 控制基础选择题复习资料doc.docx
控制基础选择题复习资料doc.docx
- 文档编号:26290364
- 上传时间:2023-06-17
- 格式:DOCX
- 页数:18
- 大小:188.84KB
控制基础选择题复习资料doc.docx
《控制基础选择题复习资料doc.docx》由会员分享,可在线阅读,更多相关《控制基础选择题复习资料doc.docx(18页珍藏版)》请在冰豆网上搜索。
控制基础选择题复习资料doc
1•自动控制系统的反馈环节中必须具有[b]
a.给定元件b.检测元件
c.放大元件d.执行元件
3.如果系统不稳定,则系统[a]
乩不能工作b.可以工作,但稳态误差很大
c.可以工作,但过渡过程时间很长d.可以正常工作
5.单位阶跃函数l(t)的拉氏变换式L[l(t)]为[B]:
a.Sb.丄c.-J-d.S2
SS2
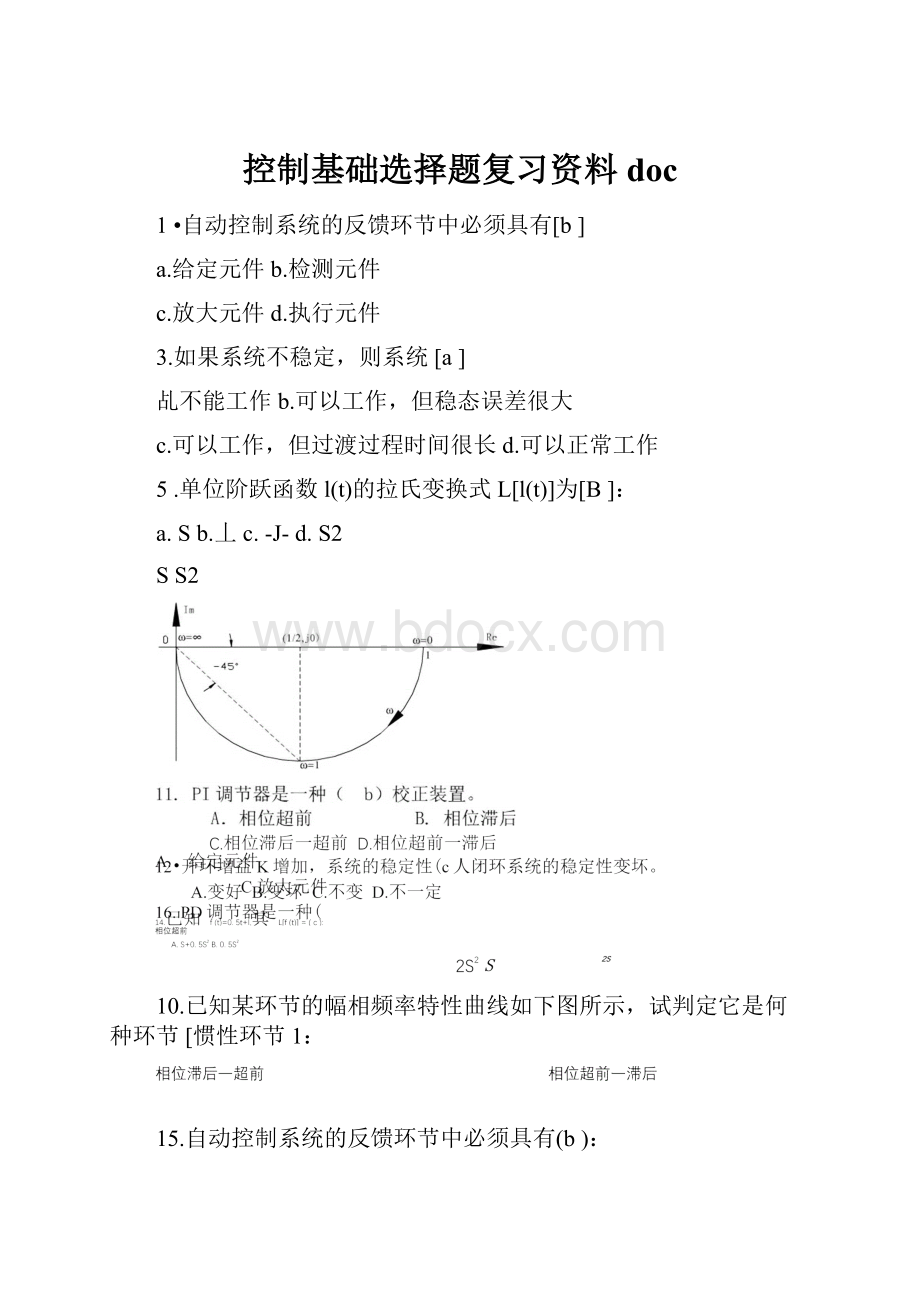
10.已知某环节的幅相频率特性曲线如下图所示,试判定它是何种环节[惯性环节1:
15.自动控制系统的反馈环节中必须具有(b):
B.检测元件
D.执行元件a)校正装置。
相位滞后
17.已知最小相位系统的开环对数幅频特性曲线的渐近线如下图所示,试确定其
(rad/s))
3~~5101230
18.已知系统的特征方程为S'+S'+tS+5二0,则系统稳定的t值范围为(c)o
T>0;B・T<0;C・T>5;D.0 19. 闭环系统的开环传递函数的积分环节v增加,系统的稳态性能(a): 21.振荡环节的传递函数为(c)。 A. %/&+223.S+1) B.3“/(S2+23.S+1) D.1/[S(TS+1)] 22.函数b+cei,l(t^0)的拉氏变换是(c)o A、bS+c/(S+l); B>bS-c/(S+a); C、b/S+c/(S+a); D、b/S+c/(S-a) 23.反映控制系统稳态性能的指标为(d): A.MpB.tsC.trD.ess 24.在阶跃函数输入作用下,阻尼比(a)的二阶系统,其响应具有等幅振荡 性。 A.匚=0B.匚>1C.匚=1D.0<^<1 25.如果自控系统微分方程的特征方程的根在复平面上的位置均在右半平面, 那么系统为(b)系统: A.稳定B.不稳定 C.稳定边界D.不确定 29.cos2t的拉普拉斯变换式是 C. S S2+4 D. S2 B. S2+4 30.控制系统的稳态误差反映了系统的 B. A.快速性 稳态性能 C.稳定性D.动态性能 31.对于典型二阶系统,在欠阻尼状态下,如果增加阻尼比§的数值,则其动态 性能指标中的最大超调量将〔d) A.增加B.不变 C.不一定D.减少 32.开环增益K增加,系统的稳态性能Q): A.变好B.变坏C.不变D.不一定 33.开环传递函数的积分环节v增加,系统的稳态性能(a): A.变好B.变坏C.不变D.不一定 34.已知系统的开环传递函数为: G(S)H(S)=K(tS+D/EC^S+l)(T2S+1)(T2S2+2^TS+1)],则它的对数幅频特性渐近线在3趋于无穷大处的斜率为(c)(单位均为dB/十倍频程)。 A、-20;B、-40;C、-60;D、-80 35.以下频域性能指标中根据开环系统来定义的是(d)。 A.截止频率3屛谐振频率3「与谐振峰值Mr;C、频带宽度;D、相位裕量「与幅值裕量Kg 36•开环增益K减小,系统的稳定性(c): A.变好B.变坏C.不变D.不一定 38.以下性能指标中不能反映系统响应速度的指标为(c) A.上升时间trB.调整时间ts C.幅值穿越频率3c 39.已知f(t)=0.5t+l,其L[f(t)]=(c): D,2S A.S+0.5S2B.0.5S2C.丄+丄 2S2S 41•对于典型二阶系统,当阻尼比不变时,如果增加无阻尼振荡频率3“的数值,则其动态性能指标中的调整时间tS(b)o A、增加;B、减少;C、不变;D、不定 42.对于典型二阶系统,当(b)时,最大超调量Mp为0。 A、匚二0;B>C=1;C>0 43.下列函数既可用初值定理求其初值又可用终值定理求其终值的为: (d)o A.5/(S2+25);B.5/(S2+16); C.1/(S-2);D.1/(S+2) 44.已知系统的频率特性为G(jo)=K(l+jO.53)/[(l+jO・33)(l+jO・83)],其相频特性ZG(j3)为Q)。 A>arctgO>5w-a.rctg0>3w-a.rctg0>8w B>-arctg0.53一arctg0.3w一arctg0.8w C、-arctgO.5w+arctgO.3co+arctgO. D、arctgO.5w+arctgO.3to+arctgO.8oj 45.根据下面的开环波德图,试判断闭环系统的稳定性(a)。 A、稳定;B>不稳定;C、条件稳定;D、临界稳定 -180° (apumoe co 46•函数b+cea,(t^0)的拉氏变换是(c)。 A、bS+c/(S+l);B、bS-c/(S+a);C、b/S+c/(S+a); D、b/S+c/(S-a) 48•对于典型二阶系统,当阻尼比不变时,如果增加无阻尼振荡频率3“的数值,则其动态性能指标中的调整时间ts(b)o A、增加;B、减少;C、不变;D、不定 52.典型二阶系统在无阻尼情况下的阻尼比E等于(A) A.2二0B.<0 C.0 54.某环节的传递函数为竺巳则此系统的相频特性(b〕 S(5S+1) B.+tg2co(arctg2w)-tg"5s(arctg5w)2 57.已知某单位负反馈控制系统在单位加速度信号作用下,其稳态误差等于不为0的常数,则此系统为(c)系统 A.0型 C.II型D. 58.2sin2t的拉普拉斯变换式是 C.—D.- 255 62.—般来说,如果开环系统增加积分环节,则其闭环系统稳定性(b) A.变好B.变坏 C.可能变好也可能变坏D.不变 63. a 某系统的开环传递函数为加则此系统的开环增益为( A.3B.2C. 64.在右图所示的伯德图中3c二(k A.K2B.丄 K c.4kd.k 特性的相位角为(B B.-180° D.90° 69.4.已知函数F(s)=-,V+1,则f(/)的终值/-(oo)=Ds(s+q) A.零B.无穷大 C.aD.1/a 70.某系统的传递函数G($)=—,则©等于 52+125+100 A.0.01rad/sB.0.lrad/s C.lrad/sD.lOrad/s 71•当系统的输入和输出已知时,求系统结构与参数的问题,称为(B) A.最优控制 B.系统辩识 C.系统校正 D.自适应控制 72.反馈控制系统是指系统中有(A) A.反馈回路 B.惯性环节 C.积分环节 D.PID调节器 73.(A)-1,(a为常数)。 s+a A.LLe~at] B.L[eat] C.L[e«a)] D.L[e-(l+a)] 74.L[t2e2t]=(B) A.1〈 B.1 (s-2)3 a(s+a) 小2 2 C.2 D.二 Cv-2)3 3 75•若F(s)二一^―,则Limf(t)二(B) 2s+l(to B. A.4 c.o 2 D.8 76.已知f(t)=eat,(a为实数),则L[£f(t)dt]=(C) 78.某系统的微分方程为5乂()(t)+2玄()(t)・x()(t)=Xi(t),它是(C)? 另: 把后面乘号变加选A A.线性系统B.线性定常系统 C.非线性系统D.非线性时变系统 79.某环节的传递函数为G⑸=e~2s,它是(B) A.比例环节B.延时环节 C.惯性环节D.微分环节 81•二阶系统的传递函数为G(沪—其无阻尼固有频率叭是() C.2.5 A.10 B.5 82•—阶系统亠的单位脉冲响应曲线在t二0处的斜率为(1+Ts A.上 T B.KT D.25 83•某系统的传递函数G⑸二」一,则其单位阶跃响应函数为(C TS+1 A.丄CWTB.-e-t/T TT C.K(l-etT) 15.延时环节G(s)=e_TS的相频特性ZG(j3 A.TGJB.-TW C.90°D.180° 86•对数幅频特性的渐近线如图所示, 它对应的传递函数G⑸为D) B.丄 1+Ts A.1+Ts D.(1+Ts)2 D.(1-eK(T) Im 87.图示对应的环节为(C) A.Ts B.丄 1+Ts C.1+Ts D.丄Ts 8&设系统的特征方程为DG)二s3+14s2+40s4-40t二0,则此系统稳定的t值范围为(B) A.t>0B.0 89•典型二阶振荡环节的峰值时间与( A.增益 C.增益和阻尼比 90•若系统的Bode图在3二5处出现 转折(如图所示),这说明系统中有 (D)环节。 A.5s+l D.i<0 C.0.2s+l B.(5s+1)2 C.T>14 D)有关。 B.误差带 D.阻尼比和无阻尼固有频率 91.某系统的传递函数为G(S)J': +7)(_2) (4s+l)(s-3) 其零、极点是(D) A.零点s二0.25,s二3;极点s=-7,s=2 C.零点s二7,s=2;极点、s=-l,s=3 92.—系统的开环传递函数为%s+2) s(2s+3)(s+5) B.零点s二7,s二2;极点s二0.25,s二3 D.零点s=-7,s=2;极点s=-0.25,s=3 ,则系统的开环增益和型次依次为 (A) A.0.4,I II 93.已知系统的传递函数G(s)二若广 B.0.4,II C.3,I D.3, ,其幅频特性丨G(j3)|应为(D) A.亠尹 1+Tcd DJl+T® 95•设a。 为幅值穿越(交界)频率,为开环频率特性幅值为1时的相位角,则相位裕度为(C) a.180°—©(3』b.e(3c) C.180°+"(%)D.90°+"(%) 96•单位反馈控制系统的开环传递函数为G(s)=^—,则系统在r(t)=2t输入作用 s(s+5) 下,其稳态误差为(A)? B A. B. C. D.0 97.二阶系统的传递函数为G(s)二一1——,在0<〔<芈时,其无阻尼固有s~+2^C0ns+CD~2 频率3n与谐振频率3r的关系为(C) C.wn>wrD.两者无 B.提高系统的稳态精度 减少系统的固有频率 A.3齐3「B.3产3「 关 98.串联相位滞后校正通常用于(B) A.提高系统的快速性 C.减少系统的阻尼 100.自动控制系统的反馈环节中必须具有(B): A.给定元件B.检测元件 C.放大元件D.执行元件 1 102.(A)二肓,Q为常数)。 A.L[e_a,]B.LLeat]C.LLe_ 3 103.二阶系统的传递函数为G(s)二——,其无阻尼固有频率3“是 5-+$+100 (A) 04.典型二阶振荡环节的峰值时间与(A)无关。 A.增益B.阻尼比C.无阻尼固有频率 A.稳定B.不稳定 C.稳定边界D.不确定 05・右图为开环伯徳图,p为开环极点个数,该系统的稳定性: [A: : 10 6.已知系统的开环传递函数为$(4S+1),(? 10变为 15)则在3-00时,它的频率特性的相位角为〔 B) A.-270度B.-180度C.-90度D.90度 9.某系统在单位阶跃信号作用下,其输出具有周期特性,则该系统可能是D A.一阶系统B.阻尼比E=1的二阶系统 C.阻尼比2>1的二阶系统D.阻尼比2=0的二阶系统 10某系统的传递函数G(s)=—,则阻尼比等于B 屛+12x100 A.1.2B.0.6 C.0.3D.2.4 11・若某系统的输入为等加速信号r(t)=-t2时,其稳态误差j二则此系统2 不可能为0 A.0型系统BI型系统CII型系统 12.线性系统在余弦输入信号作用下,其稳态输出与输入的(B) A.相位相等B.频率相等 C.幅值相等D.频率不相等 13.对典型二阶系统,当(C)时,最大超调量6为零 A.E二0B.OVEVIC.§>114.系统的传递函数与(D)有关。 A.输入量的大小B.输入量的作用点 C.所选输出量D.系统的结构和参数15.增大开环增益K将对系统对数幅频频率特性曲线的影响是A A.使对数幅频特性曲线向上平移 B.使对数幅频特性曲线低频段的斜率改变 C.使相频特性曲线产生平移 D.对相频特性曲线不产生任何影响 16•二阶减幅振荡环节的对数幅频特性曲线的渐近线为(A) A.低频为水平线,高频为斜率为负直线 B.高频为水平线,低频为斜率为负直线 C.低频为水平线, 高频为斜率为止直线 D.高频为水平线, 低频为斜率为止直线 17.积分环节的的对数幅频特性曲线渐近线为(A) A.斜率为负直线B.为水平线,C.为斜率为正直线 18•延时环节的奈氏曲线为(A) A.圆心为原点,半径为1的圆。 B.圆心为(1/2,0j)的半 圆。 C.沿着虚轴向负无穷方向的直线D.沿着虚轴竖直向上的直线 19.奈氏曲线上的与单位圆交点对应与伯徳图上的(D) A.0DB线B.原点C.相频图上原点D.幅频与ODB线交点。 20.下列运动系统中,有反馈进行控制的是(C) A.狙击手射击B.篮球运动员投篮C.导弹拦截系统 I、反馈控制系统是指系统中有(A) A.反馈回路B.惯性环节C.积分环节D.PID调节器 II、控制系统的稳态误差反映了系统的(C) A.快速性B.稳定性C.稳态性能D.动态性能 12、如果自控系统开环微分方程的特征方程的根在复平面上的位置有一个在GH 平而右半平而,那么系统为(d)系统: A.稳定边界B.稳定C.不稳定D.不确定 17、在阶跃函数输入作用下,阻尼比(D)的二阶系统,其响应具有减幅振荡 特性。 A.7=0B.〔>1C.g=1D.0<^ 18、开环增益K增加,系统的稳态性能(A): A.变好B.不一定C.不变D.变坏 19、开环传递函数的积分环节v增加,系统的稳态性能(D): A.不一定B.变坏C.不变D.变好


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 控制 基础 选择题 复习资料 doc
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《初级会计实务》试题题库大全及答案详解.docx
《初级会计实务》试题题库大全及答案详解.docx
-
《管理学》习题教材15章.docx
-
《教育学》读后感范文精选6篇.docx
-
《林教头风雪山神庙》练习题.docx
-
《企业文化》期末复习应考指南央专.docx
-
《数据结构》知识题汇编09第九章排序试题.docx
-
《偷影子的人》读后感集合15篇.docx
-
《幼儿园工作规程》.docx
-
《残疾人证》管理办法.docx
-
《故事》教学反思.docx
-
《Java语言学习知识程序设计》复习资料汇编.docx
-
《短文两篇》课堂实录.docx
-
《基于MATLAB的信号与系统实验指导》编程练习试题doc.docx
-
《昆虫记》好词好句大全.docx
-
《木棉树》阅读答案.docx
-
《区间信号自动控制》练习册答案.docx
-
《山东省中小学教师职称评审表》高级教师一级教师二级教师专用A4纸正反面打印按页码装订许知忠.docx
-
《安娜卡列尼娜》读后感.docx
-
《繁星春水》读后感15篇.docx
-
《苏州市市级示范物业管理项目服务质量评价标准》 doc.docx
-
《采薇》教案.docx
-
《假如给我三天光明》阅读测试题有答案.docx
-
《小学数学教师》读书笔记精选多篇.docx
-
《给幼儿教师的一把钥匙》读书笔记.docx
-
《劳动法》教案设计.docx
-
《综合基础知识》必看考点《刑法》含答案.docx
-
《建筑构造》考试试题及答案精华.docx
-
3套打包北师大版四年级下册英语期末单元测试题解析版.docx
-
《雷锋的微笑》观后感.docx
-
《女人故事》电视栏目策划方案1.docx
-
7万多车对比分解.docx
-
《调皮的日子》题库.docx
-
外科学复习资料第50章周围血管和淋巴管疾病docx.docx
-
初一英语教案模板范文5篇.docx
-
初中地理知识点复习总结中国地理.docx
-
完整word版苏教小学四年级上英语阅读练习题.docx
-
初中物理必背实验操作汇总共14个实验题不扣分.docx
-
初中英语八种时态讲解.docx
-
碗莲的全年养护管理.docx
-
网格化精准营销策划方案.docx
-
船舶安全和关键设备检查项目表.docx
-
第四分册土方开挖.docx
-
第一单元 有余数的除法.docx
-
点焊工艺基础知识.docx
-
二年级培智实用语文教案部分第四册.docx
-
现在完成时的用法解析.docx
-
电机单机试车方案doc.docx
-
小学生作文建议书评语.docx
-
二年级语文下册教学计划.docx
-
电力排管表格.docx
-
项目部岗位责任书.docx
