 第二章控制系统的数学模型书后习题答案.docx
第二章控制系统的数学模型书后习题答案.docx
- 文档编号:26246333
- 上传时间:2023-06-17
- 格式:DOCX
- 页数:11
- 大小:369.26KB
第二章控制系统的数学模型书后习题答案.docx
《第二章控制系统的数学模型书后习题答案.docx》由会员分享,可在线阅读,更多相关《第二章控制系统的数学模型书后习题答案.docx(11页珍藏版)》请在冰豆网上搜索。
第二章控制系统的数学模型书后习题答案
第一章控制系统导论
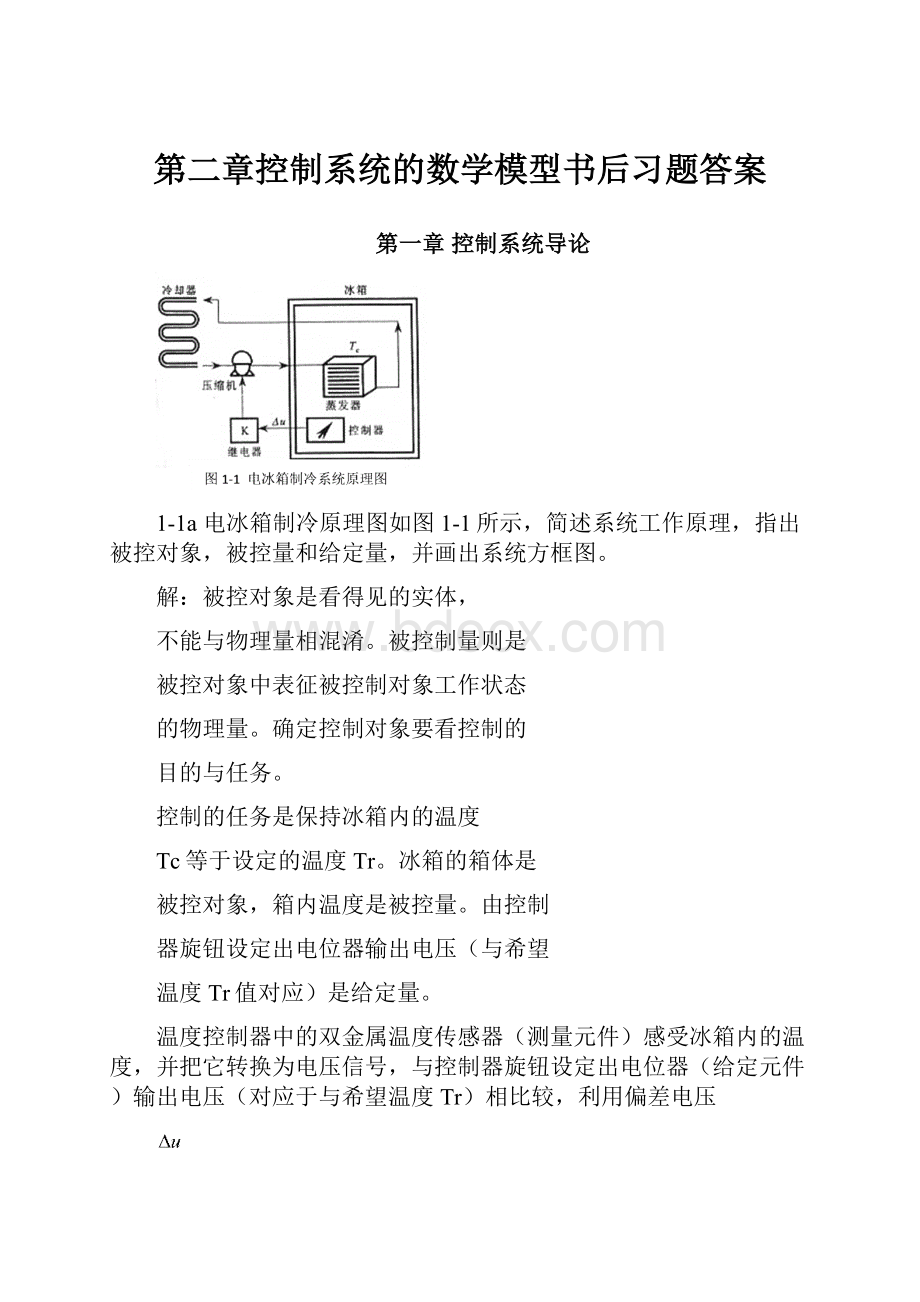
1-1a电冰箱制冷原理图如图1-1所示,简述系统工作原理,指出被控对象,被控量和给定量,并画出系统方框图。
解:
被控对象是看得见的实体,
不能与物理量相混淆。
被控制量则是
被控对象中表征被控制对象工作状态
的物理量。
确定控制对象要看控制的
目的与任务。
控制的任务是保持冰箱内的温度
Tc等于设定的温度Tr。
冰箱的箱体是
被控对象,箱内温度是被控量。
由控制
器旋钮设定出电位器输出电压(与希望
温度Tr值对应)是给定量。
温度控制器中的双金属温度传感器(测量元件)感受冰箱内的温度,并把它转换为电压信号,与控制器旋钮设定出电位器(给定元件)输出电压(对应于与希望温度Tr)相比较,利用偏差电压
(表征实际温度和希望温度的偏差)控制继电器。
当
大到一定的值时,继电器接通压缩机起动将蒸发器中的高温低压气态制冷液送到冷却器散热。
降温后流出的低温低压冷却液被压缩成低温高压液态进入蒸发器急速降压扩散成气体,吸收箱体内的热量,使箱体内温度降低,而高温低压制冷剂又被吸入冷却器。
如此循环,使冰箱达到制冷效果。
继电器,压缩机,蒸发器和冷却器组成系统的执行机构,完成降温功能。
冰箱制冷系统方框图如图1-2所示。
1-2a 图1-3为液位控制系统的示意图,试说明其工作原理并绘制系统的方框图。
说明液位控制系统是一典型的过程
控制系统。
控制的任务是:
在各种扰动的
作用下尽可能保持液面高度在期望的位置
上。
故它属于恒值调节系统。
现以水位控
制系统为例分析如下。
解 分析图1-3可以看到:
被控量为水位
高度h(而不是水流量Q2或进水流量Q1);
受控对象为水箱;使水位发生变化的主要
原因是用水流量Q2,故它为系统的负载扰
动;而进水流量Q1是用以补偿用水流量的
改变,使水箱的水位保持在期望的位置上的
控制作用;控制进水流量的使由电动机驱动的阀门V1,故电动机-减速器-阀门V1一起构成系统的执行机构;而电动机的供电电压ud取决于电位器动触点与接零点之间的电位差,若记接零点与电位参考点之间的电压为ug,则它便是系统的给定信号,记动触点与电位参考点之间的电压为uf,而ud=ug-uf,故uf为负反馈信号。
于是可绘制系统方框图,如图1-4所示。
系统的调节过程如下:
调整系统和进水阀V1的开度使系统处于平衡状态,这时进水流量Q1和额定的用水流量Q2保持动态平衡,液面的高度恰好在期望的位置上,而与浮子杠杆相联接的电位器动触头正好在电位器中点(即接零点)上,从而ud=0电动机停止不动;当用水流量发生变化时,比如用水流量增大使得液面下降,于是浮子也跟着下降,通过杠杆作用带动电位器的动触点往上移,从而给电动机电枢提供一定的电压,设其极性为正的(即ud>0),于是电动机正转,通过减速器驱动阀门V1增大其开度。
1-3b图1-5是烤面包机的原理图。
面包的烘烤质量烤箱内的温度决及烘烤时间决定。
(1)试说明传动带速度自动控制的工作原理,并绘制相应的原理方框图。
(2)绘制烤面包机的方框图。
解
(1)传送带
由电动机和减速器驱动,传送带的
线速度与电动机及减速器的角速度
是固定比例关系,因此控制电动机
减速器的角速度就控制了传送器的
线速度。
传送器的希望速度与温度
有关。
温度高,要求速度快,温度
低要求速度慢。
烤箱内温度检测器测出烤箱内
的温度,传给指示调节器。
指示调节
器根据预先规定的函数关系求出希望的速度,并变成相应的电信号作为调速系统的控制输入加到控制器上。
控制器带动电动机,减速器驱动传送带运动。
转速表测出减速器的实际速度,反馈到控制器,若与要求转速不等,则产生偏差信号。
通过控制器控制电动机加速或减速,使速度趋于希望的速度。
该调速系统的方框图如图1-6所示。
(2)面包的烘烤质量与烤箱温度与面包在烘箱内的时间有关,而烘烤时间又与传送带的速度有关。
在该烤面
包机中,只控制烘烤时间
而未控制烘烤温度。
但希
望的烘烤时间又与温度有
关。
该系统可以看作一个
按扰动补偿的开环控制系
统,温度就是扰动量,方框图如图1-7所示。
第二章控制系统的数学模型
2-1 试证明图2-77(a)所示电气网络与图2-77(b)所示的机械系统具有相同的传递函数。
解:
对于图(a)所示的电气网络,其传递函数
,可以求得为
(1)
而图(b)所示的机械系统的运动方程
(2)
(3)
假设初始条件为零对上述二个微分方程进行拉氏变换得到
(4)
(5)
从(4)(5)两个方程中消去Y(S)得到
即
(6)
因此,
比较式
(1)与式(7)可知,两个系统传递函数相同,且两系统变量间有如下相似对应关系
电压u 对应 位移x
电阻R 对应 粘滞阻尼系数B
电容C 对应 弹性系数得倒数1/k
2-2试分别写出图2-2中各有源网络的传递函数Uc(s)/Ur(s)。
解:
图2-78(a)所示的有源网络传递函数Uc(s)/Ur(s)可以求得为,
应有负号?
图2-78(b)示的有源网络传递函数Uc(s)/Ur(s)可以求得为,
应有负号?
图2-78(c)所示的有源网络传递函数Uc(s)/Ur(s)可以求得为,
应有负号?
2-4图2-80是一个转速控
制系统,输入量是电压U,
输出量是负载的转速ω,画
出系统结构图,并写出输入
输出间的数学表达式。
解:
1列出各部分的微分方程
1)
2}
ω
3) Md=Kmia
4)
,
为电磁力矩与负载力矩
2对上面的方程组进行拉氏变换,并画出系统结构图如图2-4所示
1)
2)Eb(s)=Keω(s)
3)Md(s)=Kmia(s)
4)
3消除中间变量
,得到系统传递函数:
2-6 图2-81是一个模拟控制器的电路示意图。
1)写出输入Ur与输出Uc之间的微分方程;2)建立该控制器的结构图;3)求闭环传递函数Uc(s)/Ur(s);4)当R1=R2=R3=R4=100KΩ;
;输入
,求
的稳态输出。
解:
(1)列出输入Ur与输出Uc之间的微分方程
(2)将上式两边拉氏变换并画出系统结构图如图2-6所示。
(3)求闭环传递函数Uc(s)/Ur(s)
(4)当
;


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 第二 控制系统 数学模型 书后 习题 答案
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《初级会计实务》试题题库大全及答案详解.docx
《初级会计实务》试题题库大全及答案详解.docx
-
《管理学》习题教材15章.docx
-
《教育学》读后感范文精选6篇.docx
-
《林教头风雪山神庙》练习题.docx
-
《企业文化》期末复习应考指南央专.docx
-
《数据结构》知识题汇编09第九章排序试题.docx
-
《偷影子的人》读后感集合15篇.docx
-
《幼儿园工作规程》.docx
-
《残疾人证》管理办法.docx
-
《故事》教学反思.docx
-
《Java语言学习知识程序设计》复习资料汇编.docx
-
《短文两篇》课堂实录.docx
-
《基于MATLAB的信号与系统实验指导》编程练习试题doc.docx
-
《昆虫记》好词好句大全.docx
-
《木棉树》阅读答案.docx
-
《区间信号自动控制》练习册答案.docx
-
《山东省中小学教师职称评审表》高级教师一级教师二级教师专用A4纸正反面打印按页码装订许知忠.docx
-
《安娜卡列尼娜》读后感.docx
-
《繁星春水》读后感15篇.docx
-
《苏州市市级示范物业管理项目服务质量评价标准》 doc.docx
-
《采薇》教案.docx
-
《假如给我三天光明》阅读测试题有答案.docx
-
《小学数学教师》读书笔记精选多篇.docx
-
《给幼儿教师的一把钥匙》读书笔记.docx
-
《劳动法》教案设计.docx
-
《综合基础知识》必看考点《刑法》含答案.docx
-
《建筑构造》考试试题及答案精华.docx
-
3套打包北师大版四年级下册英语期末单元测试题解析版.docx
-
《雷锋的微笑》观后感.docx
-
《女人故事》电视栏目策划方案1.docx
-
7万多车对比分解.docx
-
《调皮的日子》题库.docx
-
大学实习报告万能.docx
-
贝雷梁钢便桥计算书.docx
-
《铸造粘结剂喷射用呋喃树脂》团体标准编制说明.docx
-
餐饮融资方案模板.docx
-
XX幼儿园大班上学期班主任工作计划.docx
-
B2C平台商城入驻费用与流程doc.docx
-
常见的操纵财务报表手法.docx
-
东财《中级财务会计》习题.docx
-
GBF蜂巢芯现浇空心楼盖施工方案.docx
-
车刀刃磨.docx
-
安全环保检查制度正式版.docx
-
厨房设计注意事项.docx
-
shb95a型循环水式真空泵参数及特点.docx
-
八年级上册信息技术教案.docx
-
房地产纳税评估案例分析doc.docx
-
XX市政府定点职业培训机构工作要求doc.docx
-
大班半日活动方案 0.docx
-
标准变更确认表.docx
-
凤庆事业编招聘考试真题及答案解析下载版事业单位真题.docx
