 履带车辆设计计算说明.docx
履带车辆设计计算说明.docx
- 文档编号:26617916
- 上传时间:2023-06-20
- 格式:DOCX
- 页数:16
- 大小:29.45KB
履带车辆设计计算说明.docx
《履带车辆设计计算说明.docx》由会员分享,可在线阅读,更多相关《履带车辆设计计算说明.docx(16页珍藏版)》请在冰豆网上搜索。
履带车辆设计计算说明
履带车辆设计计算说明
Documentnumber:
PBGCG-0857-BTDO-0089-PTT1998
整车参数计算
根据《GB/T农业拖拉机试验规程第2部份:
整机参数测量》标准要求进行计算:
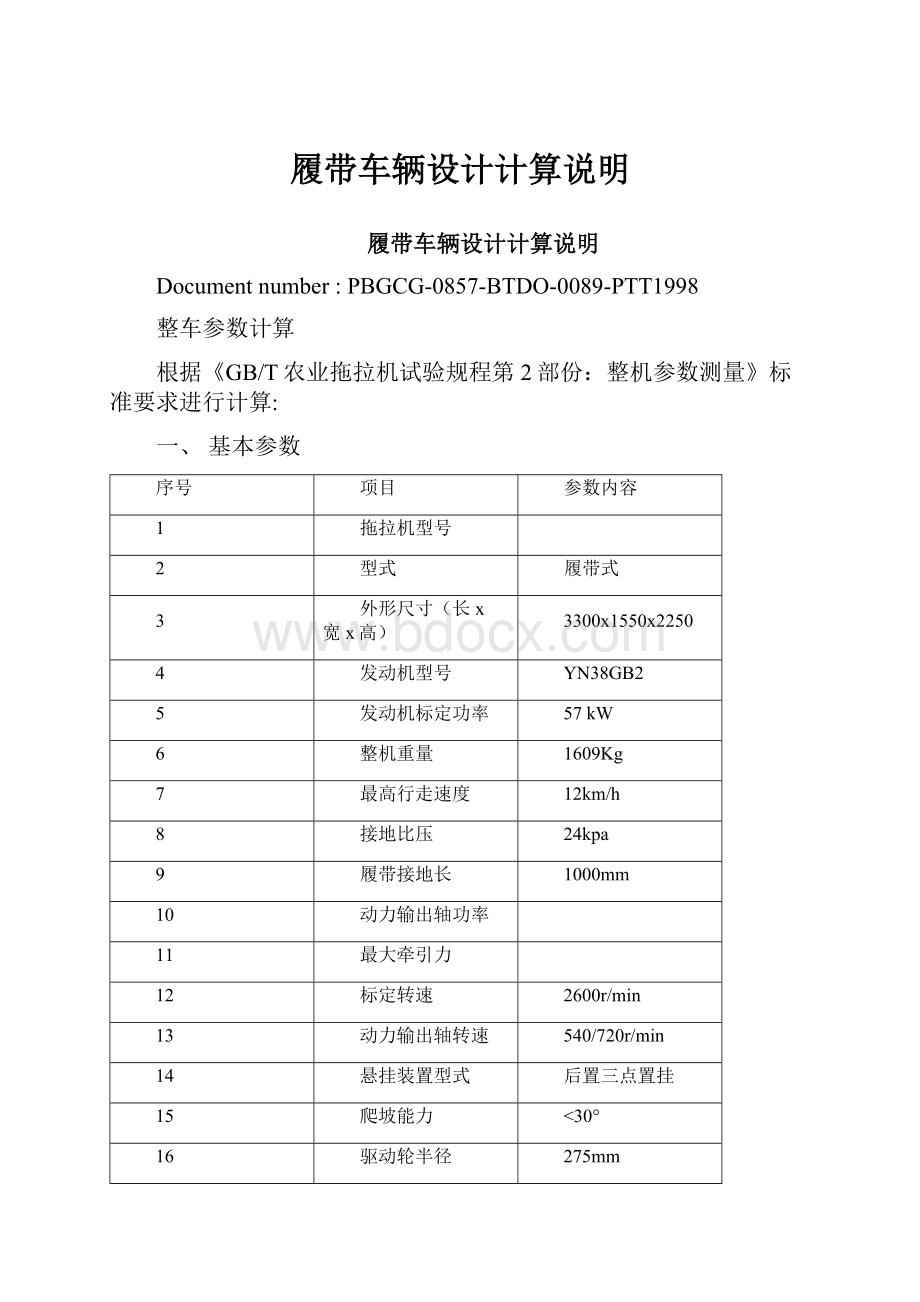
一、基本参数
序号
项目
参数内容
1
拖拉机型号
2
型式
履带式
3
外形尺寸(长x宽x高)
3300x1550x2250
4
发动机型号
YN38GB2
5
发动机标定功率
57kW
6
整机重量
1609Kg
7
最高行走速度
12km/h
8
接地比压
24kpa
9
履带接地长
1000mm
10
动力输出轴功率
11
最大牵引力
12
标定转速
2600r/min
13
动力输出轴转速
540/720r/min
14
悬挂装置型式
后置三点置挂
15
爬坡能力
<30°
16
驱动轮半径
275mm
17
底盘轨距
1050mm
8
履带圾大冋度
860mm
2.质量参数的计算
1、整备质量Mo为1825kg;
2、总质量M总
M总=MO+M1+M2=1825+300-75=2200kg
血载质疑:
300kgM2驾驶员质量:
75kg
3、使用质量:
H总二M0+M2=1825+75=1900kg
4、质心位置
根据《GB/T农业拖拉机试验规程第15部份:
质心》标准要求进行计算:
空载时:
质心至后支承点的距离A0二830mm
质心至前支承点的距离B二610mm
质心至地面的距离h0二450mm
满载时:
质心至后支承点的距离A0二605mm
质心至前支承点的距离B二812mm质心至地面的距离h0二546mm
5、稳左性计算
a、保证拖拉机爬坡时不纵向翻倾的条件是:
%>fi=(§为滑转率)
空载时:
830/450=>
满载时:
605/546二〉
满足条件。
b、保证拖拉机在无横向坡度转弯时,不横向翻倾的条件是:
/2/1>=0.7a—轨距,a二1200mmh—质心至地面距离mm
空载:
加〉
故拖拉机在空、满载运行中均能满足稳左性要求。
三、发动机匹配
根据《GB/T中小功率内燃机第1部份:
通用技术条件》标准要求进行计算:
XJ-782LT履带式拖拉机配套用昆明云内发动机,型号为:
YN38GB2型柴油机,标左功率为57kW/h,转速为2600r/min.
(1)最髙设讣车速鼻弐km/h,所需功率:
尸z•二丄(巴+几)kw
n
(2)根据柴油机全负荷速度特性,最大扭矩点的低速档行车速度V2=4km/ho选
用V2二4km/h,最大爬坡度为25%时,计算所需功率:
二丄(巴+p+/)kw
n
上述两式中:
P.——滚动阻力消耗的功率:
P.一一空气阻力消耗的功率:
尸:
一一坡度阻力消耗的功率;
n——传动效率系数,取n二;
/——滚动阻力系数,取£:
q——空气阻力系数,取q二;
A一一拖拉机前进方向迎风而积A二BXH(宽X髙)二X
K一一拖拉机取低档速度K=4km/h;
i一一最大爬坡坡度,i=25%;
G一一拖拉机总质量,G总二2200kg。
(注:
表示履拖在工作状态)
经讣算拖拉机组满载时以最高时速行驶所需功率耳”和低档速度爬25%的坡时,所需功率均小于YN38GB2柴油机的标定功率57kW,并有一泄功率储备,故能够满足设计要求。
五、履带式底盘的设计与确定
1、履带底盘的说明:
底盘是拖拉机的重要部件,它对整个装置起着支撑作用。
所以根据农用履带式拖拉机对整个装置进行较完整的配合与加工等一系列的设计。
履带行走装置有“四轮一带”(驱动轮,支重轮,导向轮,拖带轮或张紧轮,以及履带),张紧装置和行走机构组成。
机械行走时,驱动轮在履带紧边产生一个拉力,力图把履带从支重轮下拉出。
出于支重轮下的履带与地而有足够的附着力,阻止履带的拉出,迫使驱动轮卷绕履带向前滚动,导向轮把履带铺设到地面,从而使机体借支重轮沿履带轨道向前运行。
大功率轮式拖拉机机重一般在5500<8500kg,接地而积比履带拖拉机小,因此接地压力较大。
经数年耕作后,在土壤的耕层下面将生成硬底层,不利于上壤的蓄水保墻和作物的生长。
即使经过深度翻耙,依然会保持碎小的板结硬块,上壤的显微结构遭到了破坏。
附着性能差,滑转率髙。
橡胶履带拖拉机牵引力大,适合重负荷作业(如耕、耙等),接地比压小,对农田压实、破坏程度轻,特别适合在低、湿地作业,而且除田间作业外,还在农出基本建设和小型水利工程中用作推上机,综合利用程度较髙。
依据轮式与大功率履带机械的特点,以其以上所叙述的比较分析,综合考虑后得出采用:
三角形式的“四轮一带”橡胶履带行走装置。
履带整机参数初步确定以后,应进行计算该履带机械的基本性能是否满足预期要求,整机参数选择是否合理。
这里主要是关于牵引性能的汁算。
2、牵引功率计算:
根拯《GB/T农业拖拉机试验规程第9部份:
牵引功率试验》标准要求进行计算:
汁算工况:
il•算时所用的工况一般为:
在使用重量状态与水平区段的茬地上(对旱地是适耕适度的茬地,对水田是中等泥脚深度的茬地),带牵引负荷(牵引线与地而平行)全油门等速行驶。
(1)履带式传动的驱动力巧履带传动Pq=巳汁kgf式中:
卑一一发动机转矩kgf;
/一一各档总传动比;
n一一各档总传动效率;
r,驱动轮动力半径m;
n一一履带驱动段半径效率,计算时一般去取%二。
G=2Lg;空二;&二()厶。
式中:
G:
一一最大使用重量;
L——履带接地长度:
b——履带板宽度:
%—般为~kgf/血:
Prx一一额泄牵引力:
厶一一牵引力。
根据
(2)中的活动阻力经计算即可得〈)
经计算后得结果于.
(2)履带式传动的活动阻力匚
kgf
式中:
Gs——使用重M(kgf):
f一一履带式一般取。
经计算后得结果斥二
(3)行驶速度v
理论速度气=0.377
JV
实际速度尸匕(1-5)km/h
式中:
n一一发动机转速;
九一一驱动轮动力半径:
込一一驱动轮轮滑转率(履带式一般取)。
经计算后得结果产C6)km/h
(4)履带式传动的牵引效率q
式中:
n——各档的总传动效率;
q—滚动效率:
n—滑转效率:
q——履带驱动带效率(一般取)。
经
计算后得结果q=
(5)履带机械的附着力%(要求:
附着力应大于或等于履带行走机构的牵引力且大于等于各阻力之和。
)P吒吨屮
式中:
屮&——一般取:
G——取1900KG。
经计算后得结果Py二(符合要求)
3、转向最大驱动力矩的分析与计算:
根据《GB/T15833-1995林业轮式和履带式拖拉机试验方法》标准要求进行计算:
(1)履带转向时驱动力说明:
履带行走装置在转向时,需要切断一边履带的动力并对该履带进行制动,使其静止不
动,靠另一边履带的推动来进行转向,或者将两条履带同时一前一后运动,实现原地转向,但两种转向方式所需最大驱动力一样。
因此以机器单条履带制动左转为例,见图:
图5-2履带转左向示意图
左边的履带处于制动状态,右边履带的推动下,整台机器绕左边履带的中心C,点旋转,产生转向阻力矩血,右边履带的行走阻力Fr/2o一般情况,履带接地长度L和履带轨蹈B的比值L/BS。
同时,L/B值也直接影响转向阻力的大小,在不影响机器行走的稳泄性及接地比压的要求下,应尽量取小值,也就是尽量缩短履带的长度,可以降低行泄机构所需驱动力。
(2)转向驱动力矩的计算转向阻力矩是履带绕其本身转动中心0,(或0J作相对转动时,地而对履带产生的阻力矩,如图所示,0’、0:
分別为两条履带的瞬时转向中心。
为便于计算转向阻力矩理的数值,作如下两点假设:
(1)机体质量平均分配在两条履带上,且单位履带长度上的负荷为:
式中:
M-总质量(kg);
L-履带接地长度(m)。
经过计算:
q=—=-=593.75(^//«)
2L2x1.6
形成转向阻力矩起的反力都是横向力且是均匀分布的。
履带拖拉机牵引负荷在转向时存在横向分力,在横向分力的影响下,车辆的转向轴线将由原来通过履带接地几何中心移至0.0:
移动距离为%。
图5-3履带转向受力图
根据上述假设,转向时地而对履带支承段的反作用力的分布为矩形分布。
在履带支承而上任何一点到转动中心的距离为X.则微小单元长度为dx,分配在其上的车体重力为qdx,总转向阻力矩可按下式:
式中:
卜转向阻力系数。
it=__=0.45
0.85+0.15-
B
式中:
乩唤■•车辆作急转弯时转弯的转向阻力系数:
B—履带轨距。
)
(LL\
r
—+.V0『——.VO
;uqxcL+^uqxd.代入上式积分得并简化得:
Mu=—
..uGL
0.45x1900x1.6°一“
HJ:
M==
=一342Nj?
i
”4
4
(3)转向驱动力矩(假设机器重心与履带行走装垃几何中心相重合)把转向半径
R二纟和0WR<-分别考虑。
22
1)当转向半径R如下图所示,两侧履带都向前运动,此时两侧履带受地面摩擦
2
阻力朝同一方向(即行驶的反方向),外侧、内侧履带受力分別为:
图5-4右转向示意图
2)当转向半径0如下图所示,此时两侧履带受地面摩擦阻力朝反
2
方向,外侧、内侧履带受力分别为:
图5-5左转向示意图
式中:
◎-分别为内侧前进阻力和驱动力;
JJ-分别为外侧前进阻力和驱动力。
考虑机体的重心在中心位置,所以履带的前进阻力
为:
式中:
f—履带滚动阻力系数
(即巴迟--Gf=1160M戏盒2
转向时的最大驱动力矩为:
•也=max{E,j.Fq2}xr
式中:
r—驱动轮节圆直径。
3)大半径区/?
〉色转向行驶时主动轮上的力:
2
小半径区OSR<色转向行驶时主动轮上的力:
2
式中:
入一转向比,X=-
B
转向时的最大驱动力矩为:
•»(,,.=max{FqlFq2}xr
经过以上介绍及公式il•算得:
.»/=:
分别计算转向半径/?
〉三和OVRV色的情况:
22
得到:
匕兀Xi•二
得主动轮上的最大的驱动力及力矩为:
•也%Xr二所得结果相同。
4、传动装宜的设计与计算
(1)履带的选择
履带支承长度L,轨距B和履带板挂宽度b应合理匹配,使接地比压,附着性
能和转弯性能符合要求。
根据本机的设计参数,确定履带的主要参数为整机的重量。
本机的初定整机重量为:
•
4表示为接地长度,单位m,々表示履带的高度,单位m,G表示整机重量,单位为to经验公式:
Z^1.07Vg=X(1・9厂(1/3)二1・325山取Z0=1225
+二1600+X860二190仏
—^1.07即方~1495加
B
-^―=0.25~0.3即ba400~480mm取b=160mm
厶)
履带节距-和驱动轮齿数z应该满足强度、刚度要求。
在此情况下,尽量选择小的数
值,以降低履带高度。
根据节距与整机重量的关系:
-二(1討0,其中-的单位为mm,G的单
位为kg.
V表示履带全长
则L^2L)+—+丄〜2h+2△二4680她
2123丿
根据计算的与实际的资料:
选型号为52节,每节90mm,宽度400mm的履带。
(2)接地比压:
参照《GB/T7586-2008液压挖掘机试验方法》标准要求进行il•算:
拖拉机本身的重力
很大,很容易陷入松软的上地中,加上履带后增大了与地而的接触而积,减小了压
强:
L——履带接地长度,单位为m
5——接地比压,单位为KPa
氐一一标准重力加速度,9.8m/S=
M—工作质量,单位为Kg
W;——履带板宽,单位为m
五、驱动轮的计算
目前,履带啮合的设计标准,各种齿形的设计方法很多,极不统一,主要有等节距啮合方式、亚节距啮合方式和超节距啮合方式。
等节距啮合主要指履带节距与链轮节矩相等。
在等节距啮合时,履带啮合副是多齿传动,履带牵引力由啮合各齿分扌日,各个齿所受的负荷较小,此时啮合平稳、冲击振动小,使用寿命较长。
但在实际中,等节距啮合只是一个理论概念,因为即使在设计上使履带与链轮节距相等,履带在使用过程中将产生节距变化(如弹性伸长,履带销和销孔磨损伸长等),啮合实际上为超节距啮合。
且因图纸标注公差、制造误差等使履带在一定范围内波动,履带与链轮的啮合要么是超节距,要么是亚节距,等节距啮合实际上很难存在于啮合过程中。
在亚节距啮合过程中,链轮与履带销之间力的传递仅由即将退出啮合的一个链轮齿来完成,但对于频繁改变方向的机器,在减轻启动冲击方面很有利,而且随着亚节距量的増加,作用更加明显。
但在退出啮合时,履带销处于迟滞状态,严重时甚至由于运动干涉而不能退出啮合。
因此,在设计过程中应根据工作工况,灵活采取相适应的设计方法,使履带销顺利进入和退出啮合,减少接触面的冲击;使齿面接触应力满足要求,减小磨损;使履带节距因磨损而增大时仍能保持工作而不掉链等。
因此,综上考虑驱动轮选用链轮的设计方案。
1.确左驱动轮主要尺寸(则根据相关数据得):
分度圆直径(1==———=400zzz®
180"0.2079
sin
Z
齿顶圆直径d二一-一=84二395加
180"0.2126
tan
z
d®二d+=400^X84-48=457皿
齿根圆直径
/二〃+1—兰/7-Jr=400+11-—)x84-48=427.6mmaIzyI15丿
<=("457)加,根据相关数据取d=448mm
分度圆弦髙4=/^二400-48二352她
(
()q\(()x
0.625+—〃一0・5/=0.25+—x84-0.5x42=4.48/^
z)\15丿
隘二5一4)二X<84-48)二18m
2二(、18)mm、根据相关数据取=11.5mm
2.确左驱动轮齿槽形状
试验和使用表明,齿槽形状在一定范围内变动,在一般工况下对链传动的性能不会有很大影响。
这样安排不仅为不同使用要求情况时选择齿形参数留有了
很大余地。
同时,各种标准齿形的链轮之间也可以进行互换。
图5-6驱动轮图
齿面圆弧半径rr_=(z2+180)r_=(z+2)
齿沟圆弧半径<
匚运二^+师rma=d
则根据相关数据得:
齿面圆弧半径
r二(z2+180)=
r.=(z+2)=98/22fl7r
rF(98*nun
齿沟圆弧半径
r二+yjdr=mm
r..==24.24nunmln
r二、mn
齿沟角
90"
①瘁=14(T—=13/
z
6.变速箱及各档速度的计算
1.变速器各档位的关系
动力输出旋耕变速
档
二档
轴
齿编
号
齿数
Z
模数
m
传动
比
转数r/min
齿编
号
齿数
Z
模数
m
传动比
转数r/min
级
级
级
四级
五级
、
7\级
2、变速器结构设计与动力传递分析
变速器主要由机械式变速传动装置与静液压无极变速机构集成,主要包括箱体,其箱体上安装有动力输入部分、动力输岀轴减速部分、动力输出轴部分、液压无极变速换向部分、机械换挡部分、牙嵌式离合器转向控制部分、牙嵌式离合器转向传动部分、左侧履带驱动部分及右侧履带驱动部分,而箱体安装在发动机动力输出位置处。
液压无极变速换向部分中,液压马达安装于箱体一侧,液压传动轴一端安装于箱体内,另一端插装于液压传动花键轴内,液压传动花键轴安装于箱体内,且马达动力输入轴插装于液压传动花键轴内,马达动力输入轴、液压传动轴分别与液压传动花键轴花键配合并传递动力,从动锥齿轮通过花键套装于液压传动轴上,马达动力输出齿轮套装于马达动力输出轴上:
从动锥齿轮与动力输入部分中的主动锥齿轮啮合。
机械换挡部分中,换挡主动轴与换挡从动轴分别安装于箱体内,换挡主动齿轮套装于换挡主动轴,并与马达动力输岀齿轮啮合,在马达动力输出齿轮的驱动下换挡主动齿轮带动换挡主动轴旋转。
牙嵌式离合器转向控制部分中,左牙嵌式离合器控制部分与右牙嵌式离合器控制部分关于牙嵌式离合器主动齿轮对称设巻,牙嵌式离合器主动齿轮套装于牙嵌式离合器主轴上,且牙嵌式离合器主轴左端安装于左端盖内,左端盖紧固安装于箱体上,左控制摇臂用于对左离合套和左多片式制动器进行控制,左多片式制动器安装于箱体内,左离合套与左多片式制动器配介安装,左复位弹簧设置在左多片式制动器上方,左离合套同时与左牙嵌式离合器传动双联齿轮、牙嵌式离合器主动齿轮的左侧内齿圈啮合,将牙嵌式离合器主动齿轮的动力传递给左牙嵌式离合器传动双联齿轮:
而牙嵌式离合器主轴右端安装于右端盖内,右端盖紧固安装于箱体上,右控制摇臂用于对右离合套和右多片式制动器进行控制,右多片式制动器安装于箱体内,右离合套与右多片式制动器配合安装,右复位弹簧设置在右多片式制动器上方,右离合套同时与右牙嵌式离合器传动双联齿轮、牙嵌式离合器主动齿轮的右侧内齿圈啮合,将牙嵌式离合器主动齿轮的动力传递给右牙嵌式离合器传动双联齿轮。
1动力输入轴2箱体3静液压无极变速输入轴4齿轮换挡机构510牙嵌式离合转向机构69左右侧中间传动78左右驱动总成11静液压驱动系统
图5-7变速器结构图
图5-8动力传递路线图
七、燃油经济性计算
根据《GB/T15833-1995林业轮式和履带式拖拉机试验方法》标准要求进行计算:
1.平均小时工作油耗
GkGjkYtk
GfP=—J—=5kg./h
Z⑺
式中:
G“一一拖拉机进行单项作业时的平均小时工作油耗:
单位:
kg/h
G*——拖拉机进行单项作业时的总油耗:
单位:
kg
G推一一拖拉机发动机空转小时汕耗;单位:
kg/h
通过计算,满足要求。
八、制动性能计算
根据《GB/T农林车俩制动性能的确定》标准要求进行计算:
1、制动力
总质量:
H0二2200Kg二21560N
F二21560x二15092N
2、制动距离
=2.85m
式中:
6——滑转率取
V——制动初速度,r=7km/h=l.94m/s・
00
制动距离满足要求。
九、电源电路设计
采用柴油机驱动,电源系统主要包含蓄电池、启动电路、充电电路、发动机状态监测电路(水温、机油压力、转速)、仪表、灯光、喇叭等。
其中,蓄电池采用两个12V60AH并联组成24V供电电路,其所有电器系统采用24Y供电。
图5-9电源系统图
十、液压系统设计
共包含两组液压装苣。
一组为静液压驱动装置(注:
该机构选型后外协采购,主要由液压泵、液压马达、调速手柄、滤淸器、油箱等组成闭式系统),另一组为转向、举升液压装置组成,如下图所示:
。
图"10液压系统图
偶i哦i破口ioh价格低哦


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 履带 车辆 设计 计算 说明
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《爱和自由》读书心得15篇.docx
《爱和自由》读书心得15篇.docx
-
《极致服务》读后感.docx
-
《上海市饮用水水源保护条例》.docx
-
《变化社会中的政治秩序》读后感.docx
-
《吵闹村的孩子》读后感15篇.docx
-
《摆渡人》读后感受1000字左右范文.docx
-
《国际贸易学》题库南京大学.docx
-
《诚信备考》主题班会活动.docx
-
《高等学校教师职业道德修养》考试要点演示教学.docx
-
《巴菲特的护城河》精华摘要.docx
-
《繁星春水》读后感14篇.docx
-
#电控发动机的故障诊断与排除.docx
-
《归去来兮辞》优化教案及课文解析.docx
-
《办公室秘书个人党性分析材料》.docx
-
《会飞的气球》大班教案.docx
-
#生命生活与安全5上.docx
-
《城南旧事》的读后感作文范文10篇.docx
-
《标志用公共信息图形符号 第1部分通用符号》GBT 100011.docx
-
《初级会计实务》考试试题及答案解析.docx
-
《公共基础知识》考点《公文写作与处理》.docx
-
《海底世界》大班教案.docx
-
#ds18b20可调温度控制器.docx
-
《爱的教育》读书笔记范文10篇.docx
-
《公路养护工程量清单及计量规范》编制.docx
-
《建设工程监理规范》新旧版本区别.docx
-
《生活补助申请报告》.docx
-
《纸质档案管理规范》word版.docx
-
00种英语游戏.docx
-
09多元实用才能2.docx
-
《财经法规与会计职业道德》全真模拟试题及参考答案四.docx
-
14秋学前教育教育理论期中考试试题.docx
-
《大数据导论》19秋期末考核0001.docx
-
新概念英语第二册 词汇 文本 1.docx
-
新人教版三级数学下册510单元教案已整理含单元教学计划.docx
-
信贷业务心得体会.docx
-
学年八年级上学期期中考试科学试题.docx
-
学年下学期全国百强名校领军考试高三英语试题.docx
-
学校德育工作总结.docx
-
言语理解与表达汇总答案.docx
-
业务部管理制度.docx
-
一年级数学上册口算题练习卡精品推荐17.docx
-
医学影像诊断学期末考试精彩试题.docx
-
抑郁症自救指南.docx
-
英文租赁合同范本.docx
-
营销昆明电子商务网站网站建设方案.docx
-
优质文档有关毕业设计工作要求范文word版 11页.docx
-
幼儿园保育员业务考试试题A卷 含答案.docx
-
幼儿园中班学期的总结.docx
-
玉佛寺公园策划方案高德民32215051.docx
-
粤教版八年级地理下教案.docx
-
造价师考试复习经验.docx
