 IIR数字滤波器实现.docx
IIR数字滤波器实现.docx
- 文档编号:26963079
- 上传时间:2023-06-24
- 格式:DOCX
- 页数:12
- 大小:144.17KB
IIR数字滤波器实现.docx
《IIR数字滤波器实现.docx》由会员分享,可在线阅读,更多相关《IIR数字滤波器实现.docx(12页珍藏版)》请在冰豆网上搜索。
IIR数字滤波器实现
IIR数字滤波器实现(mantlab+C语言)
题目:
16k采样率音频数据下采样到8k采样率
求解方案分析:
直接每隔一个取一个采样值,这样就可以得到8k采样率的数据。
但是这样明显会有问题。
按照采样率变换理论,首先应该通过一个低通滤波器,滤掉[pi/2,pi]这个区间上的频率,以防止下采样造成的频率混叠。
这个低通滤波器在很多书上都用FIR滤波去实现,并且可以用FIR滤波的多相结构去实现。
这样滤波和下采样过程可以互换位置。
即先下采样再进行多相FIR滤波。
在嵌入式设备上FIR滤波会占用较长的时间,为此,我们可以采用IIR滤波器来做。
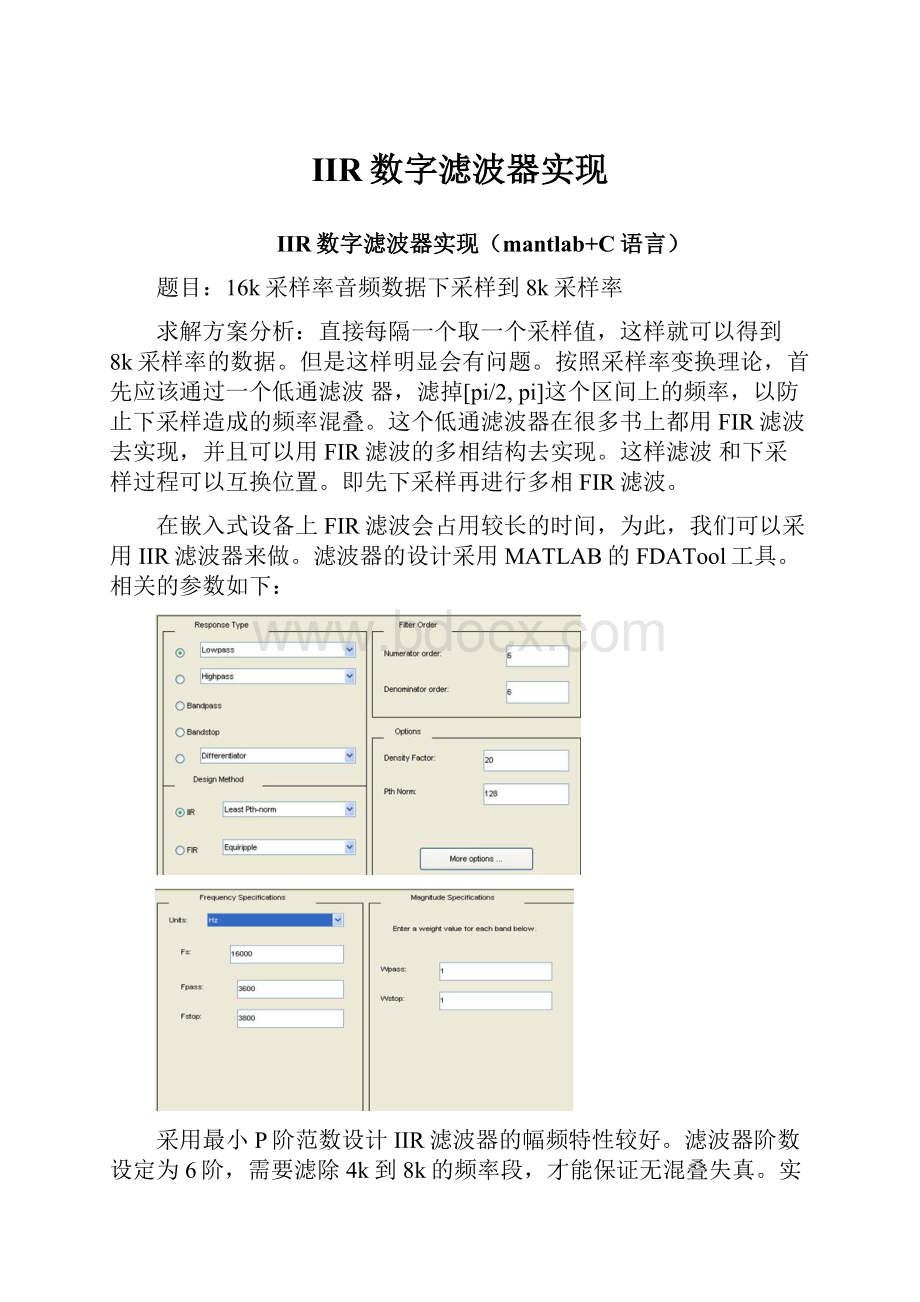
滤波器的设计采用MATLAB的FDATool工具。
相关的参数如下:
采用最小P阶范数设计IIR滤波器的幅频特性较好。
滤波器阶数设定为6阶,需要滤除4k到8k的频率段,才能保证无混叠失真。
实际由于滤波器的特性没法做到理想的状态,选择滤波器截止频率为3800hz,3600到3800为过渡带宽。
其它选项采用默认设置。
设计的滤波器幅度响应如下图:
生成的滤波器系数文件如下:
/*
*FilterCoefficients(CSource)generatedbytheFilterDesignandAnalysisTool
*
*GeneratedbyMATLAB(R)7.6andtheSignalProcessingToolbox6.9.
*
*Generatedon:
03-Dec-201010:
41:
03
*
*/
/*
*Discrete-TimeIIRFilter(real)
*-------------------------------
*FilterStructure :
Direct-FormII,Second-OrderSections
*NumberofSections :
3
*Stable :
Yes
*LinearPhase :
No
*/
/*GeneraltypeconversionforMATLABgeneratedC-code */
#include "tmwtypes.h"
/*
*Expectedpathtotmwtypes.h
*D:
/MATLAB/R2008a/extern/include/tmwtypes.h
*/
#define MWSPT_NSEC 7
const int NL[MWSPT_NSEC]={1,3,1,3,1,3,1};
const real64_T NUM[MWSPT_NSEC][3]={
{
0.09065504059673, 0, 0
},
{
1, -0.132********53, 0.9999674089086
},
{
1, 0, 0
},
{
1, 0.1670351201308, 0.9999889247428
},
{
1, 0, 0
},
{
1, 1.417032671609, 0.9978019623105
},
{
1, 0, 0
}
};
const int DL[MWSPT_NSEC]={1,3,1,3,1,3,1};
const real64_T DEN[MWSPT_NSEC][3]={
{
1, 0, 0
},
{
1, -0.40321085647, 0.7334254033056
},
{
1, 0, 0
},
{
1, -0.6868636040216, 0.2670185171768
},
{
1, 0, 0
},
{
1, -0.2880720042256, 0.9480010462991
},
{
1, 0, 0
}
};
上述系数是3个2阶节IIR结构的级联。
可以转换为我们熟悉的b/a的形式如下:
double a[3][3]={
{1, -0.6868636040216, 0.2670185171768},
{1, -0.40321085647, 0.7334254033056},
{1, -0.2880720042256, 0.9480010462991}
};
double b[3][3]={
{1, 1.417032671609, 0.9978019623105},
{1, 0.1670351201308, 0.9999889247428},
{1, -0.1323122149853, 0.9999674089086},
};
注意上面系数文件中还有一个增益:
double.0906********;
这个增益最好在第一级实现以后加入运算。
这样可以减小误差,保证数据动态范围不被溢出。
尤其是在定点计算的时候尤为如此。
2阶节IIR滤波的直接实现
一个2阶节结构是下面这样一个表达式:
实现上面这个表达式需要4个过去的历史值,把它定义在结构体
typedef struct tag_IIR_State_2order
{
float y2;
float y1;
float x1;
float x0;
} IIR_State_2order;
调用下面函数之前需要把上述结构体所有值初始化为零。
滤波按一帧一帧数据进行。
#define ONE_FRAME_SAMPLE_SIZE 1024
void cy_signal_filter_by_iir(signed short* pcmIn, IIR_State_2order* filter_state, float a[], float b[], signed short*pcmOut)
{
int i;
float x2;
float tmp;
for ( i =0; i < ONE_FRAME_SAMPLE_SIZE; i++)
{
x2 = filter_state->x1;
filter_state->x1 = filter_state->x0;
filter_state->x0 = pcmIn[i];
tmp =( float )(b[0]* filter_state->x0 + b[1]* filter_state->x1 +
b[2]* x2 - a[1]* filter_state->y1 - a[2]* filter_state->y2);
if(tmp >=32767)
{
tmp =32767;
}
if(tmp <=-32768)
{
tmp =-32768;
}
pcmOut[i]=(signed short)tmp;
filter_state->y2 = filter_state->y1;
filter_state->y1 = tmp;
}
}
有一个简单的技巧可以把上面的计算简化,使得历史状态数由4减少为2。
定义下面的表达式:
结构体定义如下:
typedef struct tag_IIR_State_2order
{
float st1;
float st2;
} IIR_State_2order;
void cy_signal_filter_by_iir(signed short* pcmIn, IIR_State_2order* filter_state, float a[], float b[], signed short*pcmOut)
{
int i;
float st;
float Tmp_fl;
for ( i =0; i < ONE_FRAME_SAMPLE_SIZE; i++)
{
st =(float)(pcmIn[i]- a[1]* filter_state->st1 - a[2]* filter_state-> st2);
Tmp_fl = b[0]* st + b[1]* filter_state->st1 + b[2]* filter_state->st2;
filter_state->st2= filter_state->st1;
filter_state->st1 = st;
if(Tmp_fl >=32767.0)
{
Tmp_fl =32767;
}
if(Tmp_fl <=-32768)
{
Tmp_fl =-32768;
}
pcmOut[i]=(signed short)Tmp_fl;
}
}
6阶节IIR滤波的实现
有个上面的基础,我们来实现上面设计的6阶IIR滤波器。
6阶节分解为3个2阶节级联实现。
每个2阶节需要2个历史状态,总共需要6个历史状态。
结构体定义如下:
typedef struct tag_IIR_State_3Order
{
double w01;
double w02;
double w11;
double w12;
double w21;
double w22;
}IIR_State_6order;
代码中数组a,b,还有gain的定义见第一部分。
void cy_signal_filter_by_6th_iir(signed short* pcmIn, IIR_State_6order* filter_state, int sample_size)
{
double x1, x2, x3, Tmp_f00, Tmp_f10, Tmp_f20;
int i;
double Tmp_pcm;
for (i =0; i < sample_size; i++)
{
Tmp_pcm = pcmIn[i];
Tmp_f00 = Tmp_pcm - a[0][1]* filter_state->w01 - a[0][2]* filter_state->w02;
x1 = Tmp_f00 + b[0][1]* filter_state->w01 + b[0][2]* filter_state->w02;
filter_state->w02 = filter_state->w01;
filter_state->w01 = Tmp_f00;
x1 = gain * x1;
Tmp_f10 = x1 - a[1][1]* filter_state->w11 - a[1][2]* filter_state->w12;
x2 = Tmp_f10 + b[1][1]* filter_state->w11 + b[1][2]* filter_state->w12;
filter_state->w12 = filter_state->w11;
filter_state->w11 = Tmp_f10;
Tmp_f20 = x2 - a[2][1]* filter_state->w21 - a[2][2]* filter_state->w22;
x3 = Tmp_f20 * b[2][0]+ b[2][1]* filter_state->w21 + b[2][2]* filter_state->w22;
filter_state->w22 = filter_state->w21;
filter_state->w21 = Tmp_f20;
if (x3 >=32767)
{
x3 =32767;
}
if (x3 <=-32768)
{
x3 =-32768;
}
pcmIn[i]=(signed short)x3;
}
}
最后看下滤波的效果:
滤波之后的频谱:
滤波效果不错,下面可以进行下采样了。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- IIR 数字滤波器 实现
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《崔万志演讲观后感》.docx
《崔万志演讲观后感》.docx
-
《赤壁赋》理解性默写.docx
-
《匆匆》读书笔记15篇.docx
-
《公共政策概论》简答题题库.docx
-
《建设行政执法制度》.docx
-
《平凡的世界》读后感10篇.docx
-
《AUTO CAD》课程标准 2.docx
-
《搭石》课堂教学实录与评析2篇.docx
-
《广东省GSP认证现场检查项目》粤食药监.docx
-
《触摸春天》教案集合9篇.docx
-
《教育评价学》练习题库及答案.docx
-
《公差配合与测量》教案.docx
-
《软件工程》单项选择题答案.docx
-
《网页设计与制作Dreamweaver》试题附答案.docx
-
《易经》与中医学的关系.docx
-
①临床科室医疗质量管理记录册模板.docx
-
###经济开发区企业知识产权情况调研报告.docx
-
《别踩白块度典范版》设计计划文档.docx
-
《村居》教案模板合集七篇.docx
-
《高老头》读后感15篇.docx
-
《故乡》课堂教学实录.docx
-
《鉴定要素细目表》知识.docx
-
《脊椎病因治疗学》word版.docx
-
《马克思主义基本原理概论》考试真题及答案.docx
-
《人性论》读后感人性论读后感3000字.docx
-
《淘气包马小跳》读后感10篇.docx
-
《网页设计与制作》课程标准.docx
-
《小学音乐识谱教学有效性策略的研究》课题研究的中期报告.docx
-
《助产学》考试试题及答案01.docx
-
3分钟熟记精深中医针灸顺口溜附穴位图.docx
-
11大税种税法记忆口诀和计算方法.docx
-
《百家讲坛》观后感20篇.docx
-
监理资料规范化管理的工作方法资料Word文件下载.docx
-
高中政治第二单元探索世界的本质第五课把握思维的奥妙教学案新人教版必修4Word文档下载推荐.docx
-
贵州省贵阳乐湾国际实验学校北师大贵阳附中九年级上学期第一次月考化学试题文档格式.docx
-
测量系统分析管理程序Word文档下载推荐.docx
-
勤政廉洁做表率优化作风树形象 党建党委Word文档下载推荐.docx
-
湖北省宜昌市届九年级化学上册期中试题Word文档格式.docx
-
河南省郑州市第二中学学年高二文理分科考试开学考试生物试题扫描版含答案文档格式.docx
-
常用的地图投影Word下载.docx
-
车辆维修检验单文档格式.docx
-
胎儿在母体内10个月的生长发育过程图文Word格式文档下载.docx
-
成语大全四字成语大全成语词典高中成语高中常用成语大全高中成语大全及解释成语词典Word下载.docx
-
华为广告项目策划书文档格式.docx
-
教你如何做DJWord格式文档下载.docx
-
夹层施工组织设计Word文件下载.docx
-
初中心理健康教育工作计划3篇文档格式.docx
-
初级社会工作者《社会工作实务》真题及答案Word文件下载.docx
-
XX青年节讲话稿 青年节发言稿Word文档格式.docx
-
大班学期工作总结4篇Word文档下载推荐.docx
-
初一数学上册计算题大全284Word文档格式.docx
