 组态王水位控制.docx
组态王水位控制.docx
- 文档编号:26873943
- 上传时间:2023-06-23
- 格式:DOCX
- 页数:28
- 大小:248.21KB
组态王水位控制.docx
《组态王水位控制.docx》由会员分享,可在线阅读,更多相关《组态王水位控制.docx(28页珍藏版)》请在冰豆网上搜索。
组态王水位控制
汽包水位控制设计
1.工艺流程:
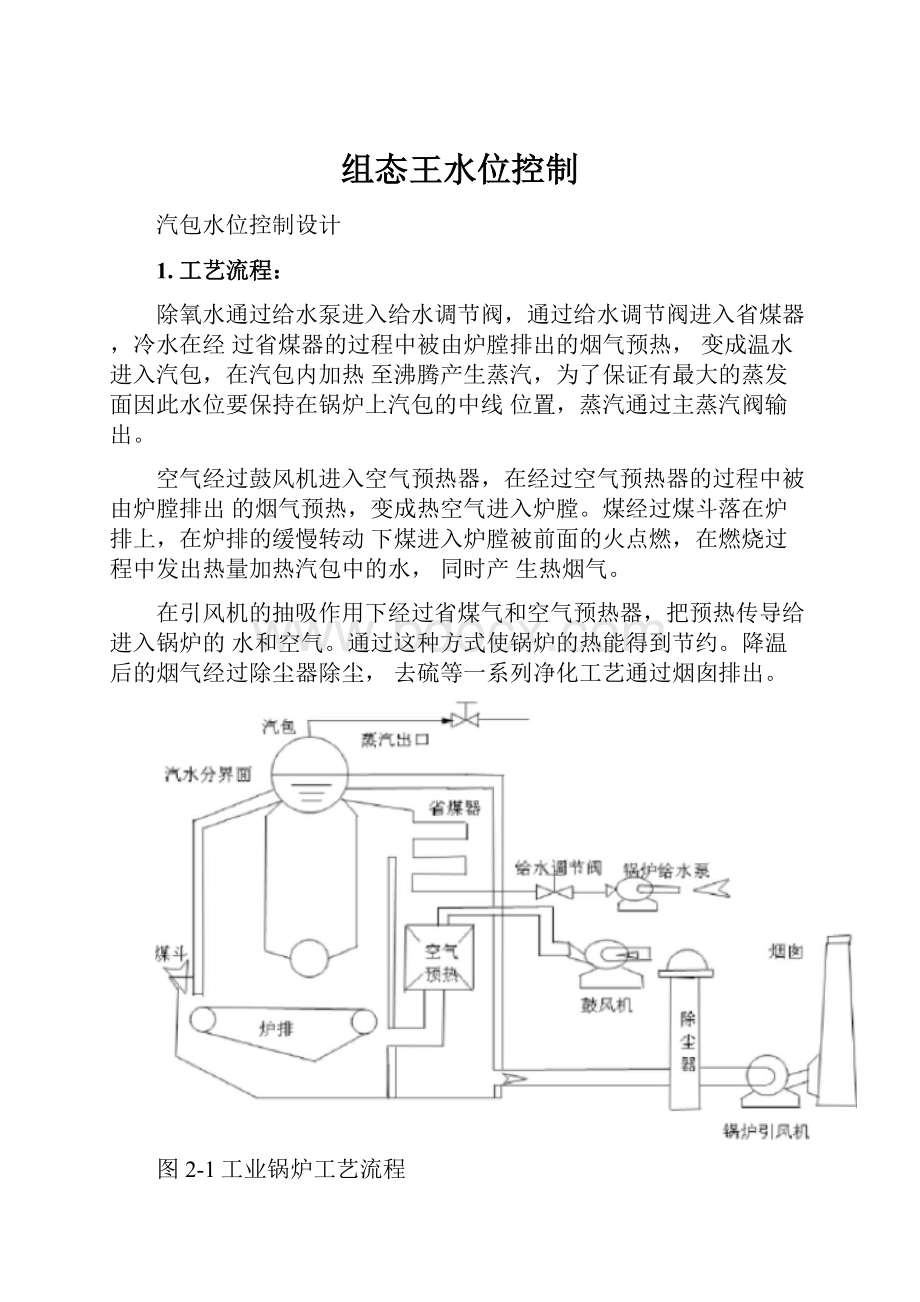
除氧水通过给水泵进入给水调节阀,通过给水调节阀进入省煤器,冷水在经过省煤器的过程中被由炉膛排出的烟气预热,变成温水进入汽包,在汽包内加热至沸腾产生蒸汽,为了保证有最大的蒸发面因此水位要保持在锅炉上汽包的中线位置,蒸汽通过主蒸汽阀输出。
空气经过鼓风机进入空气预热器,在经过空气预热器的过程中被由炉膛排出的烟气预热,变成热空气进入炉膛。
煤经过煤斗落在炉排上,在炉排的缓慢转动下煤进入炉膛被前面的火点燃,在燃烧过程中发出热量加热汽包中的水,同时产生热烟气。
在引风机的抽吸作用下经过省煤气和空气预热器,把预热传导给进入锅炉的水和空气。
通过这种方式使锅炉的热能得到节约。
降温后的烟气经过除尘器除尘,去硫等一系列净化工艺通过烟囱排出。
图2-1工业锅炉工艺流程
2.系统设计任务
该系统通过PID控制调节电子调节阀的开度,以使锅炉汽包液位按给定值变化。
且当系统干扰变化时,液位能最终稳定在给定值。
该液位监控系统由水箱控制对象系统、I/O接口板、计算机和组态王软件组成。
根据题目要求,详细分析液位监控系统的设计要求,并进行软硬件的总体设计。
在完成总体设计后,进行硬件的详细设计,利用组态王软件完成锅炉液位监控系统的设计工作。
同时进行控制软件的流程设计和编制工作,并用仿真PLC完成控制软件的仿真调试工作。
根据汽包锅炉给水系统动态特性,我们可以确定给水控制的一些基本思想。
(1)由于对象的内扰动特性存在一定延迟和惯性,若采用以水位为被调量的单回路系统,则控制中水位会出现较大的偏差,所以我们设计采用串级控制方案。
由于对象在蒸汽内负荷扰动时,有“虚假水位”的现象,若采用单回路系统,则在扰动的初始阶段,调节器将给水流量变化相反的方向,从而夸大了锅炉进、出流量的不平衡。
所以我们采用串级前馈控制,串级控制系统和单回路系统相比控制效果更稳定,响应速度更快,进度高,前馈控制可以改善给水控制系统的控制品质。
(2)锅炉的给水系统,汽包液位的动态特性似乎与单容水槽一样,但是实际情况却要复杂的多。
其中最突出的一点就是水循环系统中充满了夹带着大量的蒸汽气泡的水,而蒸汽气泡的总体积是随着气泡压力和炉膛热负荷的变化而改变的。
如果有某种原因使蒸汽泡的总体积改变了,即使水循环系统中的总水量没有变化,汽包水位也会随之发生改变。
于是,我们采用电厂锅炉汽包水位控制常用的单级三冲量给水控制系统。
变送岩
襲茫疣童前馈装苦義岚洗量列莹E隹蛊
汽包極
11给水涯飲装订一给狗曲當十
单级三冲量控制系统具有如下优点:
相对单冲量和双冲量控制系统,其控制品质最好,能有效地满足系统对快速性、稳定性、准确性的要求,能有效地避免“虚假水位”现象。
综上所述,本系统应选用水位串级控制。
主回路用于直接控制水位,主调节器一般都采用比例积分动作,维持水位不变。
副回路是流量系统,副调节器可以用比例或比例积分动作。
结合题意设计系统框图如下:
Kw
Gp(s)
Kh
其中,Hr――水位设定值
W——给水量
H-
水位值
Gc1
(s)――主控制器
Gc2
(s)副控制器
Gp
(s)――被控对象传递函数
Kd
――蒸汽流量检测变送器放大倍数
Kw
――给水流量检测变送器放大倍数
Kh
――水位检测仪表放大倍数
4.在组态王内部是以I/O变量来存储外部信号的状态和数值的,必须把这些不同的变量与外部信号之间的对应关系做出明确的定义,才能够正确的设计出控制程
序。
对于锅炉液位控制系统,有两个摸拟信号需要输入到计算机:
锅炉液位。
工业控制机有一个模拟信号需要输出到电动调节阀。
输入信号:
(1)汽包液位
(2)流量
输出信号:
调节阀的动作
其中汽包液位和流量可以为模拟量,调节阀的动作是开关量。
3、计算机控制系统设计
1、硬件
DCS空制系统(体系结构)
组成:
监控层——操作员站、工程师站
控制层——IPC+过程通道(ADAM50Q0
现场层——现场设备(传感器、变送、执行器)——(模拟信号、开关信号)硬件选型
列表说明:
气动调节阀型号厂家输入型号行程作用
分配IO点,例如
L1,水箱液位,4-20mA0-10m,备注
(1)传送器选型由于该设计的目的是控制气泡水位平衡,而整个控制系统的基础为水位的精确测量,只有水位的测量精确,才能使整个系统的稳定性更好,控制质量更高。
合理的选择水位传感器是整个控制系统的关键。
已知汽泡水位应该控制在80cm,根据过程控制仪表选择原则:
所选传送器的最大量程应为:
0到160cm而且汽
泡水位应该控制在80cm左右,因此所选传感器精度应该高于0.5%FS,因此满足该测量精度才可以满足要求。
再者液位变送器的选择还要考虑到其灵敏度,其对信号的反应速度要足够快,因为这样可以提高系统的工作效率,使系统能够快速的调节,扰动的影响,增强系统的调节作用,是系统更稳定。
采用型号为:
CYB31—II系列变送器其主要参数为:
量程:
0〜100cm(水位高度)
精确度:
±0.5%FS
输出信号:
4〜20mA(二线制)0〜5V,1〜5V,0〜10V(三线制)供电电压:
24V(12〜36V)
负载电阻:
R=(U-12.5)/0.02-Rd
防护等级:
IP67
响应时间:
w1ms
使用时可使用24V直流电源供电以保证传感器的正常工作。
(2)执行器选型
此系统的执行器选择控制阀,因为它可以直接改变给水量,反应时间短,有利于系统控制品质的改善,它是控制系统一个非常重要的环节,它接收控制器的输出信号,执行最终任务,气动控制阀分为气开和气关两种形式。
控制阀开关形式的选择应根据一下三个方面考虑:
1)从工艺生产安全的角度考虑。
主要考虑当漏气或控制阀门出现故障时,应避免破坏设备和伤人。
事故情况下控制阀处于关闭状态危害性小,则应选气开发,例如,加热炉燃料一般选择气开阀,以保证在控制阀失气时能处于全关状态切断进炉燃料,从而避免加热炉温度过高造成事故。
2)从介质特性上考虑。
如果介质是易凝,易结晶,易聚合的的物料,控制阀开关形式选择应考虑介质的这些特性。
防止控制阀失气时阀门关闭,停止蒸汽进入而导致再沸器和塔内液体的结晶和凝聚,造成堵塞。
如果介质易结焦,则一般选择气开阀。
3)保证产品质量,经济损失最小的角度考虑。
当事故发生时尽量减小原料和动力消耗,但要保证产品质量。
当汽泡数量增多时阀门相应关闭以免浪费,当汽泡数量少时阀门相应打开,保证蒸汽质量。
控制阀口径选择是否合适直接影响控制效果。
在不同的自控系统中,由于参数千差万别,在选择阀口径时,要严格计算阀孔径,来提高控制系统的控制质量。
3).控制器器选型
控制器是控制系统的核心部件,它将测量变送信号与给定值比较产生偏差信号,并按一定的控制规律对该偏差进行运算,输出的信号送执行器。
控制器的选择主要包括控制规律的选择和正、反作用方式的选择。
1)控制规律选择
比例控制器(P)
比例控制是最基本的控制规律,其特点是控制规律简单,调整方便;缺点是会使系统产生余差,虽然通过增加比例放大系数可以减小余差,但是系统稳定程度降低。
所以比例控制系统适用于控制通道滞后及时间常数均较小,干扰幅度较小,负荷变化不大,控制质量要求不高,允许有余差的场合。
比例积分控制(PI)
比例积分控制是使用最多,应用最广的的控制规律,在反馈控制系统中约有75%是采用PI控制规律的。
积分作用的引入,使系统具有消除余差的能力。
另外积分作用的滞后特性有利于减小高频噪音的影响。
但是加入积分作用后,会使系统稳定性降低,必须减小比例放大系数以保持系统原有的稳定。
对于容量滞后较小,负荷变化不太大,工艺参数不允许有余差的场合。
比例微分控制器(PD)
由于微分作用的引入,使系统具有超前控制功能,因而控制更加及时,可有效减小动态偏差,适用于控制对象容量滞后较大的场合。
比例积分微分控制(PID)
其综合了各种控制规律的优点,所以适当调整静态增益,积分时间,微分时间,可以使系统获得较高的控制质量。
一般来说其适用于容量滞后较大,负荷变化大,控制质量要求高的场合。
综上分析本设计选择PID控制器,因为本设计对控制器控制质量要求高,切锅炉负荷变化大。
2)控制器正、反作用选择
对于一个闭环控制系统来说,若要使系统稳定,系统应采用负反馈。
在实际系统分析中,为了保证能够成负反馈控制系统,主要考虑控制器,被控对象,测量变送器各个环节放大系数KC、Kv、Ko、Km的符号连乘得负。
只要事先知道了对象,控制阀,测量变送器放大系数的正负,再根据系统各个环节放大系数乘积必须为负的原则,很容易就能确定控制器的正反作用方式。
环节正负的确定:
输入增加,输出也增加,则该环节放大系数符号为正,反之输出减小则为负,
本设计给水流量选择气关阀Kv小于零,又已知系统其他环节增益为正,所以当阀门打开时给水量增加,输入副控制器的偏差减小,应使输入执行器的信号增加而使阀门开度减小使给水量减少,所以副控制器为正作用,主回路当给水量增多时气泡水位上升输入主控制器偏差减小为保证副控制器输入信号为正主控制器应为反作用。
AI—808型人工智能控制器,是功能增强型的控制器,其具备外给定,手动自动切换,手动自整定和显示输出值功能。
能精确控制温度,压力,流量,液位等各种物理量。
其参数如下:
控制方式:
AI人工智能调节及PID调节
输入规格:
S=33,1〜5V电压输入
输入下限显示值:
一般为DIL=0
输入上限显示值,液位一般为DIH=100
输出方式:
4〜20mA线性电流输出
系统功能选择:
CF=0为内部给定,反作用调节
(4)锅炉液位控制系统I/O型变量分配表
变量名
变量类型
连接设备
寄存器
报警组
锅炉液位HK
I/O实型
研华PCL
锅炉液位报
警
水箱液位
I/O实型
研华PCL
调节阀开度UK
I/O实型
研华PCL
2.3锅炉液位控制系统I/O型变量数值范围
变量名
最小
值
最小原始
值
最大
值
最大原始
值
读写属
性
米样频
率
数据类
型
HK
0
2457
400
4095
只读
200ms
Short
水箱液
位
0
2457
400
4095
只读
200ms
Short
UK
0
0
100
4095
只写
200ms
Short
表2.4锅炉液位控制系统内存型变量分配表
变量名
变量类型
最小值
最大值
初始值
水泵启动
内存离线
0
关
给定液位HR
内存实型
0
100
PID控制比例系数KP
内存实型
0
100
1
阀门比例系数KI
内存实型
0
100
0
时间常数T1
内存实型
0
100
20
采样周期T
内存实型
0
100
0.5
泄水阀门
内存离散
关
锅炉出水流体状态
内存整型
0
4
0
水箱进水流体状态
内存整型
0
4
0
水箱泄水流体状态
内存整型
0
4
0
锅炉进水流体状态
内存整型
0
4
0
2、软件
组态软件:
数据采集、逻辑控制、连续控制(闭环)、监控画面、
报表、数据库、网络通讯(OPC
系统控制框图
流程图
程序
实验流程
第一章
1.1课程设计目的
1、熟悉并熟练掌握组态王软件;
2、通过组态王软件的使用,进一步掌握了解过程控制理论基础知识;
3、培养自主查找资料、搜索信息的能力;
4、培养实践动手能力与合作精神。
1.2课程要求
“组态王”软件包括由工程浏览器和画面运行系统三大部分组成。
在工程浏览中可以查看工程的各个组成部分,也可以完成数据库构造、定义外部设备等工作;工程管理器中内嵌了画面管理系统,用于新工程的创建和已有工程的管理。
画面的开发和运行由工程浏览器调用画面制作系统和运行系统来完成。
用组态王对一个简单控制过程进行组态,要求画出组态画面,能进行动画连接,可以模拟查询数据报表、历史数据曲线以及报警画面。
题目是水位控制系统,是对象为一储水罐,用水泵从水源抽水作为进水端,阀门控制出水端,中间有水位传感器。
做一水位控制系统的组态,要求:
动画显示水流运动。
当水位高于或低于警戒水位时,报警界面出现,提示报警,并记录在报警事件中。
设置登录权限,只有管理员才能启动系统,只有在此时水泵才可启动,其余权限中人员只能观看不能操作。
组态中有历史曲线与数据报表,用来记录长时间过程中水位的变化情况,同时在主监控画面中也显示有即时报警与数据记录的功能
1.3新建工程
使用组态王,首先新建工程“水位控制系统”
图一新建工程
1.1新建画面
进入工程,点击新建工程画面,进入开发系统画面,使用图库创建所需的器件,作图工具绘制其他结构。
图二新建画面
1.2建立仿真系统
选择系统一设备,点击新建设备
图三新建仿真设备
1.3新建数据词典
建立组态系统所需数据变量
订寸-v-
=«brtir
Ulzn
■MMf
1
谢■A
tJ
u
EE3
J■*
4■
LMJ«
>n
iff?
BLfeBM嗨口•创”扉W■車EAIwslQRfcQ■>
■Jh=m=F二=■.-l・li&”w3«rT«L艰/---.r—3II
土as*
IIP
fflAM
X
i^MIB
y
®三
^i"zE
saw®
4
3-
和静
ft
R^Tff®
?
■
伽
阿口降・
环4E虽
smia
EW
mt
*HTf»
円产《
円琵■虫
匚Mtn
fr
QfCAUlW
hPTIB
22
旳
伸日〒出广
访F.
msras
4■土
TF事
23
■felMi
ilH»
启T理
算
ESHU
f|
^i=-«i4>5t
碍j=M
工
id
Wb“
prntt
Jk
奇"IE
工H
J=
KCrM
D£CRf>iN
円hw
尹
图四新建数据词典
共新建水位、水泵运行、启动运行、出水阀门、历史曲线跨度、历史曲线卷动量、行
等所需的数据词典。
1.4各项参数的设置
按钮参数设置
在工具中选择按钮工具,并在主画面中画出如图所示的按钮,分别为管理登陆、退出登录、启动、停止、水位报警、历史曲线、数据报表、退出。
对于启动、停止按钮,双击选择按下时并写入命令语言:
管理登陆:
LogOn();
退出登录:
LogOff();
启动按钮为:
本站点启动运行=1;
停止按钮为:
本站点启动运行=0;
对于水位报警、历史曲线、数据报表、退出这些按钮则是选择弹起时并写入命令语言:
水位报警:
ShowPicture("水位报警");
历史曲线:
ShowPicture("历史曲线");
数据报表:
ShowPicture("数据报表");
退出:
Exit(0);
1.5水位报警画面
在水位报警画面中右键点击,选择动画连接,做如图中所示设置:
刃向运斤伏必
时fflll
2DL5/1/20
汕:
匪血.9
35.001
0
1.6历史曲线画面
1.7数据报表画面
实际所用24行,表示一天24小时用以记录系统在各个时间段内的运行状态,包括:
水位高度、水泵运行情况、出水阀门开合情况等。
建立完毕后在画面中右击,进入画面属性,
选择命令语言,写入相应的命令语言:
if($时==0)
{行=4;}
if($时==1)
{行=5;}
if($时==2)
{行=6;}
if($时==3)
{行=7;}
if($时==4)
{行=8;}
if($时==5)
{行=9;}
if($时==6)
{行=10;}
if($时==7)
{行=11;}
if($时==8)
{行=12;}
if($时==9)
{行=13;}
if($时==10)
{行=14;}
if($时==11)
{行=15;}if($时==12)
{行=16;}
if($时==13)
{行=17;}
if($时==14)
{行=18;}
if($时==15)
{行=19;}
if($时==16)
{行=20;}
if($时==17)
{行=21;}
if($时==18)
{行=22;}
if($时==19)
{行=23;}
if($时==20)
{行=24;}
if($时==21)
{行=25;}
if($时==22)
{行=26;}
if($时==23)
{行=27;}
启动运行==0)
设置好报表所用各元素;
定义函数string;
判断系统运行状态;
//报表=1;
stringss;
本站点
{ss="关";}
else
{ss="开";}
ReportSetCellString("实时报表",行,2,ss);
将运行状态指定到报表第二列;
ReportSetCellValue("实时报表",行本站点水位);
将水位状态指定到报表第三列;
本站点水泵运行==0)判断水泵运行状态;
{ss="关";}
else
{ss="开";}
ReportSetCellString("实时报表",行,4,ss);
将水泵状态指定到报表第四列;
本站点出水阀门==0)判断出水阀门状态;
{ss="关";}
else
{ss="开";}
ReportSetCellString("实时报表",行,5,ss);
1.8历史曲线画面
同样新建画面,命名为历史曲线,在画面中打开工具箱中的图库,选择历史曲线加入到画面中,如上图所示。
查阅组态王帮助文档知道各按钮的意义:
第一排最前面的两个按钮为时间轴左端向左卷动和时间轴左端向右卷动;第一排最后两个按钮为时间轴右端向左卷动和时间轴右端向右卷动。
第二排前面四个按钮为:
时间轴向左平移,时间轴向右平移,时间轴向左平移两倍,时间轴向右平移两倍。
卷动百分比按钮对应卷动百分比量的输入,作用是使趋势曲线的时间轴左移或右移一个百分比,百分比是指移动量与趋势曲线当前时间轴长度的比值。
比如移动前时间轴的范围是12:
00〜14:
00,时间长度120分钟,左移10%即卩12分钟后,时间轴变为11:
48
13:
48
在此按钮后面有两个分别为时间轴百分比左移与时间轴百分比右移。
7200,表示时间调整跨度为2小时。
输入调整跨度按钮用以调整跨度时间,如输入后面有四个不同的时间跨度可以选择。
时间轴缩放按钮显示时间轴的量程。
可以缩小或者放大时间轴。
后面有时间更新按钮,用以将历史曲线时间轴的右端设置为当前时间,以查看最新数据。
最后是参数设置按钮,在软件运行时设置记录参数,包括记录起始时间、记录长度等。
1.9总体命令语言设置
(1)在组态画面全部设置完毕之后,必须写入相应的程序语言,之后仿真PLC才会运
行,整个组态才算是完成。
所以,首先在系统一命令语言中选择应用程序命令语言,将下面
程序写入:
if(启动运行==0)
{
水泵运行=0;
出水阀门=0;
if(启动运行==1)
{
if(水位<5)
{
水泵运行=1;出水阀门=0;
}
elseif(水位>95)
{
水泵运行=0;出水阀门=1;
}
}
else
本站点\$新报
{水泵运行=1;}
(2)关于报警命令语言在命令语言中选择事件命令语言,新建事件命令语言,事件描述为:
I
在发生时框中写入下面程序:
ShowPicture("提示报警");
本站点\$新报警=0;用来实现到达报警条件时系统自动报警的效果。
(3)主画面命令语言右击主画面,选择画面属性—画面命令语言,写入:
第二章
设计结果
对于建立好的组态进行仿真运行,点击画面中文件—切换到View进入演示状态。
在点击水泵,示意水泵抽水,在点击阀门,示意阀门放水,由于进水速度快于出水速度,故系统在正常运行一段时间后,水位会过高,此时系统报警,系统自动关闭水泵,只打开阀门出水,在水位低于底线时,系统再次报警,此时,系统自动打开水泵,从而循环运行。
2.1水位控制画面
停止
T水帮
lib^J
衣伫实眄庇垃
2.2水位报警画面
2.3除氧器画面
iEn«ST
2.4过热蒸汽画面
2.5历史曲线画面
心得体会
通过这次设计,我对组态王的知识了解掌握了很多,对以前的知识有了进一步的拓展和延伸。
开始时觉得这个设计比较难,没办法着手,于是就到网络上查找相关内容来帮助自己。
对自
己所做的题目;基于组态王的水位控制系统设计相关的内容的搜索,如何将平时教师里所学
的知识运用到其中。
我怕经过设备的配置,构造数据词典变量,设计图形界面,建立动画连接,运行和调试,报告的完成,这一系列的过程后,我不仅解决了


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 组态 王水 控制
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《崔万志演讲观后感》.docx
《崔万志演讲观后感》.docx
-
《赤壁赋》理解性默写.docx
-
《匆匆》读书笔记15篇.docx
-
《公共政策概论》简答题题库.docx
-
《建设行政执法制度》.docx
-
《平凡的世界》读后感10篇.docx
-
《AUTO CAD》课程标准 2.docx
-
《搭石》课堂教学实录与评析2篇.docx
-
《广东省GSP认证现场检查项目》粤食药监.docx
-
《触摸春天》教案集合9篇.docx
-
《教育评价学》练习题库及答案.docx
-
《公差配合与测量》教案.docx
-
《软件工程》单项选择题答案.docx
-
《网页设计与制作Dreamweaver》试题附答案.docx
-
《易经》与中医学的关系.docx
-
①临床科室医疗质量管理记录册模板.docx
-
###经济开发区企业知识产权情况调研报告.docx
-
《别踩白块度典范版》设计计划文档.docx
-
《村居》教案模板合集七篇.docx
-
《高老头》读后感15篇.docx
-
《故乡》课堂教学实录.docx
-
《鉴定要素细目表》知识.docx
-
《脊椎病因治疗学》word版.docx
-
《马克思主义基本原理概论》考试真题及答案.docx
-
《人性论》读后感人性论读后感3000字.docx
-
《淘气包马小跳》读后感10篇.docx
-
《网页设计与制作》课程标准.docx
-
《小学音乐识谱教学有效性策略的研究》课题研究的中期报告.docx
-
《助产学》考试试题及答案01.docx
-
3分钟熟记精深中医针灸顺口溜附穴位图.docx
-
11大税种税法记忆口诀和计算方法.docx
-
《百家讲坛》观后感20篇.docx
-
中证大厦工程做法地面0620.docx
-
河南省南阳市秋期九年级期终质量评估.docx
-
旅行社经营管理主观试题.docx
-
泰康银保基本法.docx
-
淘宝阿里巴巴的网络广告营销策略应用研究.docx
-
中学德育工作月总结.docx
-
庐山实习报告.docx
-
县委班子述职报告.docx
-
路基土石方开挖施工专项方案.docx
-
基于51单片机电子密码锁设计汇总.docx
-
论复杂构造处理方法的研究.docx
-
项目部年终总结.docx
-
医院智慧管理分级评估具体要求.docx
-
届四川省米易中学高三下学期第一次段考物理试题及答案.docx
-
项目开发计划第一组.docx
-
专升本英语模拟试题十.docx
-
中班期末汇报发言稿.docx
-
银行零售信贷业务贷后管理办法.docx
-
消防动火作业管理制度.docx
