 基于STC89C51单片机的智能超声波避障小车讲解.docx
基于STC89C51单片机的智能超声波避障小车讲解.docx
- 文档编号:26819288
- 上传时间:2023-06-23
- 格式:DOCX
- 页数:20
- 大小:309.68KB
基于STC89C51单片机的智能超声波避障小车讲解.docx
《基于STC89C51单片机的智能超声波避障小车讲解.docx》由会员分享,可在线阅读,更多相关《基于STC89C51单片机的智能超声波避障小车讲解.docx(20页珍藏版)》请在冰豆网上搜索。
基于STC89C51单片机的智能超声波避障小车讲解
基于STC89C52单片机的智能超声波避障小车
参赛人员:
周志强王俊朱纪伟聂孟杰
班级:
2012级自动化3班
日期:
2015年3月
、方案概述
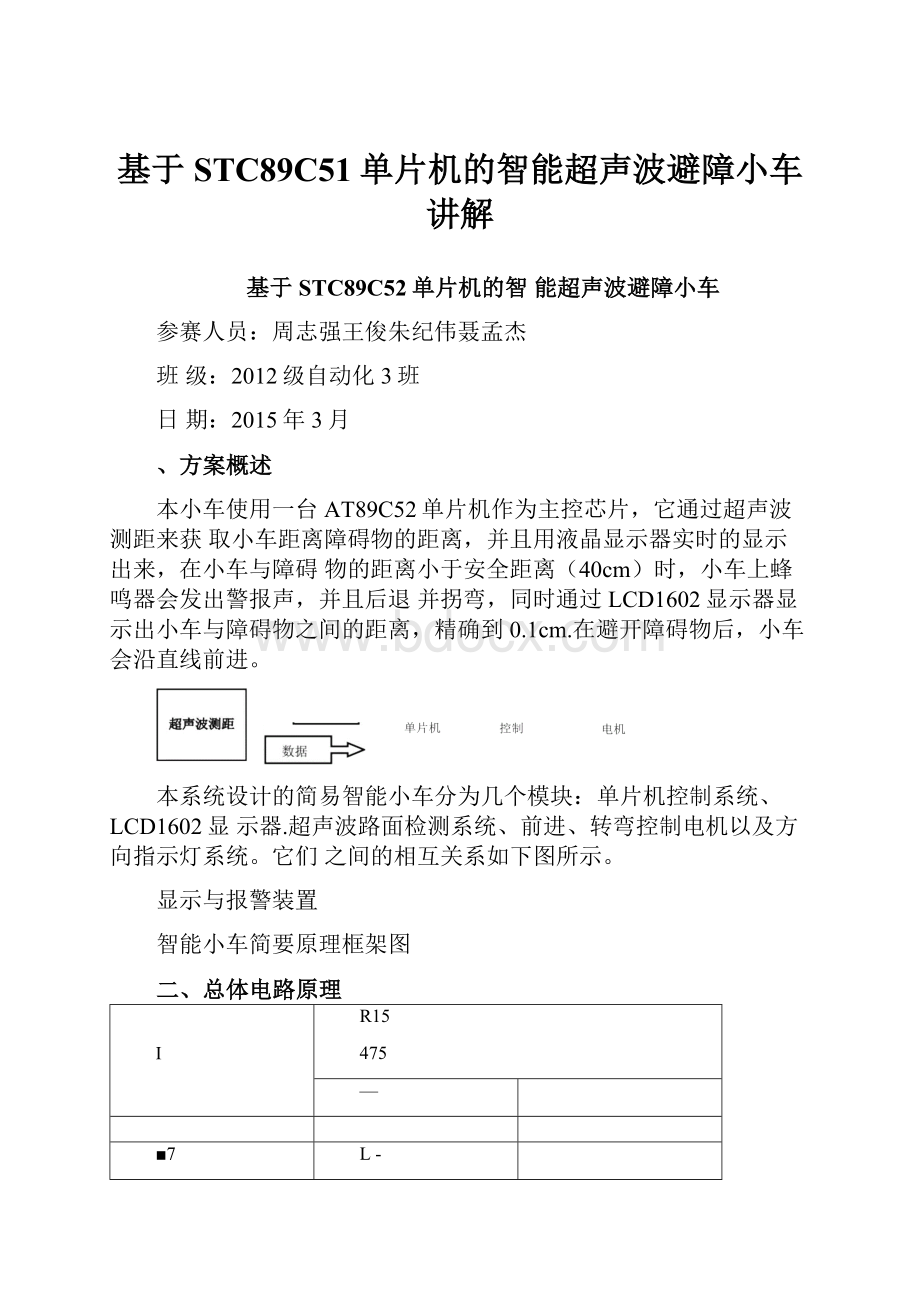
本小车使用一台AT89C52单片机作为主控芯片,它通过超声波测距来获取小车距离障碍物的距离,并且用液晶显示器实时的显示出来,在小车与障碍物的距离小于安全距离(40cm)时,小车上蜂鸣器会发出警报声,并且后退并拐弯,同时通过LCD1602显示器显示出小车与障碍物之间的距离,精确到0.1cm.在避开障碍物后,小车会沿直线前进。
本系统设计的简易智能小车分为几个模块:
单片机控制系统、LCD1602显示器.超声波路面检测系统、前进、转弯控制电机以及方向指示灯系统。
它们之间的相互关系如下图所示。
显示与报警装置
智能小车简要原理框架图
二、总体电路原理
I
R15
475
—
■7
L-
VCC
VCC
W3K
W21031:
VCC
十
7
£
P3.4
1,
XIN3了
OV33
VCC4
0V45
oT~INIIN2
VCC:
CM
INS
IN7
10SK
XIN46
P3.57
IN4
02
LSG24
W1
1031:
11GNDioo\n
14P>3
13XDC
12CAT!
VCC
INSOS
VCC
传感器模块
电源指示
Fl
L
VCC
12
34
56
78
GND
VCC
GND
¥CC
GND
VCC
GND
J17
电規开尺
KS1
C2
220uF
1^—\\~|hGND
Cl|+1i
A70iiF
GND
gS©
电源供电系统
P32
1K
1K
R12
P33L1
1K
VCC
R1J4=1K
P34I5K
L4
传感器指示灯
超声波模块接口
mJLC
35
0TL-4
3
OTU
6
PL
5
pl.
R1
7pl
14
10
vcczz需总
Ml
1K
0TU1
5
0TU2
GND«||
4
iT
6
Pl.3
7
7.2V
8
册0UT1GNDGND0UT2Evcc
3D
9
L2
电机驱动模块
Tv
—5%
R9
、:
.
R310K.
Th
R>w肥6VTO
h>5
咲
WRST
srcii
u
lT
l2U
10
丄
qg
12;KRdICk
|R6
75K
RHIK
X»Nl
fl®
R中2侬
lOnF
C9
T宏F 2K 4 '-*'1VT < 6 HI2 7SK w 22 2OLT InF PSP n loa. i1 <3 iuvn II K) 12 15 nxra IOL7 4OLT nv -IV vcc 2、 4fV- GN> 3Z 3OLT R13 IUK 14 : 3 CI+ VCV CI- \S* C2* vs« C2- TlCtrr 71TS 12N T2 RIOJT Rir* R2V1-T R2N CiM) 10Un R19 CH 发ih : 2\T hi-r1j 10 160 S6K 士接收 超声波模块 三、主要模块基本原理 (1)超声波模块 」U 10uS的TTL 发信号 i■坏发岀8个40KHZ脉冲 □ 值号 楔块内郎发出信号 回QR电平無出与怯测距SB成比例 超声波时序图 以上时序图表明你只需要提供一个10uS以上脉冲触发信号,该模块内部将发出8个40kHz周期电平并检测回波。 一旦检测到回波信号则输出回响信号。 回响信号的脉冲宽度与所测的距离成正比。 由此通过发射信号到收到的回响信号时间间隔可以计算得到距离。 公式: 距离二高电平时间*声速(340M/S)/2。 (2)液晶显示模块 LCD1602 如上图所示,整个液晶屏采用标准的16脚接口,其中GND为电源地,VCC接5V正电源,VEE为液晶显示屏对比度调整端,通过一个可调电阻接地,可调电阻调到最大时对比度最弱,可调电阻调到零时对比度最高。 RS为寄存器选择端,高电平时选择数据寄存器、低电平时选择指令寄存器。 RW为读写信号线,高电平时进行读操作,低电平时进行写操作。 当RS和RW共同为低电平时可以写入指令或者显示地址,当RS为低电平RW为高电平时可以读忙信号,当RS为高电平RW为低电平时可以写入数据。 E端为使能端,当E端由低电平跳变成高电平时,液晶屏执行命令。 DBO―DB7为8位双向数据线。 四、流程图及源代码 主函数流程图 源程序 #include #include include,,LCD1602display.hn #deflneTXP2_l #defineRXP2_0 sbitDU=P2A6; sbitWE=P2A7; #deflneFonvard_L_DATA180//当前进不能走直线的时候,请调节这两个参数,理想的时候是100,100,最大256,最小0。 0的时候最慢,256的时候最快 #defineFonvard_R_DATA180〃例如小车前进的时候有点向左拐,说明右边马达转速过快,那可以取一个值大一点,另外一个值小一点,例如200190 〃直流电机因为制造上的误差,同一个脉宽下也不一定速度一致的,需要自己手动调节 //sbitP4_0=0xc0;//P4口地址 /*****按照原图接线定义******/ sbitL293D_IN1=P1A2; sbitL293D_IN2=P1A3; sbitL293D_IN3=P1A6; sbitL293D_IN4=P1A7; sbitL293D_EN1=P1A4; sbitL293D_EN2=P1人5; sbitBUZZ=P2A3;〃蜂鸣器 voidcmg88()//关数码管,点阵函数 { DU=1; P0=0X00; DU=0; } voidDelay400Ms(void);//延时400毫秒函数 unsignedchaicodeRange[]='-=RangeFindei==u;//LCD1602显示格式 unsignedchaicodeASCH[13]=“0123456789.-M”; unsignedchaicodetable[]=,'Distance: 000.0cm,'; unsignedchaicodetablel[]="! ! ! Outofrange"; unsignedchaidisbuff[4]={0,0,0,0};//用于分别存放距离的值0.1mm、mm、cm和m的值 voidCount(void);//距离计算函数 unsignedmttime=0;//用于存放定时器时间值 unsignedlongS=0;//用于存放距离的值 bitflag=0;〃量程溢出标志位 bittuin_nght_flag; 〃—================================ voidFonvard(unsignedchaiSpeed_Right,unsignedcharSpeed_Left)//前进 { L293D_IN1=O; L293D_IN2=1; L293D_IN3=1; L293D_IN4=0; } voidStop(void)〃杀! |车 L293D_IN1=O; L293D_IN2=0; L293D_IN3=0; L293D_IN4=0; }_ voidTurn_Right(unsignedcharSpeed_Right,unsignedchaiSpeed_Left)//后退左转 { L293D_IN1=1; L293D_IN2=0; L293D_IN3=1; L293D_IN4=0; Delay(lOO); L293D_IN1=1; L293D_IN2=0; L293D_IN3=1; L293D_IN4=0; } voidConut(void) r tmie=THl*256+TLl; TH1=O; TL1=O; 〃此时time的时间单位决定于晶振的速度,外接晶振为11.0592MHZ时, //time的值为0.54us*time,单位为微秒 〃那么lus声波能走多远的距离呢? ls=1000ms=1000000i】s //340/1000000=0.00034米 //0.00034米/1000=0.34毫米也就是lus能走0.34毫米 〃但是,我们现在计算的是从超声波发射到反射接收的双路程,〃所以我们将计算的结果除以2才是实际的路程 S=tune*2y/先算出一共的时间是多少微秒。 S=S*0.17;〃此时计算到的结果为毫米,并且是精确到毫米的后两位了,有两个小数点 if(S<=300)// if(tuni_nght_flag! =1) { StopO; Delaylms(5);//发现小车自动复位的时候,可以稍微延长一点这个延时,减少电机反向电压对电路板的冲击。 } tuni_nght_flag=1; P2_3=0; Delaylms(50); P2_3=l; Tuin_Right(120,120);〃小于设定距离时电机后退转弯 } else { nnn_nght_flag=O; Fonvaid(Fonvard_R_DATA,Fowaid_L_DATA);〃前进(大于 20-30CM前进) } //====================if((S>=5OOO)||flag==l)//超出测量范围 { flag=0; DisplayListCliar(O,1,tablet); } else { disbuff[0]=S%10; disbuff[l]=S/10%10; disbuff[2]=S/100%10; disbuff[3]=S/lOOO; DisplayListCliar(O,1,table); DisplayOneChar(9,1,ASCII[disbuff[3]]); DisplayOneChar(10,1,ASCII[disbuff[2]]); DisplayOneChar(l1,1,ASCII[disbuff[l]]); DisplavOneChar(12,1,ASCII[10]); DisplayOneChar(13,1,ASCII[disbuff[O]]); } } *******************************************************/ voidzdOQlnteriupt3//TO中断用來计数器溢出,超过测距范围 flag=l; RX=O; } //中断溢出标志 /********超声波高电平脉冲宽度计算程序***************/ voidTunei_Count(void) TR1=1; while(RX); 〃开启计数 〃当RX为1计数并等待 TR1=O; ConutQ; 〃关闭计数 〃计算 } ****************************************************** voidStailModuleQ〃启动模块 { TX=1;〃启动一次模块 Delay10us (2); TX=0; } y*******************************************************voidmam(void) { unsignedchaii; unsignedinta; cmg88()^/关数码管 Delaylms(400);〃启动等待,等LCM讲入工作状态LCMIiiitO;//LCM初始化 Delaylms(5);〃延时片刻 DisplavListChar(O,0,Range); DisplayListChar(O,1,table); TMOD=TMOD|OxlO;//设TO为方式1,GATE=1; EA=1;〃开启总中断 TH1=O; TL1=O; ET1=1;〃允许TO中断 //==—======—=============//PWM_mi(); //==—======—============= tum_nght_flag=0; B: foi(i=0;i<50;i++)〃判断K3是否按下 { Delaylms(l);//lms内判断50次,如果其中有一次被判断到K3没按下,便重新检测 if(P3_6! =0)〃当K3按下时,启动小车 gotoB;〃跳转到标号B,重新检测 } //蜂鸣器响一声 BUZZ=0;〃50次检测K3确认是按下之后,蜂鸣器发出“滴”声响,然后启动小车。 Delaylms(50); BUZZ=1;//响50ms后关闭蜂鸣器 while(l) { RX=1; StartModuleQ;〃启动模块 for(a=951;a>0;a-) if(RX=l) { Timer_Count();〃超声波高电平脉冲宽度计算函数 } } } 结束语: 本系统有STC89C52单片机,超声波模块,LCD1602显示器,报警系统等组成。 STC89C52控制电机的转动和报警系统的动作。 智能小 LCD1602显示智能型小车到障碍物之间的距离便于人査看。 车能够实现自动避障,自动报警,实时监控障碍距离的功能


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 基于 STC89C51 单片机 智能 超声波 小车 讲解
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《C12343098汽轮机操作规程》要点.docx
《C12343098汽轮机操作规程》要点.docx
-
《钢丝绳芯输送带硫化接头标准》.docx
-
《建筑装饰CAD》课程标准.docx
-
《劳动合同书》范本下载.docx
-
《普通话实用训练教程》教案 1.docx
-
《上海星河湾土方道路景观铺装景观建筑景观小品绿化种植及配套水电安装工程施工组织设计》教学.docx
-
#2#014年护士执业资格考试考前押题卷实践能力.docx
-
《繁荣世界守护者》图文流程攻略.docx
-
《工业设计机械基础》复习题.docx
-
《机电一体化系统设计》思考题.docx
-
《Java项目实训》课程设计计算器要点.docx
-
《赤壁赋》必修一9.docx
-
《工商企业经营管理》重点复习题供参考.docx
-
《审计准则第1322号公允价值计量和披露的审计》指南全解.docx
-
《索溪峪的野》课堂教学实录文档资料.docx
-
《餐饮服务与管理》教学计划复习进程.docx
-
《花卉栽培》试题库完整.docx
-
《经络学B》答案.docx
-
《身边地化学物质》知识点汇总情况.docx
-
《5鲁滨逊漂流记》教学设计和教案附同步练习.docx
-
《送别组诗》教案.docx
-
《Visual Basic程序设计基础》课后习题参考答案.docx
-
《创新与企业家精神》.docx
-
《詹天佑》教学反思说课稿教学设计教材.docx
-
《风力发电机组设计方案与制造》课程设计方案任务书.docx
-
《最后的姿势》教学设计.docx
-
1楼无机保温砂浆外墙外保温涂料饰面1分解.docx
-
5篇学校工作开展情况述职报告.docx
-
6届高三上学期一轮纠错生物试题附答案.docx
-
《图书馆学概论》知识点.docx
-
《语言学导论》期末复习及练习.docx
-
02煤矿电能质量治理技术的研究与应用计划任务书.docx
-
教师任职工作总结及工作思路Word格式文档下载.docx
-
陈陆先进事迹作文素材Word格式.docx
-
人教版数学二年级上册全套教案教学设计备课Word格式.docx
-
华融住宅小区冬季施工方案文档格式.docx
-
施工现场监理工作管理制度文档格式.docx
-
隧道洞顶及周边水环境监测方案文档格式.docx
-
精编完整版青关2号桥改造工程项目施工设计Word下载.docx
-
五年级数学上册简易方程综合练习题186Word格式.docx
-
煤矿瓦斯二氧化碳有害气体检查制度及相关规定Word下载.docx
-
《大海啊故乡》教学反思docWord文档格式.docx
-
母乳喂养Word文件下载.docx
-
江苏省分行票据池业务管理办法文档格式.docx
-
最新14浦东新区初三英语一模卷资料Word文档格式.docx
-
特大桥悬浇箱梁施工组织设计Word格式文档下载.docx
-
作文修改案例五年级作文《快乐》修改及点评Word格式文档下载.docx
-
三年级阅读练习题Word文件下载.docx
-
教学成果奖表彰大会发言材料以教学沃土育科研之花Word文件下载.docx
-
《歌唱的方法》声乐练声阶段推荐民族美声类练习曲目Word格式文档下载.docx
-
生产主管上半年工作总结文档格式.docx
