 多机通信.docx
多机通信.docx
- 文档编号:26706490
- 上传时间:2023-06-21
- 格式:DOCX
- 页数:17
- 大小:43.22KB
多机通信.docx
《多机通信.docx》由会员分享,可在线阅读,更多相关《多机通信.docx(17页珍藏版)》请在冰豆网上搜索。
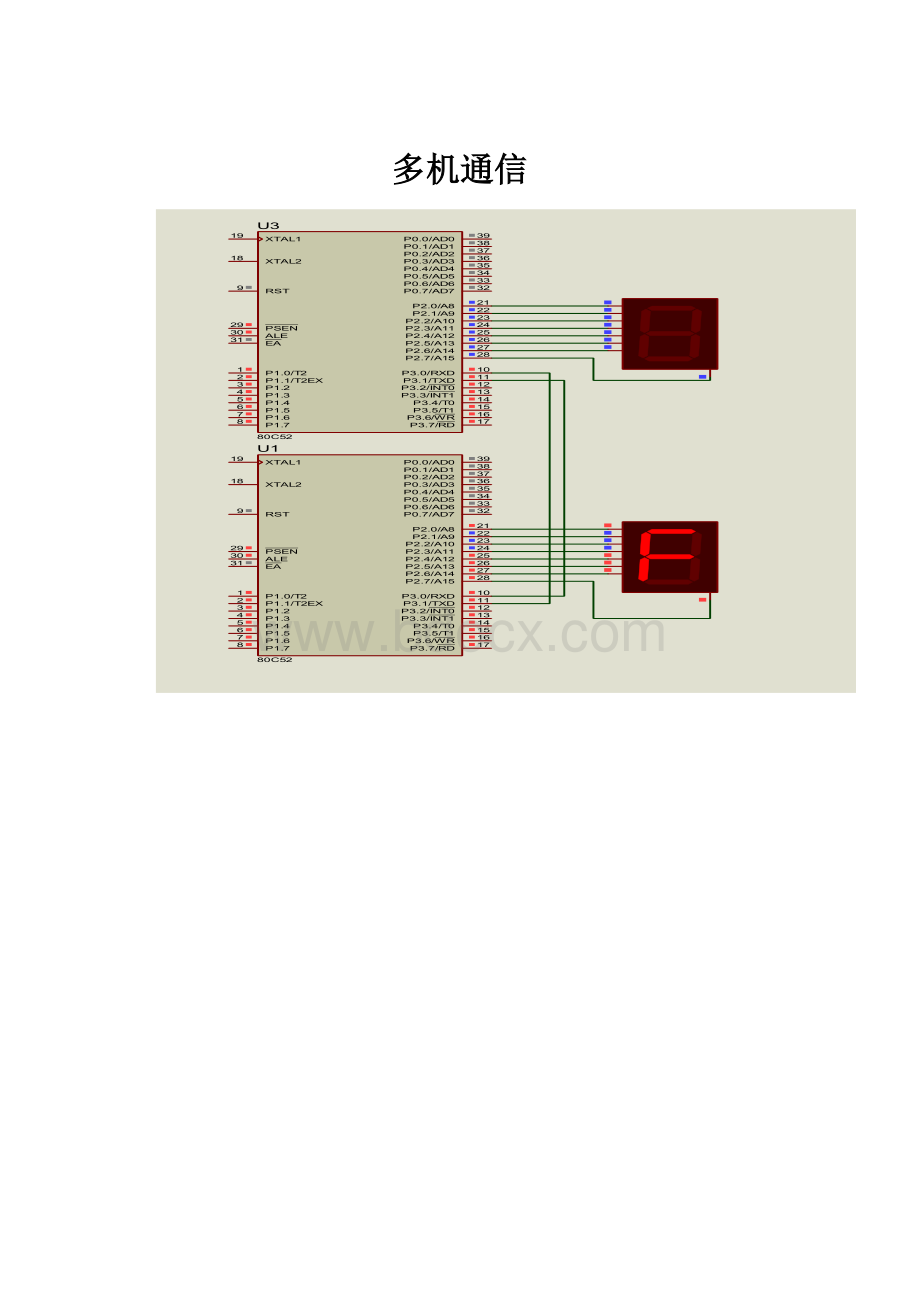
多机通信
---1---串行通信_轮流计秒主机
#include
#include
#include
unsignedcharcodeledk[17]={0x3f,0x06,0x5b,0x4f,0x66,0x6D,0x7d,0x07,0x7f,0x6f,0x77,
0x7c,0x39,0x5e,0x79,0x73,0x00};
unsignedcharbuf[10],sdata[2]={0x0a,8},
send_flag,sec,t0_count,run_flag,time_1=5;
voiddelay(unsignedintn)
{unsignedinti;
for(i=0;i //================= voidreceive() {do{}while(! RI);RI=0;buf[0]=SBUF;} voidsend() {unsignedchari; for(i=0;i<2;i++){SBUF=sdata[i];while(! TI);TI=0;} } //================= voidt0()interrupt1 {TH0=0x3c;TL0=0xb0; t0_count++; if(t0_count==20){sec++;t0_count=0;}} //================== voidmain(void) {TMOD=0x21;TH0=0x3c;TL0=0xb0;TH1=0xcc;TL1=0xcc;TR1=1;EA=1;ET0=1; SCON=0x50; do{SBUF=0x0a;while(! TI);TI=0; do{}while(! RI);RI=0;buf[0]=SBUF;}while(buf[0]! =0x0b); P2=ledk[buf[0]];delay(50000); run_flag=0;send_flag=1; while (1) {if(buf[0]==0x0b){buf[0]=0;run_flag=1;} if(sec==time_1)send_flag=1; if(send_flag==1){send();run_flag=0;send_flag=0;} if(run_flag==0){TR0=0;P2=ledk[15];sec=0;t0_count=0;receive();} if(run_flag==1){TR0=1;P2=ledk[sec];} delay(60); } } ---2---串行通信_轮流计秒从机 #include #include #include unsignedcharcodeledk[17]={0x3f,0x06,0x5b,0x4f,0x66,0x6D,0x7d,0x07,0x7f,0x6f,0x77, 0x7c,0x39,0x5e,0x79,0x73,0x00}; unsignedcharbuf[10],sdata=0x0b,sec,t0_count,time_2,run_flag; //-------- voiddelay(unsignedintn) {unsignedinti; for(i=0;i //================ voidreceive() {unsignedchari; for(i=0;i<2;i++) {do{}while(! RI);RI=0;buf[i]=SBUF;}} voidsend() {SBUF=sdata;while(! TI);TI=0;} //================= voidt0()interrupt1 {TH0=0x3c;TL0=0xb0; t0_count++; if(t0_count==20){sec++;t0_count=0;}} //================== voidmain(void) {TMOD=0x21;TH0=0x3c;TL0=0xb0;EA=1;ET0=1; TH1=0xcc;TL1=0xcc;TR1=1; SCON=0x50; do{while(! RI);RI=0;buf[0]=SBUF;}while(buf[0]! =0x0a); SBUF=0x0b;while(! TI);TI=0; P2=ledk[buf[0]];delay(50000); buf[0]=0;run_flag=0; while (1){if(buf[0]==0x0a){buf[0]=0;time_2=buf[1];run_flag=1;} if(run_flag==1&&sec==time_2){send();run_flag=0;} if(run_flag==0){TR0=0;P2=ledk[15];sec=0;t0_count=0;receive();} if(run_flag==1){TR0=1;P2=ledk[sec];} delay(60);} } ---3---串行通信_中断主机 #include #include unsignedcharcodeledk[17]={0x3f,0x06,0x5b,0x4f,0x66,0x6D,0x7d,0x07,0x7f,0x6f, 0x77,0x7c,0x39,0x5e,0x79,0x71,0x00}; unsignedcharbuf[10],sdata[10]={9,8,7,6,5,4,3,2,1,0}; voiddelay(unsignedintn) {unsignedinti; for(i=0;i //================= voides()interrupt4 {unsignedchari; for(i=0;i<6;i++) {do{}while(! RI);RI=0;buf[i]=SBUF;}ES=0;} voidsend() {unsignedchari; for(i=0;i<10;i++) {SBUF=sdata[i];while(! TI);TI=0;} } //================== voidmain(void) {unsignedchari; TMOD=0x20;TH1=0xcc;TL1=0xcc;TR1=1;ES=0;EA=1; SCON=0x50; while (1) {delay(50000);delay(50000);delay(50000); send(); //ES=1; //for(i=0;i<6;i++){P2=ledk[buf[i]];delay(50000);} //P2=ledk[16]; delay(50000);delay(50000);delay(50000); } } ---4---串行通信_中断从机 #include #include unsignedcharcodeledk[17]={0x3f,0x06,0x5b,0x4f,0x66,0x6D,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71,0x00}; unsignedcharbuf[10],sdata[6]={10,11,12,13,14,15}; voiddelay(unsignedintn) {unsignedinti; for(i=0;i //================ voides()interrupt4 {unsignedchari; for(i=0;i<10;i++) {do{}while(! RI);RI=0;buf[i]=SBUF;}ES=0;} voidsend() {unsignedchari; for(i=0;i<6;i++){SBUF=sdata[i];while(! TI);TI=0;}} voidmain(void) {unsignedchari; TMOD=0x20;TH1=0xcc;TL1=0xcc;TR1=1;SCON=0x50;ES=0;EA=1; while (1) {ES=1; //send(); for(i=0;i<10;i++){P2=ledk[buf[i]];delay(50000);} P2=ledk[16]; delay(50000);}} ---5---串行相互通信主机 #include #include unsignedcharcodeledk[17]={0x3f,0x06,0x5b,0x4f,0x66,0x6D,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71,0x00}; unsignedcharbuf[10],sdata[10]={9,8,7,6,5,4,3,2,1,0}; voiddelay(unsignedintn) {unsignedinti; for(i=0;i //================= voidreceive() {unsignedchari; for(i=0;i<6;i++) {do{}while(! RI);RI=0;buf[i]=SBUF;}} voidsend() {unsignedchari; for(i=0;i<10;i++){SBUF=sdata[i];while(! TI);TI=0;}} //ES=1;} //================== voidmain(void) {unsignedchari; TMOD=0x20;TH1=0xcc;TL1=0xcc;TR1=1; SCON=0x50; while (1) {do{SBUF=0x0a;while(! TI);TI=0; do{}while(! RI);RI=0;buf[0]=SBUF;}while(buf[0]! =0x0b); P2=ledk[buf[0]]; delay(50000); P2=ledk[16]; delay(50000);delay(50000); send(); receive(); for(i=0;i<6;i++){P2=ledk[buf[i]];delay(50000);} P2=ledk[16]; delay(50000);delay(50000);delay(50000);}} ---6---串行相互通信从机 //computer22.c #include #include #include unsignedcharcodeledk[17]={0x3f,0x06,0x5b,0x4f,0x66,0x6D,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71,0x00}; unsignedcharbuf[10],sdata[6]={10,11,12,13,14,15}; voiddelay(unsignedintn) {unsignedinti; for(i=0;i //================ voidreceive() {unsignedchari; for(i=0;i<10;i++) {do{}while(! RI);RI=0;buf[i]=SBUF;}} voidsend() {unsignedchari; for(i=0;i<6;i++){SBUF=sdata[i];while(! TI);TI=0;}} voidmain(void) {unsignedchari; TMOD=0x20;TH1=0xcc;TL1=0xcc;TR1=1;SCON=0x50; while (1) {do{}while(! RI);RI=0;buf[0]=SBUF; if(buf[0]==0x0a){P2=ledk[buf[0]];delay(50000);P2=ledk[16]; SBUF=0x0b;while(! TI);TI=0;} receive(); for(i=0;i<10;i++){P2=ledk[buf[i]];delay(50000);} P2=ledk[16]; delay(50000);send();}} ---7---主机校验和 #include #include unsignedcharbuf[15],flag,sdata[20],a[10]={9,8,7,6,5,4,3,2,1,0}; unsignedcharcodeledk[17]={0x3f,0x06,0x5b,0x4f,0x66,0x6D,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71,0x00}; voiddelay(unsignedintn) {unsignedinti; for(i=0;i voidsend() {unsignedchari,no=9,sum=0; buf[0]=no; for(i=0;i<=no;i++){buf[i+1]=a[i];sum=sum+a[i];} buf[no+2]=sum; for(i=0;i<=no+2;i++){SBUF=buf[i];while(! TI);TI=0;}} voidmain(void) {flag=0;TMOD=0x20;TH1=0xf3;TL1=0xf3;TR1=1;SCON=0x50;//TH1=0xcc;TL1=0xcc; while (1) {do{send(); do{}while(! RI);RI=0;}while(SBUF! =0x0d); P2=ledk[SBUF];delay(50000); P2=ledk[16];delay(65000);delay(65000);delay(65000); delay(65000);delay(65000);delay(65000); delay(65000);delay(65000);delay(65000);}} ---8---从机校验和 #include #include sbitSDATA=P1^0;//串行数据输入 sbitSCLK=P1^1;//移位时钟脉冲 sbitRCK=P1^2;//输出锁存器控制脉冲 unsignedcharcodeledk[17]={0x3f,0x06,0x5b,0x4f,0x66,0x6D,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71,0x00}; unsignedcharsum=0,total,no,buf[10],flag;//sdata[6]={10,11,12,13,14,15}; voiddelay(unsignedintn) {unsignedinti; for(i=0;i //================ voidmain(void) {unsignedchari,mask=0xef,mask1=0xdf; TMOD=0x20;TH1=0xf3;TL1=0xf3;TR1=1; SCON=0x50;//TH1=0xcc;TL1=0xcc; while (1) {aa: sum=0; do{}while(! RI);RI=0;no=SBUF; for(i=0;i<=no;i++) {do{}while(! RI);RI=0;buf[i]=SBUF;sum=sum+SBUF;} do{}while(! RI);RI=0;total=SBUF; if(total! =sum){SBUF=0x0c;while(! TI);TI=0;gotoaa;}//校验和不等 else{SBUF=0x0d;while(! TI);TI=0;//校验和相等 for(i=0;i<=no;i++){P2=ledk[buf[i]]; delay(50000);}//显示接收数据 P2=ledk[16]; delay(50000);}}} ---9---多机通信1_主机 #include #include unsignedcharcodeledk[17]={0x3f,0x06,0x5b,0x4f,0x66,0x6D,0x7d,0x07,0x7f, 0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71,0x00}; unsignedcharbuf[15],a[10]={9,8,7,6,5,4,3,2,1,0},b[6]={10,11,12,13,14,15}; voiddelay(unsignedintn) {unsignedinti; for(i=0;i //================ voidsend() {unsignedchari,no=9,sum=0; buf[0]=no; for(i=0;i<=no;i++){buf[i+1]=a[i];sum=sum+a[i];} buf[no+2]=sum; for(i=0;i<=no+2;i++){SBUF=buf[i];while(! TI);TI=0;}} voidsend1() {unsignedchari,no=5,sum=0; buf[0]=no; for(i=0;i<=no;i++){buf[i+1]=b[i];sum=sum+b[i];} buf[no+2]=sum; for(i=0;i<=no+2;i++){SBUF=buf[i];while(! TI);TI=0;}} voidreceive() {unsignedchari; for(i=0;i<4;i++) {do{}while(! RI);RI=0;buf[i]=SBUF;}} voidmain(void) {unsignedchari; TMOD=0x20;TH1=0xf3;TL1=0xf3;TR1=1; SCON=0xd0;PCON=0x00; while (1) {do{TB8=1;SBUF=0x01;while(! TI);TI=0; do{}while(! RI);RI=0;} while(SBUF! =0x01); P2=ledk[SBUF];delay(50000);P2=ledk[16]; TB8=0; send(); receive(); for(i=0;i<4;i++){P2=ledk[buf[i]];delay(50000);} P2=ledk[16]; delay(65000);delay(65000);delay(65000); do{TB8=1;SBUF=0x02;while(! TI);TI=0; do{}while(! RI);RI=0;} while(SBUF! =0x02); P2=ledk[SBUF];delay(50000);P2=ledk[16]; TB8=0; send1(); receive(); for(i=0;i<4;i++){P2=ledk[buf[i]];delay(50000);} P2=ledk[16]; delay(65000);delay(65000);delay(65000); delay(65000);delay(65000);delay(65000);}} ---10---多机通信1_从机1 #include #include #include unsignedcharcodeledk[17]={0x3f,0x06,0x5b,0x4f,0x66,0x6D,0x7d,0x07,0x7f,0x6f,0x77, 0x7c,0x39,0x5e,0x79,0x71,0x00}; unsignedcharsum=0,total,no,buf[10];//sdata[6]={10,11,12,13,14,15}; voiddelay(unsignedintn) {unsignedinti; for(i=0;i voidsend() {unsignedchari; for(i=0;i<4;i++){SBUF=i;while(! TI);TI=0;}} //================ voidmain(void) {unsignedchari; TMOD=0x20;TH1=0xf3;TL1=0xf3;TR1=1; SCON=0xd0;PCON=0x00; while (1) {do{SM2=1; do{}while(! RI);RI=0;}while(SBUF! =0x01); TI=0;TB8=0; SBUF=0x01;while(! TI);TI=0; SM2=0; do{}while(! RI);RI=0;no=SBUF; for(i=0;i<=no;i++) {do{}while(! RI);RI=0;buf[i]=SBUF;sum=sum+SBUF;} do{}while(! RI);RI=0;total=SBUF; for(i=0;i<=no;i++){P2=ledk[buf[i]];delay(50000);}//显示接收数据 P2=ledk[16]; send(); delay(65000);delay(65000);delay(65000); //shift(ledk[sum/10]|0x80);delay(50000);//显示校验和 //shift(ledk[sum%10]|0x80);delay(50000);}} ---11---多机通信1_从机2 #include #include unsignedcharcodeledk[17]={0x3f,0x06,0x5b,0x4f,0x66,0x6D,0x7d,0x07,0x7f,0x6f,0x


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 通信
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《C12343098汽轮机操作规程》要点.docx
《C12343098汽轮机操作规程》要点.docx
-
《钢丝绳芯输送带硫化接头标准》.docx
-
《建筑装饰CAD》课程标准.docx
-
《劳动合同书》范本下载.docx
-
《普通话实用训练教程》教案 1.docx
-
《上海星河湾土方道路景观铺装景观建筑景观小品绿化种植及配套水电安装工程施工组织设计》教学.docx
-
#2#014年护士执业资格考试考前押题卷实践能力.docx
-
《繁荣世界守护者》图文流程攻略.docx
-
《工业设计机械基础》复习题.docx
-
《机电一体化系统设计》思考题.docx
-
《Java项目实训》课程设计计算器要点.docx
-
《赤壁赋》必修一9.docx
-
《工商企业经营管理》重点复习题供参考.docx
-
《审计准则第1322号公允价值计量和披露的审计》指南全解.docx
-
《索溪峪的野》课堂教学实录文档资料.docx
-
《餐饮服务与管理》教学计划复习进程.docx
-
《花卉栽培》试题库完整.docx
-
《经络学B》答案.docx
-
《身边地化学物质》知识点汇总情况.docx
-
《5鲁滨逊漂流记》教学设计和教案附同步练习.docx
-
《送别组诗》教案.docx
-
《Visual Basic程序设计基础》课后习题参考答案.docx
-
《创新与企业家精神》.docx
-
《詹天佑》教学反思说课稿教学设计教材.docx
-
《风力发电机组设计方案与制造》课程设计方案任务书.docx
-
《最后的姿势》教学设计.docx
-
1楼无机保温砂浆外墙外保温涂料饰面1分解.docx
-
5篇学校工作开展情况述职报告.docx
-
6届高三上学期一轮纠错生物试题附答案.docx
-
《图书馆学概论》知识点.docx
-
《语言学导论》期末复习及练习.docx
-
02煤矿电能质量治理技术的研究与应用计划任务书.docx
-
软件技术毕业设计论文网吧计费管理系统Word文件下载.docx
-
江苏自考机械设计基础复习重点Word格式.docx
-
社区护理学一专升本自考真题及答案题库完整Word格式.docx
-
教师师德师风承诺书Word文档下载推荐.docx
-
三年级数学下册《面积和面积单位》优秀教案Word文档下载推荐.docx
-
教师职业道德考核个人总结Word格式.docx
-
神经病学复习重点文档格式.docx
-
结构化学习题Word下载.docx
-
厦门市建设工程鼓浪杯奖市优质工程评审暂行办法Word下载.docx
-
生活饮用水水质标准最新Word下载.docx
-
九年级九年级数学上第一章特殊的平行四边形专项测试题北师大版带答案文档格式.docx
-
上海版学年八年级下学期期中测试B卷Word下载.docx
-
酒店安防监控系统Word文件下载.docx
-
识别和确定顾客的要求和期望Word文件下载.docx
-
什么是微课Word下载.docx
-
决策练习题五Word下载.docx
-
深圳牛津八年级下册作文专项练习文档格式.docx
-
开学典礼发言稿Word文件下载.docx
-
加油站工作总结集锦5篇Word文件下载.docx
