 机电控制作业matlab仿真速度环仿真实验汇总.docx
机电控制作业matlab仿真速度环仿真实验汇总.docx
- 文档编号:26152348
- 上传时间:2023-06-17
- 格式:DOCX
- 页数:17
- 大小:580.31KB
机电控制作业matlab仿真速度环仿真实验汇总.docx
《机电控制作业matlab仿真速度环仿真实验汇总.docx》由会员分享,可在线阅读,更多相关《机电控制作业matlab仿真速度环仿真实验汇总.docx(17页珍藏版)》请在冰豆网上搜索。
机电控制作业matlab仿真速度环仿真实验汇总
机电系统控制技术
matlab仿真——速度环仿真实验
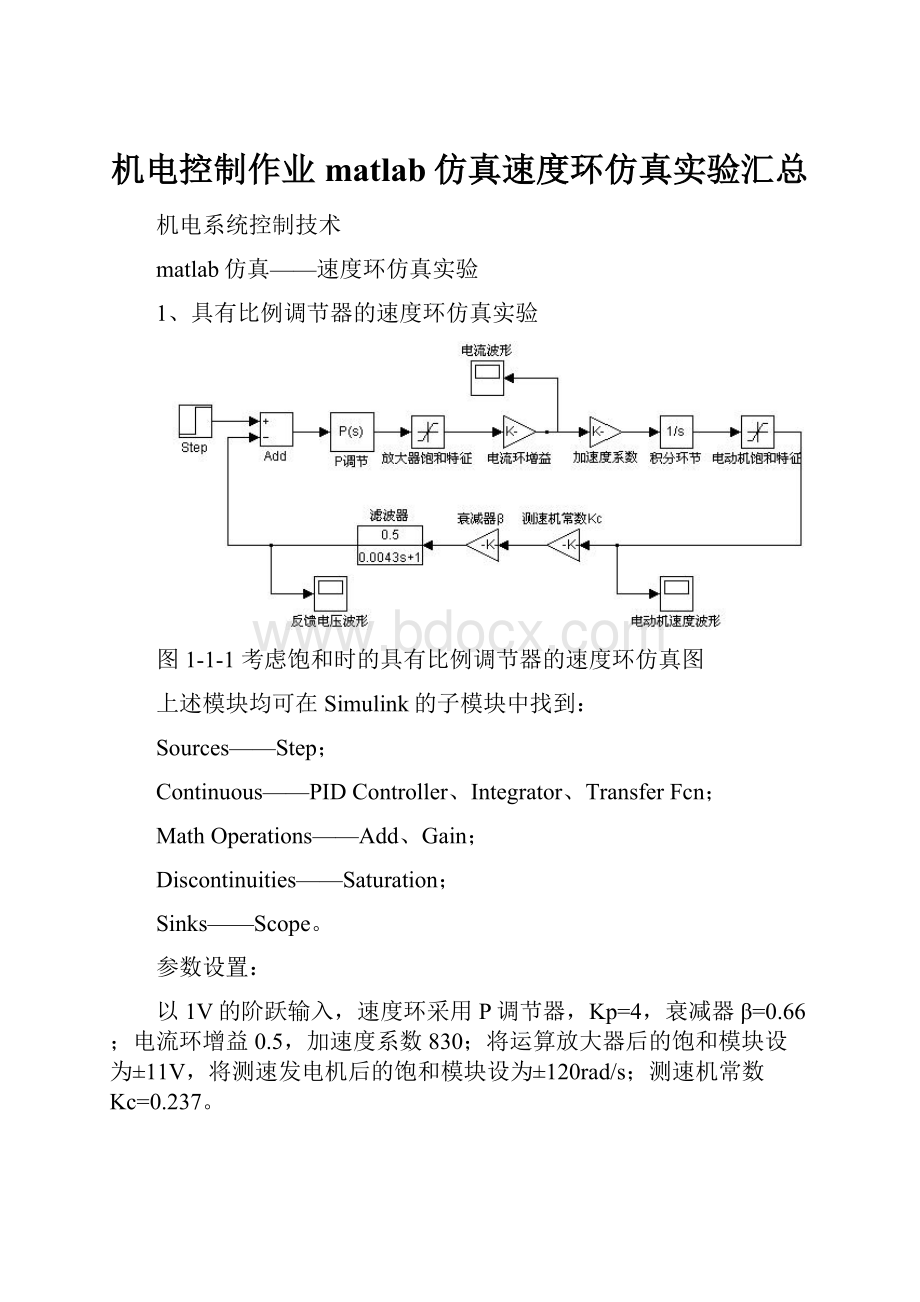
1、具有比例调节器的速度环仿真实验
图1-1-1考虑饱和时的具有比例调节器的速度环仿真图
上述模块均可在Simulink的子模块中找到:
Sources——Step;
Continuous——PIDController、Integrator、TransferFcn;
MathOperations——Add、Gain;
Discontinuities——Saturation;
Sinks——Scope。
参数设置:
以1V的阶跃输入,速度环采用P调节器,Kp=4,衰减器β=0.66;电流环增益0.5,加速度系数830;将运算放大器后的饱和模块设为±11V,将测速发电机后的饱和模块设为±120rad/s;测速机常数Kc=0.237。
图1-1-3速度环比例调节器的增益
图1-1-2输入阶跃参数
图1-1-4滤波器中传递函数参数设置
运行仿真,可得反馈电压信号的时域响应曲线(如图1-1-5)、电动机电流的时域响应曲线(如图1-1-6)、电动机转速的时域响应曲线(如图1-1-7)。
图1-1-5反馈电压信号的时域响应曲线图1-1-6电动机电流的时域响应曲线
图1-1-7电动机转速的时域响应曲线
为了求得系统的闭环带宽,下面利用feedback函数求出闭环传递函数,其中sys1和sys2分别为前向通道和反馈回路的传递函数。
编写如下程序进行计算:
b=0.5;
Kp=4;
num1=Kp*b*830;
den1=[1,0];
sys1=tf(num1,den1);
num2=0.237*0.66*0.5;
den2=[0.0043,1];
sys2=tf(num2,den2);
sys=feedback(sys1,sys2);
bode(sys)
grid
绘出调速系统闭环的伯德图,如图1-1-8所示。
图1-1-8调速系统闭环的伯德图
在伯德图上放大后可以看到系统闭环频宽200rad/s,折合约30Hz。
2、具有比例积分调节器的速度环仿真实验
图1-2-1考虑饱和时的具有PI调节器的速度环仿真图
可选择不同的PI调节器参数,如、、、。
2.1PI调节器参数选择时
其余参数不变,PI调节器的参数设置如图1-2-2所示。
图1-2-2
运行仿真,可得反馈电压信号的时域响应曲线(如图1-2-3)、电动机电流的时域响应曲线(如图1-2-4)、电动机转速的时域响应曲线(如图1-2-5)。
图1-2-3反馈电压信号的时域响应曲线图1-2-4电动机电流的时域响应曲线
图1-2-5电动机转速的时域响应曲线
为了求得系统的闭环带宽,下面利用feedback函数求出闭环传递函数,其中sys1和sys2分别为前向通道和反馈回路的传递函数。
编写如下程序进行计算:
num1=[22.825,415];‘
den1=[0.004,0,0];
sys1=tf(num1,den1);
num2=0.237*0.66*0.5;
den2=[0.0043,1];
sys2=tf(num2,den2);
sys=feedback(sys1,sys2);
bode(sys)
grid
绘出调速系统闭环的伯德图,如图1-2-6所示。
图1-2-6调速系统闭环的伯德图
2.2PI调节器参数选择时
其余参数不变,PI调节器的参数设置如图1-2-7所示。
图1-2-7
运行仿真,可得反馈电压信号的时域响应曲线(如图1-2-8)、电动机电流的时域响应曲线(如图1-2-9)、电动机转速的时域响应曲线(如图1-2-10)。
图1-2-8反馈电压信号的时域响应曲线图1-2-9电动机电流的时域响应曲线
图1-2-10电动机转速的时域响应曲线
为了求得系统的闭环带宽,下面利用feedback函数求出闭环传递函数,其中sys1和sys2分别为前向通道和反馈回路的传递函数。
编写如下程序进行计算:
num1=[4.15,415];‘
den1=[0.004,0,0];
sys1=tf(num1,den1);
num2=0.237*0.66*0.5;
den2=[0.0043,1];
sys2=tf(num2,den2);
sys=feedback(sys1,sys2);
bode(sys)
grid
绘出调速系统闭环的伯德图,如图1-2-11所示。
图1-2-11调速系统闭环的伯德图
2.3PI调节器参数选择时
其余参数不变,PI调节器的参数设置如图1-2-12所示。
图1-2-12
运行仿真,可得反馈电压信号的时域响应曲线(如图1-2-13)、电动机电流的时域响应曲线(如图1-2-14)、电动机转速的时域响应曲线(如图1-2-15)。
图1-2-13反馈电压信号的时域响应曲线图1-2-14电动机电流的时域响应曲线
图1-2-15电动机转速的时域响应曲线
为了求得系统的闭环带宽,下面利用feedback函数求出闭环传递函数,其中sys1和sys2分别为前向通道和反馈回路的传递函数。
编写如下程序进行计算:
num1=[106.24,415];‘
den1=[0.018,0,0];
sys1=tf(num1,den1);
num2=0.237*0.66*0.5;
den2=[0.0043,1];
sys2=tf(num2,den2);
sys=feedback(sys1,sys2);
bode(sys)
grid
绘出调速系统闭环的伯德图,
如图1-2-16所示。
图1-2-16
2.4PI调节器参数选择时
其余参数不变,PI调节器的参数设置如图1-2-17所示。
图1-2-17
运行仿真,可得反馈电压信号的时域响应曲线(如图1-2-18)、电动机电流的时域响应曲线(如图1-2-19)、电动机转速的时域响应曲线(如图1-2-20)。
图1-2-18反馈电压信号的时域响应曲线图1-2-19电动机电流的时域响应曲线
图1-2-20电动机转速的时域响应曲线
为了求得系统的闭环带宽,下面利用feedback函数求出闭环传递函数,其中sys1和sys2分别为前向通道和反馈回路的传递函数。
编写如下程序进行计算:
num1=[19.505,415];‘
den1=[0.018,0,0];
sys1=tf(num1,den1);
num2=0.237*0.66*0.5;
den2=[0.0043,1];
sys2=tf(num2,den2);
sys=feedback(sys1,sys2);
bode(sys)
grid
绘出调速系统闭环的伯德图,如图1-2-21所示。
图1-2-21


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 机电 控制 作业 matlab 仿真 速度 实验 汇总
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《爱和自由》读书心得15篇.docx
《爱和自由》读书心得15篇.docx
-
《极致服务》读后感.docx
-
《上海市饮用水水源保护条例》.docx
-
《变化社会中的政治秩序》读后感.docx
-
《吵闹村的孩子》读后感15篇.docx
-
《摆渡人》读后感受1000字左右范文.docx
-
《国际贸易学》题库南京大学.docx
-
《诚信备考》主题班会活动.docx
-
《高等学校教师职业道德修养》考试要点演示教学.docx
-
《巴菲特的护城河》精华摘要.docx
-
《繁星春水》读后感14篇.docx
-
#电控发动机的故障诊断与排除.docx
-
《归去来兮辞》优化教案及课文解析.docx
-
《办公室秘书个人党性分析材料》.docx
-
《会飞的气球》大班教案.docx
-
#生命生活与安全5上.docx
-
《城南旧事》的读后感作文范文10篇.docx
-
《标志用公共信息图形符号 第1部分通用符号》GBT 100011.docx
-
《初级会计实务》考试试题及答案解析.docx
-
《公共基础知识》考点《公文写作与处理》.docx
-
《海底世界》大班教案.docx
-
#ds18b20可调温度控制器.docx
-
《爱的教育》读书笔记范文10篇.docx
-
《公路养护工程量清单及计量规范》编制.docx
-
《建设工程监理规范》新旧版本区别.docx
-
《生活补助申请报告》.docx
-
《纸质档案管理规范》word版.docx
-
00种英语游戏.docx
-
09多元实用才能2.docx
-
《财经法规与会计职业道德》全真模拟试题及参考答案四.docx
-
14秋学前教育教育理论期中考试试题.docx
-
《大数据导论》19秋期末考核0001.docx
-
110岁孩子的最好陪伴方法分析.docx
-
20以内的进位加法65432加几教案.docx
-
第7课 唯物辩证法的联系观.docx
-
从自律走向法律美国期货市场监管160年管窥.docx
-
太阳能光伏发电系统工程实训实.docx
-
《《孔雀东南飞》》导学案.docx
-
三年级数学下册脱式计算120.docx
-
怎么样才能点好令客人和酒店都满意的菜解读.docx
-
外资争食中国金融肥肉1.docx
-
再就业工作经验交流及对策建议篇一.docx
-
三级肿瘤医院评审标准版.docx
-
上半年教师资格统考化学学科知识与教学能力初中真题.docx
-
完整word版幼儿园科学教育专题 试题答案word文档良心出品.docx
-
医疗器械法律法规考试题与答案.docx
-
部编八年级语文下册12《诗经二首蒹葭》知识一览表.docx
-
产品区域代理合同模板3篇.docx
-
人教版五年级数学上册第一单元小数乘法教案及课后反思.docx
-
Windows 一机多站点的建立方法.docx
-
写字楼合同样本.docx
