 哈工大机械原理大作业任务书连杆机构参考模板.docx
哈工大机械原理大作业任务书连杆机构参考模板.docx
- 文档编号:26046488
- 上传时间:2023-06-17
- 格式:DOCX
- 页数:14
- 大小:99.87KB
哈工大机械原理大作业任务书连杆机构参考模板.docx
《哈工大机械原理大作业任务书连杆机构参考模板.docx》由会员分享,可在线阅读,更多相关《哈工大机械原理大作业任务书连杆机构参考模板.docx(14页珍藏版)》请在冰豆网上搜索。
哈工大机械原理大作业任务书连杆机构参考模板
连杆机构设计
1设计题目
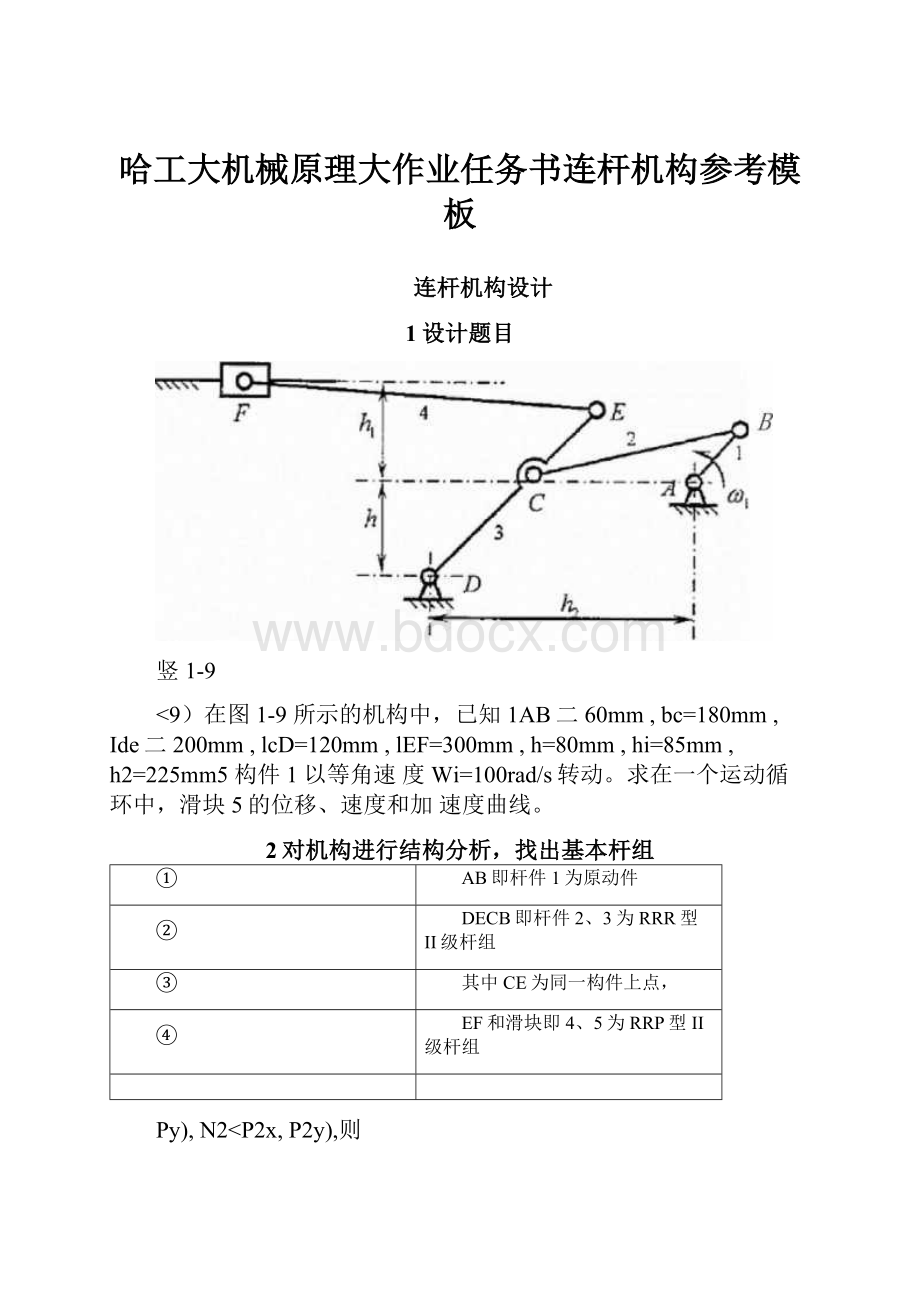
竖1-9
<9)在图1-9所示的机构中,已知1AB二60mm,bc=180mm,Ide二200mm,lcD=120mm,lEF=300mm,h=80mm,hi=85mm,h2=225mm5构件1以等角速度Wi=100rad/s转动。
求在一个运动循环中,滑块5的位移、速度和加速度曲线。
2对机构进行结构分析,找出基本杆组
①
AB即杆件1为原动件
②
DECB即杆件2、3为RRR型II级杆组
③
其中CE为同一构件上点,
④
EF和滑块即4、5为RRP型II级杆组
Py),N2 &都是 呛的情况。 在这两种情况下实际上不可能形成RRR杆组,计算过程中应及时验算上述 3各基本杆组的运动分析数学模型 2RRR杆组运动分析的数学模型 1.位置分析 设两个构件长度1氏及外运动副汇■的位置已知,求两个构件的位置角色及内运动副■的位置。 选定坐标系及相应的标号如下图,构件的位置角R约定从响应构件的外运动副 引X轴的方向线,按逆时针量取。 设外运动副注N2的位置坐标分别为"〈Rx, 1 22 d-[(Px-Ex)2/,Py~P2y)sfcos: 二(d2R2R;)/(2Rd)Cretan((P2y-Py)/(Bx-Px)哥心 内运动副■点坐标为: P3x二Px+Rcosq P3y=Ry+RSlnQ 构件・的位置角: arctan[(F3y-By)/(忠-bx)]位置分析过程中应注意两个问题: 〈1)因为注“2的位置及杆长R1给定的,这就可能出现d>Ri+民或 条件,如 满足上述条件应中止运算并给出相应信息。 〈2)在给定N2,&的条件下,復可能有两个位置如上图中的皑和%相应的弓二'*和弓二我们称为杆组的两种工作状态。 对于实际构件而言,杆组只可能在一种工作状态下运动,而且在机构运动过程中只要不岀现-R-尺的情况〈这种情况下,机构处于瞬时运动不确定状态,设计时应避免)杆组就不会从一种工作状态变为另一种工作状态,所以运动分析时可预先按机构的实际工作位置,指明杆组是哪一种工作状态。 约定状态参数M: 叫怡弘为逆时针读取时M二1,叫2“'为顺时钟时M二 _1O 2.速度分析 设外运动副",点的速度皿,⑴及V笃册已知,求^点的速度、乐, 咖及构件K1,K2的角速度11To因为P3x齐RCOSI=R2COS“2 Ry二Py+Rsinq二F2y+&sin^2 将上式对时间t微分: V3x二比乂~Risin齐二V2x_&「2sinJ2 V3y—.MyRacos冃—.V2yR2,2COSJ2注思到: RiCOSI=Ex-Pix,R1Sin4=Ey—Py〈 贝|J・1二一[(、2x-vlx)(Rx-Bx)(V2y-£)(By-P2y)]/ 国2二-|XV2y—灯)(Ry一Ry)+(V2x-vlx)(? 3x一Rx" PBy-Py) (By- -P2y) ◎ 1(? 3x—卩lx) 4P3x -P2x)> 5一 R2COS*? =Ex 可写为 Q二(By-Ry)( P>x,\Sin02=9-P2y式〈1) 》2y-Vly_ 令: 将J,' Bx-巳x)-(Py-P2y)(? 3x~P '2值代入式VI)即可求得V3x,V3y 3.加速度分析 设外运动副",N2点的加速度皿心皿,a2y已知,求Ns点的加速度宓,a3y,及构 件乩,的角加速度% 将式(1>对时间t微分得: *-(Ry-Py)(Ry-By)严i1二EaI 1(P3x-Plx)-(P3x-Px)J E 式中.a=a2x"alx(A3y-My)'" Eb一a2v-Sly一(V3x一Vlx)1 [名2-]Eu_ 〃(V八 3y"v2y2 (V3x-V2x)2 「一[Ea(Bx—Bx)Eb(F3y-By)]/Q 客2二-[Ea(FSx-Rx)+Eb(F3y-Ry)]/Q 内运动副'3点的加速度丁可由微分式VI)求得。 3平面运动构件V单杆)的运动分析 已知构件K上的N】点的位置",匕速度为Vlx,V1Y,加速度为山,辿及过点的点的线段的位置角二,构件的角速度3,角加速度&,求构件上点役和任意指定点、3<位置参数N°3二&,-“2叫“3二)的位置、速度、加速度。 N1,N3点的位置为: 忠二Rx+Rcos口 P2y=Ry+Rsin口 R3x二Rx十R2COS(口十 T) Ni弐点的速度,加速度为: V2x=Vix-R佃sino=Vix-叭Ey-Ry) V2y=Viy_Ri国sin8=My_co(F2x_Rx) V3x%-Rsin(8+Y)二见-aQy-Ry) V3y=%-R2C0COS®+? )-知-国傀-Rx)&2x=Cx-一 Ry)一国%x_Rx) 2 a2y=*iy十E(Rx—Rx)—国(By—Ry) 2 a(R 3x=4x-(By-Ry)3x-Rx) a 3y 4 N3 n2 RRP杆组运动分析的数学模型 1.位置分析 设已知外运动副点"及移动副导路上任意一选定参考点"的位置,构件°的长度氏及导路的位置角-,求构件&的位置角円及内运动副'3点的位置〈如右图)。 : 角从水平线到 N2N3 度量 ii|-arctanf(Ry-氐)/(Rx-氐)] nn\/-/【—、 由“向导路作垂线,垂足为A,令⑴二 xN u,2A=e,sA=贝lj e二dcos(_-)> u二dsin(--) 221 f=(R2-u2)2 稻点相对于导路上参考点立的滑移距离: 显然,当Rz时无解。 01 A 0 NiN2Ns 当RJ时有两个解,对应于杆组的不同位置状态。 若/ R—fNN2N3&f 八,约定状态参数M二1;若/! >2,则金二-,则约定状态 参数M二T。 内运动副N3的位置坐标: P3x=P2xR2COS,Ry二F2yRzSin一: 构件■的位置角: q二arctan[(P3y-Ry)/(Rx~Rx)] 2.速度分析 N;恥点的速度为Vlx,Vly及叮y已知,导路的角速度,: ,求构件Ki的角速度1点的速度%乂,册及■点相对于导路上重合点的相对速度构件% R3x=px+Rcosq二P2X+R2cosp 珀二Ry+Rsinq=R2y+&sinp <2) 上式对时间t微分,町解出: 3=,尸(―EvSin: FvCOS: )/Q R2=%2-TEv(R3x_Rx)+Fv(P3y—Ry)]/Q 式中: Ev=V2x~Vixrsin1 Fv=V2y-Wy-一cos: Q=(F3y_Py)sinP+(F3x_Px)cosP '3点的速度为: V3x=Vix一Riisinl J V3y严yRicosq 3.加速度分析 Ni,役点的加速度心曲如妙及移动副导路的角加速度Y已知,求构件的角加速度*点的加速度恣“和,及■点相对于移动副导路上重合点的相对角速度行? 0 对式〈2)进行两次微分可得: “=(~Easin一: FacosJ/Q a[2-—(EaQX~*Px)+Fa(F3y-Ry))/Q 式中: Ea=a2x-QxWi2(P3x-Px)-晞R2COSP-2沖Vr2Sinp-邛(Pjy-F2y) Fa二82y_&iy+J(P3y_Py)_(4);R2SinP+2⑷輕边COsP_g0(P3x_Bx) Q=(F3y_Ry)sin0+(F3x_Px)cosP N3点的加速度: 2 a3x=a! x-RiTcos哥~kR“siny 2 &3y=qy—Rc"sind+R岛cosq 4建立坐标系,程序设计及画图 以D点为坐标原点,自然方向为坐标xy轴 〈1)滑块5的位移曲线〈使用matlab编程画图,详见附录1) 〈2)滑块5的速度曲线〈使用matlab编程画图,详见附录2) 〈3)滑块5的加速度曲线〈使用matlab编程画图,详见附录3) 附 录 附录1 t二0: 0.0002.*pi: 0.04.*pi。 xd二225+60.*cos(100.*t〉。 yd二80+60.*sin(100.*t>。 A0二2.*120.*xdoBO二2.*120.*yd。 CO二120.A2+xd.A2+yd.A2-180.A2。 ai=2.*atan((BO+sqrt(AO.A2+B0A2- C0A2»./(AO+CO»xe二200.*cos(ai>。 ye二200.*sin(ai>。 xf二xe-sqrt(300.A2-(165~ye>.A2>。 plot(t,xf> 附录2 t二0: 0.0002.*pi: 0.04.*pi。 xd二225+60.*cos(100.*t〉。 vd=80+60.*sin(100.*t>。 A0二2.*120.*xdoB0二2.*120.*yd。 CO二120.A2+xd.A2+vd.A2-180.A2。 ai二2.*atan((B0+sqrt(A0.A2+B0.A2- CO.A2»./(A0+C0»xe二200.*cos(ai>。 ye二200.*sin(ai>。 xf=xe~sqrt(300.A2-(165~ye>.A2>。 vf二diff(xf>o t二0: 0.0002.*pi: (0.04-0.0002>.*pi。 plot(t,vf>o 附录3 t二0: 0.0002.*pi: 0.04.*pi。 xd二225+60.*cos(100.*t〉。 yd二80+60.*sin(100.*t>。 A0二2.*120.*xdoB0二2.*120.*yd。 CO二120.A2+xd.A2+vd.A2T80.A2。 ai二2.*atan((BO+sqrt(A0.A2+B0.A2~ C0.A2»./(A0+C0»xe二200.*cos(ai>。 ye二200.*sin(ai>。 xf二xe-sqrt(300.A2-(165-ye>・A2>af=diff(diff(xf>>。 t二0: 0.0002.*pi: (0.04-0.0004>.*piplot(t,af>


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 哈工大 机械 原理 作业 任务书 连杆机构 参考 模板
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《初级会计实务》试题题库大全及答案详解.docx
《初级会计实务》试题题库大全及答案详解.docx
-
《管理学》习题教材15章.docx
-
《教育学》读后感范文精选6篇.docx
-
《林教头风雪山神庙》练习题.docx
-
《企业文化》期末复习应考指南央专.docx
-
《数据结构》知识题汇编09第九章排序试题.docx
-
《偷影子的人》读后感集合15篇.docx
-
《幼儿园工作规程》.docx
-
《残疾人证》管理办法.docx
-
《故事》教学反思.docx
-
《Java语言学习知识程序设计》复习资料汇编.docx
-
《短文两篇》课堂实录.docx
-
《基于MATLAB的信号与系统实验指导》编程练习试题doc.docx
-
《昆虫记》好词好句大全.docx
-
《木棉树》阅读答案.docx
-
《区间信号自动控制》练习册答案.docx
-
《山东省中小学教师职称评审表》高级教师一级教师二级教师专用A4纸正反面打印按页码装订许知忠.docx
-
《安娜卡列尼娜》读后感.docx
-
《繁星春水》读后感15篇.docx
-
《苏州市市级示范物业管理项目服务质量评价标准》 doc.docx
-
《采薇》教案.docx
-
《假如给我三天光明》阅读测试题有答案.docx
-
《小学数学教师》读书笔记精选多篇.docx
-
《给幼儿教师的一把钥匙》读书笔记.docx
-
《劳动法》教案设计.docx
-
《综合基础知识》必看考点《刑法》含答案.docx
-
《建筑构造》考试试题及答案精华.docx
-
3套打包北师大版四年级下册英语期末单元测试题解析版.docx
-
《雷锋的微笑》观后感.docx
-
《女人故事》电视栏目策划方案1.docx
-
7万多车对比分解.docx
-
《调皮的日子》题库.docx
-
计算机二级考试题库下载Word文档格式.docx
-
抗菌药和抗真菌药Word格式文档下载.docx
-
黄海实习报告Word下载.docx
-
基于单片机数字调音功放设计Word格式文档下载.docx
-
计算机四级操作系统真题及解析3Word文档格式.docx
-
激励教育学生自信心培养论文Word文档下载推荐.docx
-
技能比赛闭幕式领导致辞5篇Word文件下载.docx
-
京东供应链管理案例报告1Word下载.docx
-
家教故事作文800字Word文件下载.docx
-
考研英语7000词汇已做笔记1Word格式文档下载.docx
-
软件著作权说明书修订文档格式.docx
-
家禽生产学产蛋鸡地饲养管理系统讲义课件Word格式.docx
-
空调清洗合作合同范本标准版Word文档下载推荐.docx
-
篮球兴趣小组活动总结10篇文档格式.docx
-
家政服务员中级考试Word下载.docx
-
历代对联一百副Word格式.docx
-
简报头格式Word文档格式.docx
-
铝合金百叶窗施工方案文档格式.docx
-
零到三岁婴幼儿保育与教育作业答案Word格式.docx
