器的作用方式执行器的正反作用由执行机构的正反作用和调节机构的正反作用组合实现。
7控制仪表和计算机控制装置控制仪表和计算机控制装置南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室上页上页下页下页目目录录上页上页下页下页目目录录5.2.执行机构的作用:
根据输入控制信号的大小,产生相应的输出力F和位移(直线位移l或角位移)输出力F用于克服调节机构中流动流体对阀芯产生的作用力或作用力矩,以及摩擦力等其他各种阻力;位移(l或)用于带动调节机构阀芯动作执行机构执行机构8控制仪表和计算机控制装置控制仪表和计算机控制装置南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室上页上页下页下页目目录录上页上页下页下页目目录录正作用:
输入信号增加,执行机构推杆向下运动反作用:
输入信号增加,执行机构推杆向上运动执行机构作用方式执行机构作用方式9控制仪表和计算机控制装置控制仪表和计算机控制装置南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室上页上页下页下页目目录录上页上页下页下页目目录录气动执行机构接受气动调节器或阀门定位器输出的气压信号,并将其转换成相应的输出力F和直线位移l,以推动调节机构动作。
气动执行机构主要分为两大类:
薄膜式(常用)活塞式(适于要求有大推力场合)薄膜式与活塞式执行机构又可分为有弹簧和无弹簧两种5.2.1.气动执行机构气动执行机构10控制仪表和计算机控制装置控制仪表和计算机控制装置南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室上页上页下页下页目目录录上页上页下页下页目目录录结构结构1-上膜盖;2-波纹膜片3-下膜盖;4-支架5-推杆;6-压缩弹簧7-弹簧座;8-调节件9-连接阀杆螺母10-行程标尺
(1)气动薄膜式执行机构11控制仪表和计算机控制装置控制仪表和计算机控制装置南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室上页上页下页下页目目录录上页上页下页下页目目录录当信号压力通入由上膜盖1和膜片2组成的气室时,在膜片上产生一个向下的推力,使推杆5向下移动压缩弹簧6,当弹簧的反作用力与信号压力在膜片上产生的推力相平衡时,推杆稳定在一个对应的位置,推杆的位移l即为执行机构的输出,也称行程。
工作原理工作原理12控制仪表和计算机控制装置控制仪表和计算机控制装置南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室上页上页下页下页目目录录上页上页下页下页目目录录气动薄膜式执行机构的力平衡方程式为a)a)静态特性静态特性非线性偏差小于5,回差小于35气动薄膜式执行机构的特性气动薄膜式执行机构的特性13控制仪表和计算机控制装置控制仪表和计算机控制装置南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室上页上页下页下页目目录录上页上页下页下页目目录录(b)b)动态特性动态特性14控制仪表和计算机控制装置控制仪表和计算机控制装置南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室上页上页下页下页目目录录上页上页下页下页目目录录长行程执行机构特点:
行程长输出力矩大
(2)气动活塞式执行机构)气动活塞式执行机构主要由活塞和气缸构成,活塞在气缸内随活塞两侧压差而移动。
有两位式和比例式二种。
15控制仪表和计算机控制装置控制仪表和计算机控制装置南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室上页上页下页下页目目录录上页上页下页下页目目录录比例式活塞执行机构信号输入PM1M2P1P21322档板1喷嘴13喷嘴2推杆活塞调零弹簧16控制仪表和计算机控制装置控制仪表和计算机控制装置南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室上页上页下页下页目目录录上页上页下页下页目目录录构成原理构成原理接受010mADC或420mADC的输入信号,并将其转换成相应的输出力F和直线位移l或输出力矩M和角位移5.2.2.电动执行机构电动执行机构17控制仪表和计算机控制装置控制仪表和计算机控制装置南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室上页上页下页下页目目录录上页上页下页下页目目录录作用:
将伺服放大器输出的电功率转换成机械转矩伺服电机实际上是一个二相电容异步电机,由一个用冲槽硅钢片叠成的定子和鼠笼转子组成,定子上均匀分布着两个匝数、线径相同而相隔90电角度的定子绕组W1和W2。
(1)伺服电机伺服电机18控制仪表和计算机控制装置控制仪表和计算机控制装置南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室上页上页下页下页目目录录上页上页下页下页目目录录作用:
将输入信号和反馈信号进行比较,得到差值信号,并根据的极性和大小,控制可控硅交流开关、的导通或截止。
可控硅交流开关、用来接通伺服电机的交流电源,分别控制伺服电机的正、反转或停止不转
(2)伺服放大器伺服放大器19控制仪表和计算机控制装置控制仪表和计算机控制装置南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室上页上页下页下页目目录录上页上页下页下页目目录录作用:
将电动执行机构输出轴的位移线性地转换成反馈信号,反馈到伺服放大器的输入端。
位置发送器包括:
位移检测元件和转换电路位移检测元件用于将电动执行机构输出轴的位移转换成mV或电阻等信号,常用的位移检测元件有差动变压器、塑料薄膜电位器和位移传感器等;转换电路用于将位移检测元件输出信号转换成伺服放大器所要求的输入信号,如0-10mA或4-20mA直流电流信号。
(3)位置发送器位置发送器20控制仪表和计算机控制装置控制仪表和计算机控制装置南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室上页上页下页下页目目录录上页上页下页下页目目录录作用:
将伺服电机高转速、小力矩的输出功率转换成执行机构输出轴的低转速、大力矩的输出功率,以推动调节机构。
直行程式的电动执行机构中,减速器还起到将伺服电机转子的旋转运动转变为执行机构输出轴的直线运动的作用。
减速器一般由机械齿轮或齿轮与皮带轮构成。
(4)减速器减速器21控制仪表和计算机控制装置控制仪表和计算机控制装置南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室上页上页下页下页目目录录上页上页下页下页目目录录伺服放大器是一个具有继电特性的非线性环节,为不灵敏区无输出;输出215V伺服电机接通电源:
伺服电机工作在恒速状态,故为一个积分环节,减速器和位置发送器为比例环节。
因此,电动执行机构的动态特性主要取决于伺服电机的特性,即具有积分特性伺服电机停止转动时:
或为比例特性电动执行机构的特性电动执行机构的特性22控制仪表和计算机控制装置控制仪表和计算机控制装置南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室上页上页下页下页目目录录上页上页下页下页目目录录智能式电动执行机构优点:
定位精度高;推杆行程的非接触式检测;更快的响应速度,无爬行、超调和震荡现象;具有通讯功能;具有数据诊断和处理功能23控制仪表和计算机控制装置控制仪表和计算机控制装置南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室上页上页下页下页目目录录上页上页下页下页目目录录调节机构是执行器的调节部分,在执行机构的输出力和输出位移作用下,调节机构阀芯的运动,改变了阀芯与阀座之间的流通截面积,即改变了调节阀的阻力系数,使被控介质流体的流量发生相应变化。
5.3.5.3.调节机构调节机构24控制仪表和计算机控制装置控制仪表和计算机控制装置南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室南华大学自动化教研室上


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 控制 仪表 计算机控制 装置 第五 执行
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 保育笔记.doc
保育笔记.doc
-
北京地区成人学士学位英语统一考试真题及答案.docx
-
幼儿园外出活动安全应急预案.doc
-
形容词变副词规律.doc
-
新概念英语第一册阶段测试题(01--12).doc
-
中班幼儿发展分析报告.doc
-
新概念英语第一册Lesson1-20测试题.doc
-
幼儿园安全教育宣传稿2-3月份.doc
-
描写山水风光的古诗词.doc
-
大学英语B题库阅读四.doc
 幼儿园日常安全检查记录表.xls
幼儿园日常安全检查记录表.xls
-
汽车涂装术语中英文对照.xls
-
1993年全国高考数学试题.doc
-
-简谐运动的图像.doc
-
幼儿园教职工安全培训记录.wps
-
世界主要国家及首都对照表(中英文).doc
-
-渗透作用原理说课稿.doc
-
电大远程网络教育大学英语B统考题库真题.doc
-
2010年江苏省高考化学试卷及解析.doc
-
2012年辽宁省高考数学试卷(文科)答案与解析.doc
-
2006年全国化学竞赛初赛模拟试卷(02).doc
-
幼儿园一日常规检查记录表.xls
-
自考英语二教材课文讲义unit.docx
-
全国高等教育自学考试英语词汇学试题及答案.doc
-
18年高考真题理科数学(全国2卷).doc
-
2008高中化学竞赛初赛模拟试卷(11).doc
-
2012年6月福建省高中生物会考试题.doc
-
1989年全国高考数学文科.doc
-
1994年全国高考数学试题.doc
-
2011年浙江普通高中学业水平考试通用技术试卷及答案.doc
-
1997年全国高中学生化学竞赛(初赛)试题.doc
-
2011年辽宁省高考数学试卷(理科)答案与解析.doc
-
酒店酒店餐饮部精细化管理与服务规范.docx
-
煤矿信息化管理制度.docx
-
居留权案1.docx
-
精选初中九年级上册物理第十三章 欧姆定律第四节 电阻的串联与并联鲁教版习题精选第六十九篇.docx
-
精选讲座主持词九篇.docx
-
开题报告用于模式分类的特征选取方法研究.docx
-
免疫规划工作计划.docx
-
考试题.docx
-
九年级班级工作计划三篇.docx
-
科介人力资源商业计划书.docx
-
逆向物流的分析与发展.docx
-
九年级英语9B UNIT 3 教案.docx
-
课文鸬鹚的教学设计.docx
-
农村民主评议党员总结 民主评议党员自我鉴定.docx
-
暖通空调设计技术资料总结secret.docx
-
劳动合同格式范本简单版.docx
-
老子说观后感.docx
-
理综模拟试题+答案新课标.docx
-
丽江级专家科研工作站.docx
![机动车检测人员试题库[含答案].doc](/Images/s.gif)