 PMCR参数.docx
PMCR参数.docx
- 文档编号:26433237
- 上传时间:2023-06-19
- 格式:DOCX
- 页数:18
- 大小:18.85KB
PMCR参数.docx
《PMCR参数.docx》由会员分享,可在线阅读,更多相关《PMCR参数.docx(18页珍藏版)》请在冰豆网上搜索。
PMCR参数
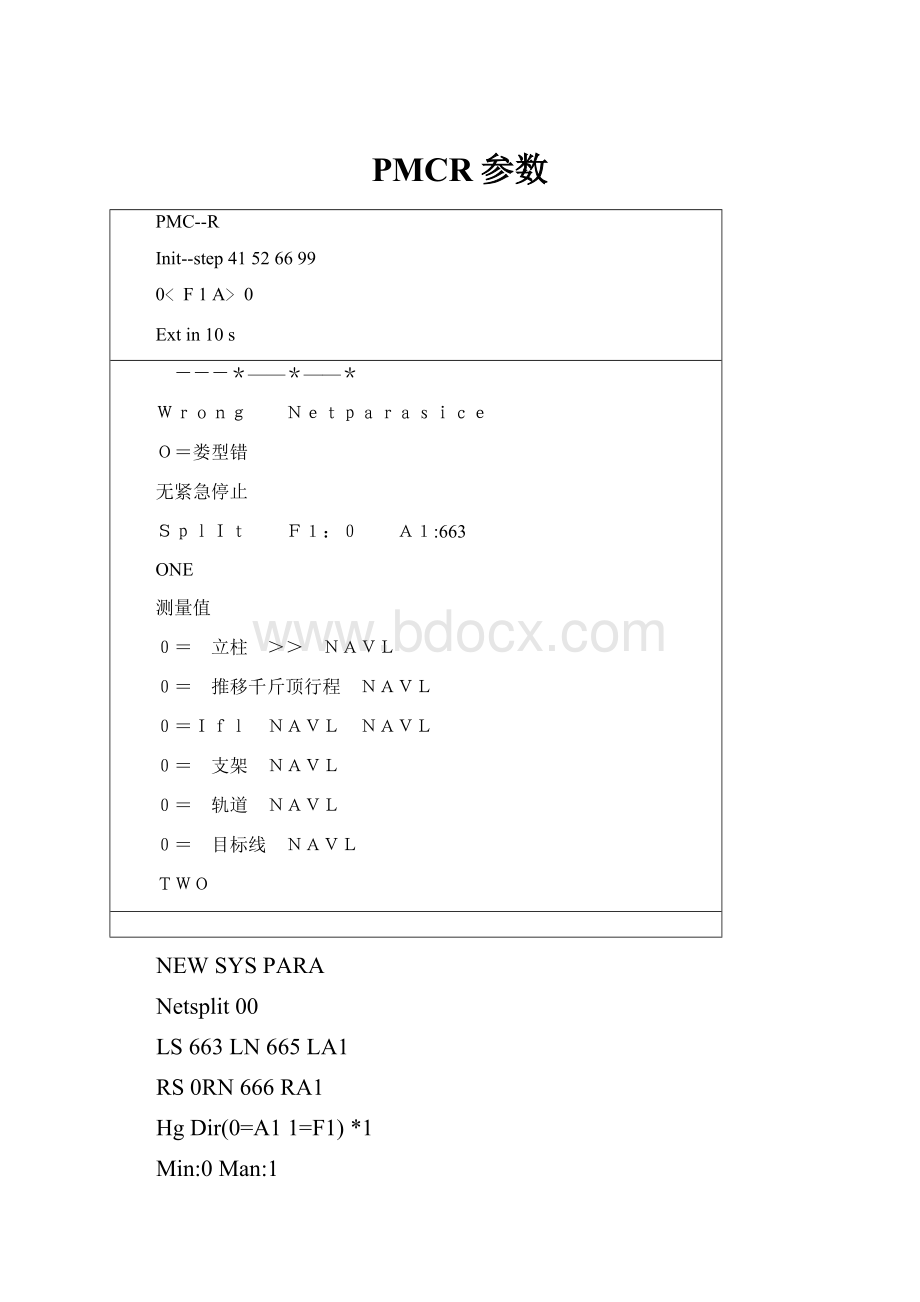
PMC--R
Init--step41526699
0﹤F1A﹥0
Extin10s
---*——*——*
Wrong Netparasice
O=娄型错
无紧急停止
SplIt F1:
0 A1:
663
ONE
测量值
0= 立柱 >> NAVL
0= 推移千斤顶行程 NAVL
0=Ifl NAVL NAVL
0= 支架 NAVL
0= 轨道 NAVL
0= 目标线 NAVL
TWO
NEWSYSPARA
Netsplit00
LS663LN665LA1
RS0RN666RA1
HgDir(0=A11=F1)*1
Min:
0Man:
1
HgExtSize*0
Min:
0Man:
0
FaceBeg*1
Min:
1Man:
470
FaceEnd*176
TgExtSize*0
Min:
0Man:
0
TgServer(1=YES)*0
Min:
0Man:
0
Mastrecod*4
Min:
1Man:
470
Helpnumber*470
Actnumslave R:
0 L:
0
I.0 -3762
出错信息;
=通信错A1>>> F1 <<<
=错误网络范围
共用参数
预警 *500
Min:
200Man:
2000
Baselift max开
Batch开
初掌力保持―――全局开
PossparFace开
AutoFlippers*1
Min:
0Man:
2
Sidesealman 开
Sidesealdiff开
主导时间*500
Min:
300Man:
2000
局部数值
初掌力保持―――自动开
Autoseq开
SRB_ASQ开
SRB---Bankpush开
运行轨道拉回开
运行轨道推移开
POS.SPARY开
FLIPPER开
BASTLIFT开
忽略立柱传感器数关
忽略推移千斤顶传感器数度数开
推移千斤顶测控杆*0
Min:
0Man:
1
推移千斤顶最大行程*900
Savemodsepo18--
VcubebugT---0*0
服务
装载程序到《》
装载程序到到全工作面《》
PMC重新设置(P)
删除程序(P)
清除错误(P)
发送共用参数(P)
Shenhua 13 01——09-00
pLLPOSITION―――――
SBR PARAMETERS
MODE 双向
S-ROOFSAVE 开
S-FLPEXT M>T 开
S-FLPEXT T>M 开
S-FLPRXT M>T 开
S-FLPRXT T>M 开
Srb:
sofop~~~
S____extT→M*500
Min:
0Man:
900
S____modeM→T*2
Min:
0Man:
2
S____trdck红外线
S__infra type *1
Min:
0Man:
3
S__first *1
Min:
0Man:
511
S__last *213
Min:
0Man:
5111
S__save ASQ *3
Min:
0Man:
50
S__Roofsave #*3
Min:
2Man:
5
S__save BP *7
Min:
2Man:
50
S__BP type *1
Min:
1Man:
2
S__DISTANIN*11
Min:
1Man:
511
S____DISTTAIL*104
Min:
1Man:
511
S____CTDMAIN*4
Min:
0Man:
50
S____turnMAIN*7
Min:
1Man:
511
S____turnTAIL*109
Min:
1Man:
511
S____pushMAIN*29
Min:
1Man:
511
S____pushTAIL*107
Min:
1Man:
511
S_____MGpush*15
Min:
1Man:
511
S_____TGpush*98
Min:
1Man:
511
S____autoseq#*4
Min:
1Man:
10
S____enterMAIN*5
Min:
1Man:
511
S____prewoffs*1
Min:
0Man:
10
S____flp.frist*O
Min:
1Man:
511
S____flp,last*112
Min:
1Man:
511
S_____flpret,dist*4
Min:
2Man:
30
S____flpextdist*10
Min:
2Man:
130
S____abs*5
Min:
1Man:
10
S____zone,SER*8
Min:
0Man:
10
S____zoneMAN*4
Min:
0Man:
10
S____offset*15
Min:
1Man:
20
S___POS.jump *3
Min:
2Man:
5
S__ref.dist *5
Min:
0Man:
30
S__ref.perc *875
Min:
720Man:
900
S__track〔min〕 *15
Min:
1Man:
30
S__resttart *5
Min:
0Man:
30
S__grp.mode MAIN *2
Min:
0Man:
2
S__grp.mode TAIN *2
Min:
0Man:
2
自动排序参数
Contact adv F *0
Min:
0Man:
1
Contart.adv G *0
Min:
0Man:
1
Y0F.LOW adv *7
Min:
0Man:
2
Y0G.LOW adv *7
Min:
0Man:
2
Y1F tip__func *1
Min:
0Man:
2
Y1G tip__func *0
Min:
0Man:
2
Y2 sides.ret *0
Min:
0Man:
10
Y3 adv + set *1
Min:
0Man:
1
Y4 refin *0
Min:
0Man:
2
Y5 water + adv *0
Min:
0Man:
3
Y6anti__pull*0
Min:
0Man:
1
Y7sideineig*0
Min:
0Man:
3
Y9flip.ret*1
Min:
0Man:
1
Y10flip,ext*0
Min:
0Man:
1
Y11Fbaselift*3
Min:
0Man:
3
Y11Gbaselift*3
Min:
0Man:
3
Y12Fretrylife*0
Min:
0Man:
1
Y12Gretrylife*0
Min:
0Man:
1
自动排序CO*3
Min:
0Man:
4
C1retrylife*0
Min:
0Man:
3
Pres。
To*2000
Min:
1000Man:
6000
自动排序T1*500
Min:
0Man:
2000
自动排序T2*700
Min:
100Man:
2000
自动排序T3*600
Min:
0Man:
2000
自动排序T4*500
Min:
0Man:
2000
自动排序T5*700
Min:
100Man:
2000
T6ready*300
Min:
100Man:
2000
T7Lowerp0*600
Min:
100Man:
2000
T8Tip__rel*100
Min:
0Man:
2000
T9Tip___low*50
Min:
0Man:
2000
T10prelow*400
Min:
0Man:
2000
T11trwai*9000
Min:
0Man:
18000
T12Frefill*10
Min:
0Man:
1000
T12Grefill*10
Min:
0Man:
1000
T13flp_____ext*800
Min:
0Man:
1000
T14.flp__ret*800
Min:
0Man:
1000
T15MG__IWR*300
Min:
0Man:
1000
T16TG__IWR*100
Min:
0Man:
1000
T17Lift*20
Min:
0Man:
2000
APO下降*80
Min:
50Man:
150
AP1传递*120
Min:
50Man:
250
AP2设定*300
Min:
150Man:
450
SToadv。
Stroke*25
Min:
0Man:
100
ST1slack*50
Min:
0Man:
100
ST2Flift—st *450
Min:
0Man:
900
ST2G lift——st *450
Min:
0Man:
900
SEMA。
asq——start
Min:
0Man:
1
NB。
Neigh——P1*1
Min:
0Man:
2
Targtline*0
Min:
0Man:
2
ASQprewarning*100
Min:
100Man:
1000
BATCHPARAMETER
顺序成组前移支架数*4
Min:
1Man:
10
成组模式SEQURABBRAND
成组超时*3000
Min:
1000Man:
3000
AsqHgseq*2
Min:
1Man:
3
AsqTgseq*2
Min:
1Man:
3
AsqGrpHg*3
Min:
1Man:
10
AsqGrpTG*3
Min:
1Man:
10
AsqTransHg*1
Min:
1Man:
10
AsqTransTg*1
Min:
1Man:
10
MGdiff。
Adv*0
Min:
1Man:
470
TGdiff。
Adv*0
Min:
1Man:
470
成组推移参数
BPstart*0
Min:
0Man:
511
BPent*0
Min:
0Man:
511
BPresetlocglb
顺序组推移支架数*16
Min:
1Man:
30
轨道推移距离*900
Min:
10Man:
900
BPMGext*880
Min:
1Man:
900
BPTGext*880
Min:
1Man:
900
推移千斤顶组动作间隔
Min:
1Man:
1000
推轨中断支架数目*4
Min:
0Man:
10
成组推移最小立柱压力*100
推轨时限T0*6000
Min:
0Man:
18000
组推移千斤顶安全模式
Min:
0Man:
3
BPsolidHg*0
Min:
0Man:
10
BPsolidTg*0
Min:
0Man:
10
BPsnake *14
Min:
0Man:
20
BPtype 全部支架
BP offset *1
Min:
1Man:
10
BP face *1
Min:
1Man:
3
BP Suspend *170
Min:
0Man:
400
BP Protect *300
Min:
0Man:
400
BP startGrp *4
Min:
0Man:
5
BP L——Key ext *880
Min:
0Man:
900
BP L——Key——T *300
Min:
0Man:
9999
运行轨道拉回
顺序拉轨支架组规模*11
轨道拉回支架数*10
min4max15
拉回运行轨道最大距离*0
拉轨支架组动作间隔*100
同时拉轨支架数*2
min0max5
最大轨道拉回时间*1000
min500max10000
CPdiff关
初掌力自动保持参数
PSAgroup*5
min1max20
初撑力保持 P0 *80
min80max500
初撑力保持 P0 *80
min100max500
初撑力保持 P0 *80
min180max500
初撑力保持 P0 *80
min500max5000
初撑力保持 P0 *80
min500max5000
初撑力保护计数 *3
min 0max3
FLIPPER PARAMETERS
FLP start *0
min0max511
FLP end *0
min0max511
FLP group *20
min1max20
FLP #at once *4
min1max5
flpextT1*500
min0max2000
flipretT1*1800
min0max4000
FLPPrew*200
min200max900
WSPPARAMETER
WSP:
400………
WSPgroup*5
min1max5
WSPtime*400
min0max3000
WSPSRBtm0*1000
min0max18000
WSPdrumsBOTH
WSPoffsMDMS*1
min0max10
WSPoffsMDTS*4
min0max10
WSPoffsTDMS*5
min0max10
WSPoffsTDTS*2
min0max10
LINEPARAMETER
convgap*50
min0max150
设定=轨道位置差*300
min1max3000
刨煤线差
min10max2000
LineP0*100
min10max600
紧急停车
无紧急停止
RuntimeACT=0
MAX=0MIN=-1
LostTeL-LACT=0
MAX=0ALL=0
LostTeL-RACT=0
MAX=0ALL=0
ACTivCOUNTLI=2247RE=2247
Clearstatus(n)
诊断
IfrDate:
00hex
支架序号000N
S:
0663(00)
n:
666,665,696(0)
CycleTime1900
Ltime:
1
Lmi:
11Lma340
前一个操作无
停止命令于支架~~~NAVL
6S16,60
I total :
121(119) 129
I B+C 10 10
I SCU 109(109) 119
I OUt 0 0
I A2D1D2 0 0
V SCU 12119
VS min 0 max 12155
V OUT 12207
V0 min 0max 12230
VCP1 1149mv 1 0
VCP2 8mv 1 0
0 0:
ALL Bid
S:
0 R:
0
0<F1 1 A1>0 E
Q:
1 NEQO
FlashBoter-R-00-05-03d btpMC
2020-4-517:
07
BOOTER.CRC:
e963
shenhua-SDB-01-09-00.dbtpMC
14/11/06 12:
07.APPL
CRC:
7815
PISP br.- +
PISP cont - +
编码插头类型 0
codevalve 0 =Lstar 1800
Ver,flash OM OS OR
Ver,Booter OM OS OR
Ver,Apilib 1M 25S 2R
Ver,Baselib 1M 25S 2R
Ver,FPGA1 2M 1S 4R
Ver,FPGA2 2M 1S 4R
Ver,clibData 5M 0S 0R
Ver,DispBoot 0M 0S 2R
Ver,VentApp1 4M 0S1 0R
Ver,ventBoot 0M. 0S. OR
Ver,VentApp1 OM OS OR
IOS:
OR:
1


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- PMCR 参数
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 #2机组现场施工用电布置措施.docx
#2机组现场施工用电布置措施.docx
-
《个人贵金属质押借款合同》兴业银行.docx
-
《科学发展观和小康社会的经济建设》复习导学案.docx
-
《我和祖父的园子》第一课时教案两篇word.docx
-
《质量》教学案例与设计.docx
-
2惠农小册子.docx
-
7A版个人与团队模拟考试题及答案.docx
-
10篇新部编四年级下册语文课内外阅读理解专项练习题及答案.docx
-
16初四物理热和能知识点总结精讲.docx
-
20XX社会语言经典语录流行风暴.docx
-
48篇教学案例分析报告题.docx
-
《电子工厂安全管理制度汇总》.docx
-
《机械制造课程设计》指导.docx
-
《钱学森》教案第二课时.docx
-
《边城》读后感5篇.docx
-
《固定式压力容器安全技术监察规程》.docx
-
《论雷峰塔的倒掉》.docx
-
《手术台就是阵地》教学设计三年级语文下册.docx
-
《夏洛的网》课外阅读教学设计.docx
-
《自己的花是让别人看的》教案.docx
-
3C检查表090429.docx
-
7客运专线CRTSⅡ型板式无砟轨道施工工法.docx
-
《笔算除法》课时教案设计.docx
-
11#楼高大模板支撑体系专项方案.docx
-
17科学分析经济形势.docx
-
《电流和电路》易错题精讲综合检测题与答案.docx
-
《会计信息系统》习题含答案.docx
-
《汽车电器设备与维修》发电机分教考分离试题及标准答案.docx
-
《四川省排污许可证管理暂行办法》.docx
-
《新编实用英语》教案第一册Unit.docx
-
0母版锅炉值班员计算题WORD版.docx
-
3年级下册英语单词记忆人教版.docx
-
下学期幼儿园保健工作计划Word文件下载.docx
-
乡镇派出所年终工作总结Word文件下载.docx
-
设备管理系统一Word格式文档下载.docx
-
小学教师授课教案Word文档格式.docx
-
声Word下载.docx
-
小学三年级奥数题练习及答案解析12文档格式.docx
-
市民学校活动策划书Word文档下载推荐.docx
-
英语语法知识树课案Word文件下载.docx
-
中医学习笔记Word文档格式.docx
-
室内装饰材料大全Word下载.docx
-
四川普通高等学校音乐类专业招生简章Word格式文档下载.docx
-
学年人教版七年级下期末考试数学试题及答案解析文档格式.docx
-
学年高中语文 第四单元 决胜疆场的艺术 7 孙膑学案 鲁人版选修《史记选读》Word格式文档下载.docx
-
云南省昆明市中考英语专题复习 第三部分 重难题型研集训 题型三 阅读理解试题Word文档格式.docx
-
外研版四年级英语下册教案Word格式.docx
-
知识学习五年级科学质量检测分析报告Word格式.docx
-
实验4Linux文件系统命令Word文件下载.docx
-
学生会竞选自荐书范文三篇Word格式文档下载.docx
-
暑假建设工地实习报告Word格式文档下载.docx
