 挖掘机工作装置的设计.docx
挖掘机工作装置的设计.docx
- 文档编号:26213355
- 上传时间:2023-06-17
- 格式:DOCX
- 页数:27
- 大小:458.14KB
挖掘机工作装置的设计.docx
《挖掘机工作装置的设计.docx》由会员分享,可在线阅读,更多相关《挖掘机工作装置的设计.docx(27页珍藏版)》请在冰豆网上搜索。
挖掘机工作装置的设计
三、履带式液压挖掘机工作装置设计
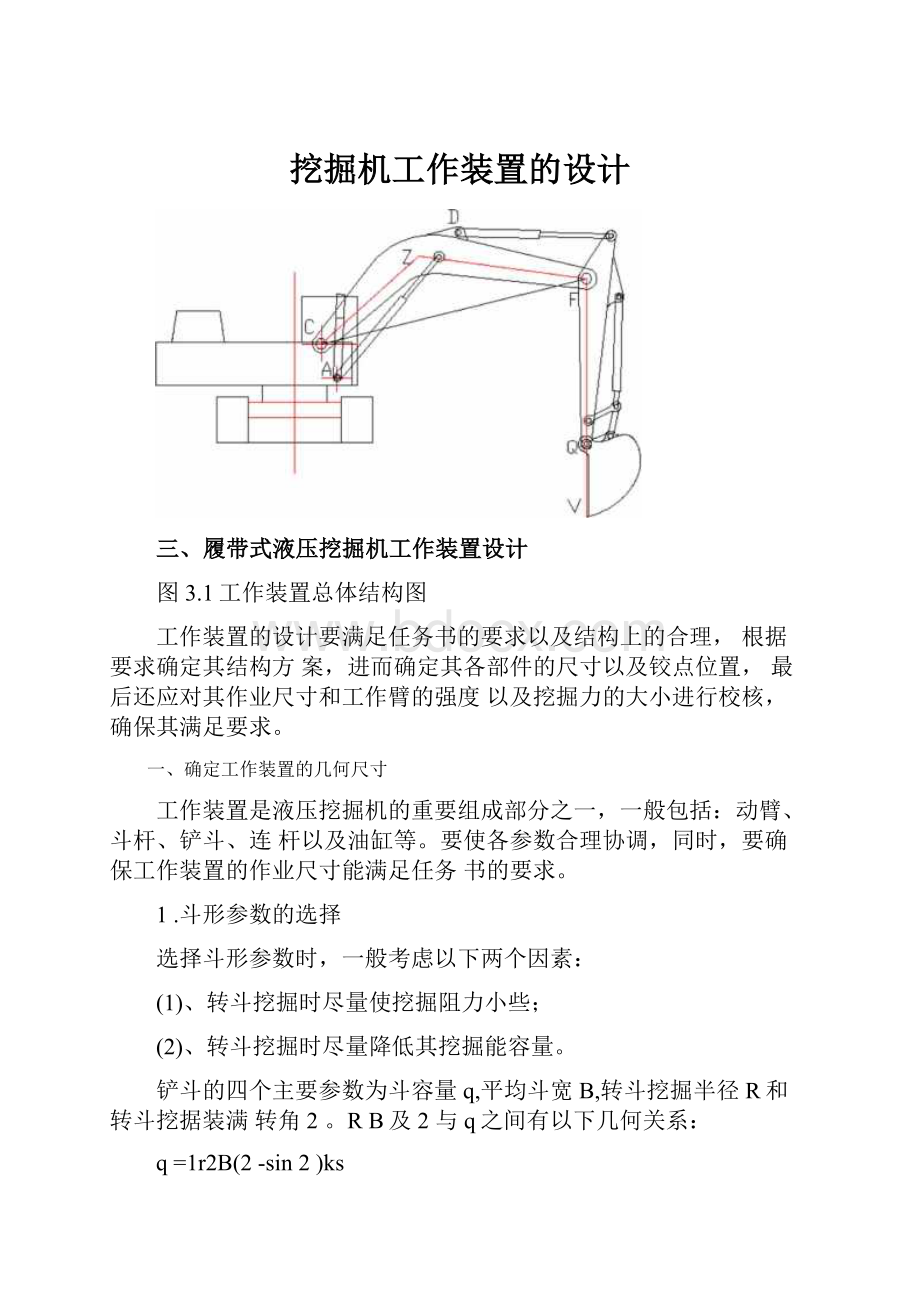
图3.1工作装置总体结构图
工作装置的设计要满足任务书的要求以及结构上的合理,根据要求确定其结构方案,进而确定其各部件的尺寸以及铰点位置,最后还应对其作业尺寸和工作臂的强度以及挖掘力的大小进行校核,确保其满足要求。
一、确定工作装置的几何尺寸
工作装置是液压挖掘机的重要组成部分之一,一般包括:
动臂、斗杆、铲斗、连杆以及油缸等。
要使各参数合理协调,同时,要确保工作装置的作业尺寸能满足任务书的要求。
1.斗形参数的选择
选择斗形参数时,一般考虑以下两个因素:
(1)、转斗挖掘时尽量使挖掘阻力小些;
(2)、转斗挖掘时尽量降低其挖掘能容量。
铲斗的四个主要参数为斗容量q,平均斗宽B,转斗挖掘半径R和转斗挖据装满转角2。
RB及2与q之间有以下几何关系:
q=1r2B(2-sin2)ks
当q—定时最大挖掘阻力W1max及转斗挖掘能容量E随着R的增大而下降。
但B和R大到一定程度,综合反映到2<90。
后,W1max和E下降渐缓,且B的增大,使附加载荷引起的对工作装置的扭矩和水平转矩随之增大全面考虑。
可取2=90°
~100°,若2>100°则W1max太大;若2<90°则B或R太大。
在q三0.25m3时R和B对W1max的影响差不多。
从能量的观点看,不论q如何,B对E的影响远远大于R,设计时应兼顾WJmax和E两方面,希望两者都小些,因此R和B两值不宜相差悬殊。
综合考虑,选取:
2=98°,B=1.25,ks=1.25
依据公式
12qRB(2-sin2)ks
计算确定R=1.33m
2•动臂及油缸铰点的布置
:
11及15取值对挖掘机性能有影响。
15取值过大将使油缸力臂值增大,回转支承受力变大,闭锁力上升,动臂摆角减小,作业范围减小,且使动臂座尺寸变大,给制造和安装带来不便;11的值取的过大,使特性系数ks值增大,提升能力下降。
类比其它样机,一般取15(300〜450mm(小挖);600〜800mm(中挖));经实地测量q=1.05m3的玉柴YC230LC-8相关参数,类比,取15=720;
:
11(65。
左右);所以,经类比及设计需要,取:
11=65°0
A点位置的确定:
XA=D*200mm左右D回转支承外径
~平台离地咼度+150mr左右
类比后取平台离地高度(600~65Omm(小挖);1100~115Omm(中挖));
由D=0.45[22=1261.2mm,查有关资料,目前市场上有回转支承外径D=1244mm的产
品计算,所以,得出:
yA=1100+150=1250mm。
C点位置的确定:
Xc=Xa-15eosin,所以xC=820-720cos65=515yc二yA-sin:
-11,所以yc二1250-sin65二900.6
计算得出XC=515,yC=900。
3.动臂尺寸参数的确定
推荐采用整体式弯动臂,考虑挖深及结构强度,取动臂弯角为广130°,(因为
l1
根据作业要求,:
1一般取130°左右);特性参数k1=丄(1.5--2),取1.65。
112
确定动臂及斗杆l1、12的长度,要满足作业要求。
根据经验公式:
R1T3,得
1心
9800-1400
=3169.8mm
|〔二kJ?
,得h"653169.8=5230.17mm
将计算的11、12圆整,取l1=3170mm;b=5230mm。
由于反铲挖掘机以挖掘深度为主指标,故取特性参数1.3
在厶CZF中(见前图)根据:
-1,l1求:
l42
''39
k3l4得142=1.3X25043=3255.6mm;
-ZFC二arccosl4;a得:
3^21.5;
2l42l1
所以.ZCF=23.5,暂取.BCZ=5.5,所以,BCF二18。
油缸铰点的布置综合考虑了结构件的强度、油缸本身以及安装特性,经作图凑出:
l6=3393mm,l7=3330mm,22600mm,I22=285mm7。
4.斗杆机构的尺寸参数的确定
斗杆机构的设计应满足:
(1)、斗杆机构应满足斗杆转角的要求,摆角应在105°〜125°之间,在满足工作范围等前提下本机取108°;
(2)斗杆油缸全伸时,铲斗任意转动不得碰动臂;
(3)保证足够得挖掘力及必要得闭锁能力。
确定斗杆油缸下铰点:
D点与动臂间得距离应尽量小些,为使动臂与斗杆油缸不发生干涉。
油缸与动臂之间应留有10mn左右得间隙。
斗杆尾部半径l9从闭锁考虑,可按经验公式:
11
|9=()X(I2+I319=(849~1125),取19=950mm;
45.3
斗杆上•EFQ取决于结构因素,并考虑到其作作范围一般在130°〜170。
,
所以,取•EFQ=150°。
斗杆相对于动臂得初始位置不能超过动臂中心延长线,可取其夹角为5°至8°
左右,本设计中取8°。
5.铲斗连杆机构设计:
(1)铲斗连杆机构设计时应满足:
1转角要求
为了满足开挖和最后卸载及运输状态的要求,铲斗的最大转角
3max一般在150°〜180°,本设计中取3max=180°o铲斗在挖掘过程中转角大致为90°〜110°。
铲斗仰角范围一般为0°〜45°。
这样还可以适应挖掘深沟及垂直侧壁得作业要求,不使斗底先于斗齿接触土地。
图3.2铲斗的最大转角
同时,铲斗的转角范围还应该满足,当动臂油缸处于最短即:
Ll=Llmin,斗杆油
缸处于最短即:
L2=-2min,铲斗油缸处于最长即Ls=L3max时,铲斗b与地面的夹角a
<45o。
2挖掘力的变化与阻力变化一致
铲斗机构最大理论挖掘力应与最大挖掘阻力相适应,一般在-10。
开挖,最大挖
掘力出现在25°〜35°处。
3几何相容
连杆机构设计还需要满足几何相容,要保证连杆机构三角形、四边形在油缸得全
行程中任一瞬时斗不被破坏,并且各个构件间不发生干涉碰撞。
根据验算,本设计各项均满足以上要求。
(2)铲斗连杆机构的型式选择
反铲铲斗机构有四连杆的,也有六连杆的,本设计采用四连杆机构。
(3)铲斗连杆机构的参数选择
为满足几何相容条件,由经验公式可计算连杆各构件的尺寸参数。
1
l24二KQ二0.3~0.381313
3
1
得,124=KQ=:
0.3~0.3814001400=466.7mm,类比,取|24=490mm
3
.FQN=00一8°,通过类比本设计中取5°;
.:
.10=95°〜115°,通过类比本设计中取108°;
121=(0.7~0.8)l24=450mm,通过类比本设计取450mm;
129=1.5l24=735mm通过类比本设计取580mm;
通过类比确定l14=600mm。
铲斗油缸在伸缩过程中,由于设计过程中油缸及斗杆间留由10mm左右得间隙,
使两者不发生干涉。
铲斗油缸下铰点位置的确定也通过同类机型类比及作图得:
S=EG=1188mm;
l10=FG=720mm。
6.作业范围和挖掘包络图
由以上计算,动臂和斗杆的基本长度和弯角已经确定,其它各部分未定的具体参
数,参照卡特323DL小松PC220-8三一SY215C-8和玉柴YC230LC-8这四种中型液压挖掘机,对本次设计的挖掘机进行类比做仿形设计,并结合任务书对作业参数(停
机面最大挖掘半径、最大挖掘深度和最大卸载高度)和挖掘力的要求,用AutoCAD
进行建模,对起铰点位置进行优化,得停机面最大挖掘半径为9876mm当CF在水平
面以上并成59°夹角时有最大卸载高度6520mm当CF在水平面以下并成50°夹角时有最大挖掘深度6690mm如下图。
图3.3最大挖掘半径、最大挖掘深度和最大卸载高度示意图
此时,工作装置的基本尺寸和铰点位置已基本确定,各部分的结构尺寸如下:
表3.1
工作装置各机构尺寸参数
铲斗
斗杆
动臂
机体
QV=1400mm
FQ=3170mm
CF=5230mm
CA=730mm
QK=490mm
EF=950mm
CD=3393mm
KH=580mm
FG=720mm
CB=3330mm
HN=600mm
GN=2145mm
DF=2600mm
QN=450mm
BF=2857mm
EG=1188mm
CZ=2505mm
ZF=3255mm
/Z=130o
图3.4挖掘包络图
在确定挖掘机各机构参数后,绘制出本台挖掘机的挖掘包络图,如下:
二、挖掘阻力、油缸作用力、闭锁力挖掘力计算
1.铲斗挖掘阻力
转斗挖掘时,土壤切削阻力随挖掘深度改变而明显变化
W1=C{R[1-
切削阻力的切向分力:
max]}1.35BAZXdCOS(max-
其中C——表示土壤硬度的系数,对III级土宜取C=90~150;取C=120
R――转斗切削半径;R=b=140(厘米);
:
max挖掘过程中铲斗总转角的一半;查资料,取max=110°;
‘一一铲斗的瞬时转角;
B――切削刃宽度影响系数,B=1+2.6b,其中b为铲斗平均宽度,单位
为m;算得B=1+2.6X1.25=4.25;
A――切削角变化影响系数,取A=1.3;
Z――带有斗齿的系数,Z=0.75(无斗齿时,Z=1);有斗齿,取Z=0.75;
X――斗侧壁厚度影响系数,X=1+0.03s,其中s为侧壁厚度,单位为cm,初步设计时可取X=1.15;
D――切削刃挤压土壤的力,根据斗容量大小在10000-17000N范围内选
取。
当斗容量q〈0.5m3时D应小于10000N。
本次设计中取D=12000(由推荐8000N(小挖)12000N(中挖))。
取不同的一组「列表计算铲斗挖掘阻力Wi。
所得数据见表3.2
转斗挖掘装土阻力的切向分力:
=qJcos:
式中——密实状态下土壤容重,单位为N/m3;
挖掘起点和终点间连线ab方向与水平线的夹角;
J――土壤与钢的摩擦系数。
计算表明:
W与W1相比很小,可忽略不计。
当「一max,—0时出现转斗挖掘最大切向分力W,max:
Wmax二C[R(1-COSmaxW^BAZXD
代以上数据算得W1max=154.8KN。
试验表明法向挖掘阻力W2的指向是可变的,数值也较小,一般W2=^0.2W1。
土质愈均匀,W2愈小。
从随机统计的角度看,取法向分力W2为零来简化计算是允许的。
这样W1max就可看作为转斗挖掘的最大阻力。
转斗挖掘的平均阻力可按平均挖掘深度下的阻力计算。
也即把半月形切削断面看
作等面积的的条形断面,条形断面长度等于斗齿转过的圆弧长度与其相应之弦的平均值,平均切削厚度为:
代以上数据算得h=385.7mm;
平均挖掘阻力为:
—R(3.1416江®-90sin2半
Wj=C|5r\bAZX+D
L(3.1416艸+180sin申)j
代以上数据算得W1j=91.2KN;
式中「用角度代入,一般所谓平均阻力是指装满铲斗的全过程阻力平均值,因此
应取=max=55°。
2.斗杆挖掘阻力计算
斗杆挖掘时切削行程较长,切土厚度在挖掘过程中可视为常数。
一般取斗杆在挖掘过程中的总转角为订=50〜80,在转角行程中铲斗被装满。
这时斗齿的实际行程为:
S=0.01745r6\,代数算得S=478.5mm;
式中r6——斗杆挖掘时的切削半径,心二FV。
斗杆挖掘时的切削厚度hg可按下式计算:
h=q_q,代数算得hg=167.2
g_BSKs0.01745r6gB
斗杆挖掘阻力为:
当取川级土壤时,K0=1O,Ks=1.25
式中K。
一一挖掘比阻力,当取主要挖掘土壤的K。
时可求得正常挖掘阻力,
取要求挖掘的最硬土质K0值时则得最大挖掘阻力
W――斗杆挖掘时铲斗转角,该转角主要为避免挖掘时,斗底接触土壤,g
一般:
g=50°〜80°,本设计取1=60°
3.铲斗、斗杆、动臂油缸缸径的确定
液压缸推荐选用工程机械用内卡键式液压缸,动臂、斗杆、铲斗三组油缸均通过
测量同类机型,类比选用(最后选取缸径140mm,杆径86mm)。
4、铲斗、斗杆理论挖掘力计算
(1)反铲装置主要采用斗杆液压缸或铲斗液压缸进行挖掘。
假定不考虑下列因素:
1工作装置自重和土重;
2液压系统和连杆机构的效率;
3工作液压缸的背压;
4不考虑其他因素如停机面坡度、分力、惯性力、动载等因素的影响。
工作液压缸外伸时由该液压缸理论推力所能产生的斗齿切向挖掘力称为工作液压缸的理论挖掘力。
图3.5铲斗理论挖掘力计算示意图
(2)如图所示,铲斗挖掘时铲斗液压缸的理论挖掘力为:
r^r3
Pod二P」3二P3i二f(L3)
「2I3
式中巳一一铲斗液压缸的理论推力,巳二F3・p,f3为铲斗液压杆大腔作用
面积,F3=n(140/2)2=15386mm2;p为液压系统工作压力取p=30MPa;所以P3=462KN
r;、r2、r3――力臂值。
由于铲斗的转角从0°到180°,做出铲斗每转10°的挖掘图(中间部分取5°),测量各力臂值,如下表:
表3.2铲斗理论挖掘力Pod和挖掘阻力W计算结果
角度
r1
r2
rs
r4=l3
Pa(KN)
PoD
W
0°
110
219
239
1400
462
39.6
0:
10°
265
290
289
1400
462
87.1
20.8
20°
374
358
341
1400
462
117.6
100.8
30°
463
422
388
1400
462
140.5
116.7
40°
525
474
430
1400
462
157.2
145.8
50°
566
514
455
1400
462
165.3
153.4
55°
584
532
469
1400
462
169.9
154.8
60°
591
552
478
1400
462
168.9
153.8j
70°
597
562
482
1400
:
462
169.0
145.8:
80°
596
570
489
1400
462
168.7
128.7
90°
588
590
492
1400
462
161.8
100.8
100°
573
599
481
1400
462
151.8
59.6
110°
547
603
464
1400
462
138.9
120°
511
591
439
1400
462
125.3
130°
489
592
412
1400
462
112.3
140°
452
582
379
1400
462
97.1
150°
416
581
347
1400
462
82.0
160°
374
581
314
1400
462
66.7
170°
338
579
282
1400
462
54.3
180°
308
582
252
1400
462
44.0
将铲斗理论挖掘力Pod和挖掘阻力W绘制在同一张坐标纸上,比较两者的大小及变化趋势,如下表:
转斗挖掘力
角度
由上图可看出,铲斗理论挖掘力PoD始终大于挖掘阻力W,并且两者随角度
变化趋势基本一致,同时,Rd与W几乎都在55°时达到最大值(设计的挖掘机从-25。
开挖),符合挖掘要求。
(3)斗杆液压缸的理论挖掘力的计算:
斗杆液压缸的理论挖掘力为:
P0Q胡Sf(L2丄3)
「6
式中F2――斗杆液压缸的理论推力,P2=F2p,其中f2为斗杆液压缸大腔作用
面积,p为液压系统工作压力。
r5,r6――力臂值。
当F、GV三点共线时,r6=r2+r3=r6ma=4570mm同时如果r5=r5min(此时L?
=L2max
或L2二L2min)则可得p°G的最小值。
由下图算得:
即斗杆最小理论挖掘力大于斗杆挖掘阻力,所以斗杆油缸挖掘力满足要求。
图3.6斗杆理论挖掘力示意图
5、动臂油缸作用力计算
动臂油液压缸应保证反铲作业过程中在任何位置上都能提起带有满载铲斗的工作装置到达最高和最远的位置。
可选用三个计算位置:
(1)从最大挖掘深度处提起满载斗;
(2)最大挖掘半径时举起满载斗;
(3)最大卸载高度时提动满载斗。
三大工况如下图所示:
图3.7动臂油液压缸作用力计算示意图
对动臂在转台上的铰点C取矩,可以得到各位置下所需的动臂液压缸作用力:
p=(、6斤Grje
i3
式中Gi――工作装置各构件的重量,初步设计时可通过经验公式法取用;
Gt――斗中土重;
ri和n——各构件及斗内土壤重心到点C的力臂。
(1)、反铲工作装置各部分质量计算
根据国内几种反铲装置的构件近似质量表,经类比法得出以下参数:
表3.4工作装置质量表
项目
斗容量
(m3)
质量(t)
动臂
斗杆
铲斗
斗杆缸
铲斗缸
连杆摇杆
动臂缸
机重
机型1
1.00
1.5
0.8
0.8
0.23
0.13
0.15
0.4
22.6
机型2
1.05
1.5
0.8
0.8
0.23
0.13
0.14
0.4
23
本机型
1
1.5
0.8
0.8
0.22
0.13
0.14
0.38
22.5
(2)、提升力计算(三种工况均由图3.7分析)
工况I:
最大挖深时满斗提升,此时动臂油缸全缩,斗杆垂直地面,铲斗转至水平,这时计土重和工装重。
2Fte二G2r2G3r3G4r4G5r5G6「6
求得Ft,判断是否v动臂缸推力。
工况u:
最大卸载高度满斗提升
2Fte二GdiG2TG3BG4「4G5EG6「6
求得Ft,判断是否v动臂缸推力。
工况川:
最大卸载半径满斗提升
2Fte二G27G3BG4qG5EG6「6
求得Ft,判断是否v动臂缸推力
表3.5三大工况提升力计算数据
工况1
工况2
工况3
r1
2847
2382
690
r2
4000
6535
4360
r3
3480
8160
5845
r4
4075
4085
1800
「5
5535
7085
4790
「6
4145
8560
6230
r7
3260
7740
5400
e
550
652
334
Gi
1500
1500
1500
G2
800
800
800
Gb
800
800
800
G
220
220
220
G5
130
130
130
G6
140
140
140
G
1800
1800
1800
Ft
16653.5
24753.949387
31152.54491
即
16.7KN
24.8KN
31.2KN
均远小于
2X462KN
6、
液压缸闭锁力计算
确定合理的液压缸闭锁能力是保证挖掘力得到充分发挥的基本条件之一。
在挖掘范围内当工作装置处于不同位置时各液压缸所受到的被动作用力值也不同,一般常选定几个反铲作业的主要工况作为计算位置来计算各液压缸应用的闭锁力,使之在该工况下不发生液压缸被动回缩或伸长的现象,从而保证了工作液压缸作用力的发挥。
为确定各液压缸的闭锁压力,选用以下三个计算位置:
在主要挖掘区内对以下几种工况的油缸闭锁力进行校核(三种工况均作图分析)。
工况I:
动臂最低,斗杆垂直于地面,铲斗挖掘最大,并且作用力臂最大。
图3.8液压缸闭锁力校核工况I
动臂缸小腔闭锁
7
s2pbieG"二Wi「9W2「8
i=2
由工况I下的W1、W2=0.1W1,求得pbl,判断是否V油缸的闭锁压力,判断该工况下动臂油缸是否闭锁。
对F点取矩计算斗杆油缸闭锁压力,斗杆油缸大腔闭锁。
计算Pb2,判断是否V油缸的闭锁压力,判断该工况下斗杆油缸是否闭锁。
工况U:
动臂油缸最低,斗杆与动臂的铰点F,斗与斗杆铰点Q,斗齿尖V点三
点共线,斗杆挖掘,其作用力臂为最大。
图3.9液压缸闭锁力校核工况n
动臂油缸小腔闭锁
7
s2Pbie'Giri二Wi“W2“
i=2
由工况u下的W1、W2=0.1,
求得pb1,判断是否v油缸的闭锁压力。
对Q点取矩可计算铲斗油缸闭锁压力,铲斗油缸大腔闭锁。
计算Pb3,判断是否V油缸的闭锁压力,判断该工况下动臂油缸是否闭锁。
工况川:
动臂处于最低位置,挖掘深度为最大,FQV三点共线,铲斗挖掘,并
要求能克服平均挖掘阻力。
图3.10液压缸闭锁力校核工况川
动臂小腔闭锁
由工况川下的W1、W2=0.1W1,
动臂缸小腔闭锁
兀227
2—D-dpb1e*GiriW1r9W2r8
4y
计算得pb1,判断该工况下动臂油缸是否闭锁。
对F点取矩可计算斗杆油缸闭锁能力,油缸大腔闭锁。
计算pb2,判断是否V油缸的闭锁压力,判断该工况下斗杆油缸是否闭锁。
在液压缸上述三大工况下分别测量力臂值并记录,填入Excel中,处理数据如下
表:
表3.6液压缸闭锁力校核三工况数据表
■――
工况1
工况2
工况3
e1
650
650
650
e2
758
950
758
ri
600
600
600
「2
575
467
475
r3
490
490
490
r4
1400
1400
1400
r5
3567
1649
3358
r6
3485
3493
3503
「7
4115
4570
3353
「8
1637
0
0
r10
3358
1872
3821
r11
3353
0
3353
r13
2332
2332
2332
r14
6579
4993
3343
r18
5836
6161
8589
W1
148347.57764
198328.74885
185064.06015
P'


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 挖掘机 工作 装置 设计
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《爱和自由》读书心得15篇.docx
《爱和自由》读书心得15篇.docx
-
《极致服务》读后感.docx
-
《上海市饮用水水源保护条例》.docx
-
《变化社会中的政治秩序》读后感.docx
-
《吵闹村的孩子》读后感15篇.docx
-
《摆渡人》读后感受1000字左右范文.docx
-
《国际贸易学》题库南京大学.docx
-
《诚信备考》主题班会活动.docx
-
《高等学校教师职业道德修养》考试要点演示教学.docx
-
《巴菲特的护城河》精华摘要.docx
-
《繁星春水》读后感14篇.docx
-
#电控发动机的故障诊断与排除.docx
-
《归去来兮辞》优化教案及课文解析.docx
-
《办公室秘书个人党性分析材料》.docx
-
《会飞的气球》大班教案.docx
-
#生命生活与安全5上.docx
-
《城南旧事》的读后感作文范文10篇.docx
-
《标志用公共信息图形符号 第1部分通用符号》GBT 100011.docx
-
《初级会计实务》考试试题及答案解析.docx
-
《公共基础知识》考点《公文写作与处理》.docx
-
《海底世界》大班教案.docx
-
#ds18b20可调温度控制器.docx
-
《爱的教育》读书笔记范文10篇.docx
-
《公路养护工程量清单及计量规范》编制.docx
-
《建设工程监理规范》新旧版本区别.docx
-
《生活补助申请报告》.docx
-
《纸质档案管理规范》word版.docx
-
00种英语游戏.docx
-
09多元实用才能2.docx
-
《财经法规与会计职业道德》全真模拟试题及参考答案四.docx
-
14秋学前教育教育理论期中考试试题.docx
-
《大数据导论》19秋期末考核0001.docx
-
我的工艺学论文.docx
-
全国普通高等学校招生统一考试全国II英语附答案.docx
-
新时代的劳动者导学案高一政治AKwlUU.docx
-
时间的记忆作文800字.docx
-
六年级英语下册各单元知识点总结归纳.docx
-
药物单次给药毒性指导原则征求意见稿.docx
-
最新幼儿园中班下学期教师个人工作计划精选多篇.docx
-
小学教师一年级教育教学工作总结共4篇.docx
-
幼儿园实习心得1000字.docx
-
效果图制作合同范本.docx
-
元旦晚会主持人主持词.docx
-
人大企管考研专业课真题汇总.docx
-
企业资源计划ERP实验报告.docx
-
人教版四年级上册数学第五单元教案.docx
-
年产5000平方塑钢门窗生产线项目建设可行性研究报告.docx
-
选煤厂浓缩车间工程施工组织设计.docx
-
人教版 新目标七年级下unit10全单元电子教案 2.docx
-
消防安全组织机构及职责.docx
-
《红高粱》电影观后感最新5篇.docx
