 结构动力学大作业docx.docx
结构动力学大作业docx.docx
- 文档编号:25972027
- 上传时间:2023-06-16
- 格式:DOCX
- 页数:15
- 大小:315.37KB
结构动力学大作业docx.docx
《结构动力学大作业docx.docx》由会员分享,可在线阅读,更多相关《结构动力学大作业docx.docx(15页珍藏版)》请在冰豆网上搜索。
结构动力学大作业docx
结构动力学作业
姓名:
学号:
1.力插值法
力插值法对结构的外荷载进行插值,分为分段常数插值法和分段线性插值法,这两种方法均适用于线性结构的动力反应计算。
1.1分段常数插值法
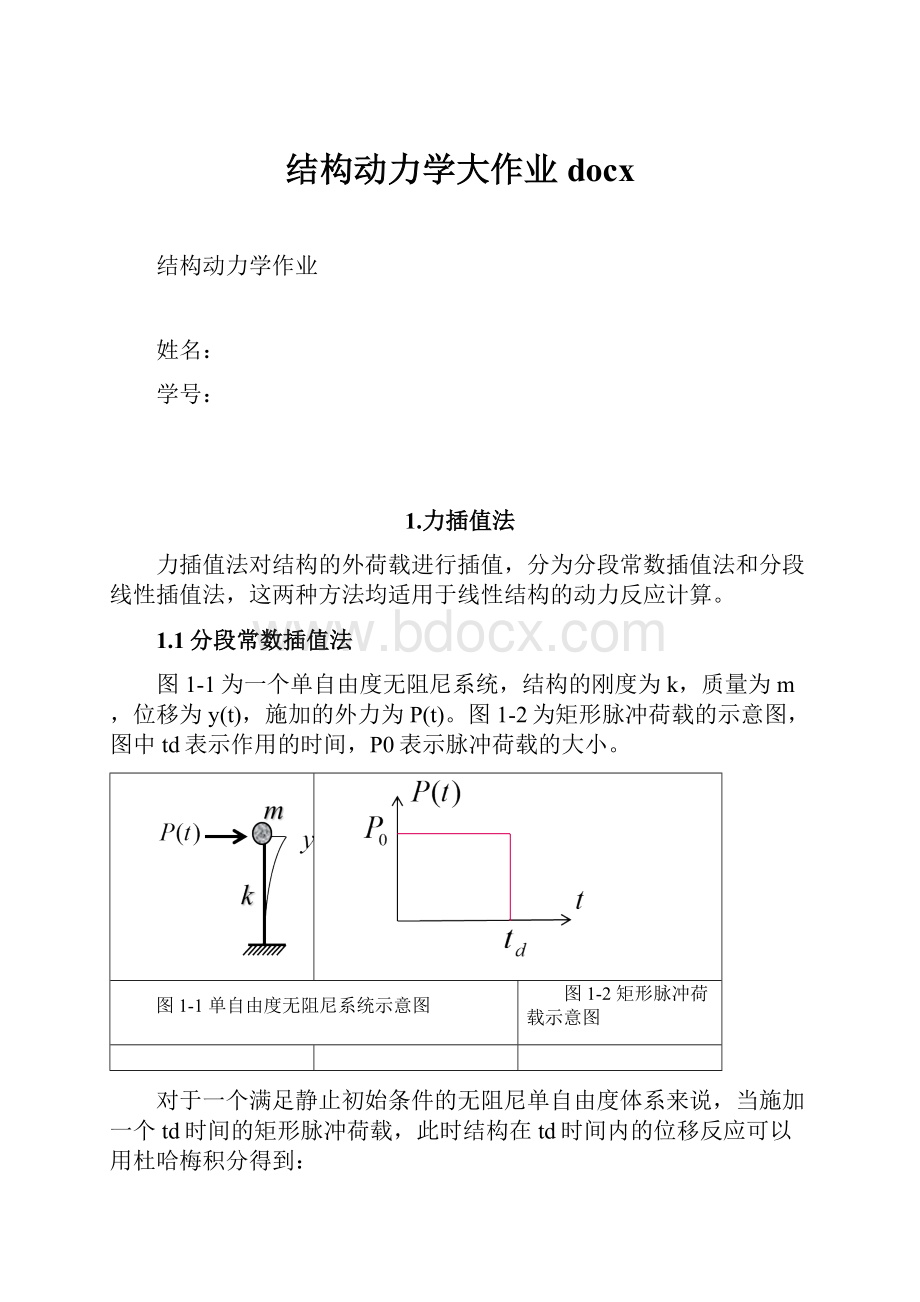
图1-1为一个单自由度无阻尼系统,结构的刚度为k,质量为m,位移为y(t),施加的外力为P(t)。
图1-2为矩形脉冲荷载的示意图,图中td表示作用的时间,P0表示脉冲荷载的大小。
图1-1单自由度无阻尼系统示意图
图1-2矩形脉冲荷载示意图
对于一个满足静止初始条件的无阻尼单自由度体系来说,当施加一个td时间的矩形脉冲荷载,此时结构在td时间内的位移反应可以用杜哈梅积分得到:
(1-1)
如果结构本身有初始的位移和速度,那么叠加上结构自由振动的部分,结构的位移反应为:
(1-2)
图1-3分段常数插值法微段示意图
对于施加于结构任意大小的力,将其划分为Δt的微段,每一段的荷载都为一个常数(每段相当于一个矩形的脉冲荷载),如图1-3所示,则将每一段的位移和速度写成增量的形式为:
(1-3)
(1-4)
程序流程图如下
图1-4分段常数插值法流程图
根据流程图可以编写相应的算法,利用MATLAB进行编程,程序源代码见附录。
为了验证程序的正确性,本文选取的以下的例题进行验证。
对于一个单自由度的无阻尼结构,当其受到一个周期荷载时,其结构响应分为稳态解和瞬态解,由于没有阻尼的影响,其瞬态解并不会衰减,其理论表达式为:
(1-5)
式中,
为位移响应,
为激励,
为刚度,
为荷载频率与固有振动频率之比,
为荷载频率,
为结构固有频率。
现令
为1,
为1,则
为1,
取为2/3。
程序求得的解与解析解对比如图1-5所示(由于理论解与程序基本重合,所以将理论解乘以-1,方便比较):
a)位移
b)速度
图1-5分段常数插值法结果验证
由图1-5可知理论解与程序算得的解基本重合,可以验证程序的准确性。
1.2分段线性插值法
与分段常数插值法不同,分段线性插值法将每一微段的力当成一个线性的直线,对于每一个微段,可看成一个矩形和一个三角形脉冲的叠加。
图1-6为分段线性插值微段示意图。
图1-6分段线性插值法微段示意图
对于无阻尼的体系,后一个时间步的位移和速度可由前一个时间步相应的值求得:
(1-6)
(1-7)
分段线性插值法的流程图如图1-7所示,与分段常数插值法仅仅是迭代的方式有所不一样。
图1-7分段线性插值法流程图
程序源代码见附录,同样利用1.1节的算例进行验证,所得的结果如图1-8所示。
a)位移
b)速度
图1-8分段线性插值法结果验证
由上图可知程序的正确性。
2.加速度插值法
加速度插值法也叫逐步积分法,其对加速度进行插值,可分为常加速度法和线加速度法。
2.1常加速度法
图2-1常加速度法微段示意图
对于一个单自由度结构,其运动方程为:
(2-1)
将式(1-1)转变为增量方程:
(2-2)
在通过逐步积分,将时间转化为一系列微小的时间段
,如图2-1所示,现令
则t时间的速度可表示为:
令t=ti+1,则i+1时刻速度可以表示为:
(2-3)
同理,位移可以表示为:
(2-4)
将式(2-3)、(2-4)代入式(2-1),即:
(2-5)
此时,式(2-5)中只有
为未知变量,可直接求出
,之后再利用式(2-3)、(2-4),可求出ti+1时刻的速度与位移。
算法的流程图如下所示:
图2-2常加速度法流程图
算例验证的结果如下图所示,说明了该程序的正确性。
由于需要对加速度进行插值,此处增加了加速度验证。
a)位移
b)速度
c)加速度
图2-3常加速法结果验证
2.2线加速度法
线加速度法与常加速度法原理类似,其速度与位移的增量方程与常加速度法对应的方程略有不同,图2-4为线加速度法微段示意图。
a)位移
b)速度
图2-4线加速度法微段示意图
关于具体原理不在赘述,下图为线加速度法的流程图。
图2-5线加速度法流程图
算例验证的结果如图2-6所示。
a)位移
b)速度
c)加速度
图2-6线加速法结果验证
附录
分段常数插值法源程序
functionx=inter_force_constant(p,w,dt,k,v0,y0)
%分段常系数插值法
%p代表输入的力,w为结构基本频率,dt为时间间隔,k为结构刚度
%v0为初始的速度,y0为初始的位移
%输出的矩阵第一列代表时间,第二列代表位移,第三列代表速度
[r,~]=size(p);
x=NaN(r,3);
x(:
1)=p(:
1);
x(1,2)=y0;x(1,3)=v0;
fori=1:
r-1
x(i+1,2)=x(i,2)*cos(w*dt)+x(i,3)/w*sin(w*dt)+p(i,2)/k*(1-cos(w*dt));
x(i+1,3)=(-x(i,2)*sin(w*dt)+x(i,3)/w*cos(w*dt)+p(i,2)/k*sin(w*dt))*w;
end
分段线性插值法源程序
functionx=inter_force_line(p,w,dt,k,v0,y0)
%分段线性插值法
%p代表输入的力,w为结构基本频率,dt为时间间隔,k为结构刚度
%v0为初始的速度,y0为初始的位移
%输出的矩阵第一列代表时间,第二列代表位移,第三列代表速度
[r,~]=size(p);
x=NaN(r,3);
x(:
1)=p(:
1);
x(1,2)=y0;x(1,3)=v0;
fori=1:
r-1
x(i+1,2)=x(i,2)*cos(w*dt)+x(i,3)/w*sin(w*dt)+p(i,2)/k*(1-cos(w*dt))+(p(i+1,2)-p(i,2))/k/w/dt*(w*dt-sin(w*dt));
x(i+1,3)=(-x(i,2)*sin(w*dt)+x(i,3)/w*cos(w*dt)+p(i,2)/k*sin(w*dt)+(p(i+1,2)-p(i,2))/k/w/dt*(1-cos(w*dt)))*w;
end
常加速度法源程序
functionx=inter_a_constant(p,w,m,keci,dt,v0,y0,k)
%p代表输入的荷载,w为结构基本频率,keci为阻尼比,dt为时间间隔,m为结构质量,k为结构刚度
%v0为初始的速度,y0为初始的位移
%输出的矩阵第一列代表时间,第二列代表位移,第三列代表速度,第四列代表加速度
[r,~]=size(p);
x=NaN(r,4);
x(:
1)=p(:
1);
x(1,2)=y0;x(1,3)=v0;x(1,4)=4/3/dt/dt*y0;
c=2*keci*w;
fori=1:
r-1
K=k+2*c/dt+4*m/dt/dt;
dP=p(i+1,2)-p(i,2)+(4*m/dt+2*c)*x(i,3)+2*m*x(i,4);
dY=dP/K;
dV=2/dt*dY-2*x(i,3);
dA=4/dt/dt*(dY-x(i,3)*dt)-2*x(i,4);
x(i+1,2)=x(i,2)+dY;
x(i+1,3)=x(i,3)+dV;
x(i+1,4)=x(i,4)+dA;
end
线加速度法源程序
functionx=inter_a_line(p,w,m,keci,dt,v0,y0,k)
%p代表输入的荷载,w为结构基本频率,keci为阻尼比,dt为时间间隔,m为结构质量,k为结构刚度
%v0为初始的速度,y0为初始的位移
%输出的矩阵第一列代表时间,第二列代表位移,第三列代表速度,第四列代表加速度
[r,~]=size(p);
x=NaN(r,4);
x(:
1)=p(:
1);
x(1,2)=y0;x(1,3)=v0;x(1,4)=3/2/dt/dt*y0-3/2/dt*v0;
c=2*keci*w;
fori=1:
r-1
K=k+3*c/dt+6*m/dt/dt;
dP=p(i+1,2)-p(i,2)+m*(6/dt*x(i,3)+3*x(i,4))+c*(3*x(i,3)+dt/2*x(i,4));
dY=dP/K;
dV=3/dt*dY-3*x(i,3)-dt/2*x(i,4);
dA=6/dt/dt*dY-6/dt*x(i,3)-3*x(i,4);
x(i+1,2)=x(i,2)+dY;
x(i+1,3)=x(i,3)+dV;
x(i+1,4)=x(i,4)+dA;
end


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 结构 动力学 作业 docx
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《爱和自由》读书心得15篇.docx
《爱和自由》读书心得15篇.docx
-
《极致服务》读后感.docx
-
《上海市饮用水水源保护条例》.docx
-
《变化社会中的政治秩序》读后感.docx
-
《吵闹村的孩子》读后感15篇.docx
-
《摆渡人》读后感受1000字左右范文.docx
-
《国际贸易学》题库南京大学.docx
-
《诚信备考》主题班会活动.docx
-
《高等学校教师职业道德修养》考试要点演示教学.docx
-
《巴菲特的护城河》精华摘要.docx
-
《繁星春水》读后感14篇.docx
-
#电控发动机的故障诊断与排除.docx
-
《归去来兮辞》优化教案及课文解析.docx
-
《办公室秘书个人党性分析材料》.docx
-
《会飞的气球》大班教案.docx
-
#生命生活与安全5上.docx
-
《城南旧事》的读后感作文范文10篇.docx
-
《标志用公共信息图形符号 第1部分通用符号》GBT 100011.docx
-
《初级会计实务》考试试题及答案解析.docx
-
《公共基础知识》考点《公文写作与处理》.docx
-
《海底世界》大班教案.docx
-
#ds18b20可调温度控制器.docx
-
《爱的教育》读书笔记范文10篇.docx
-
《公路养护工程量清单及计量规范》编制.docx
-
《建设工程监理规范》新旧版本区别.docx
-
《生活补助申请报告》.docx
-
《纸质档案管理规范》word版.docx
-
00种英语游戏.docx
-
09多元实用才能2.docx
-
《财经法规与会计职业道德》全真模拟试题及参考答案四.docx
-
14秋学前教育教育理论期中考试试题.docx
-
《大数据导论》19秋期末考核0001.docx
-
幼儿教师资格考试《保教知识与能力》练习题及答案1.docx
-
形容热情的句子.docx
-
Bylayer设置和Byblock设置的应用CAD绘图知识word版本.docx
-
银行个人理财产品销售管理办法.docx
-
雅思口语8分.docx
-
400个字的作文写小鸭小鸭历险记作文400字.docx
-
pep Unit 教案 My class room教案.docx
-
营销大赛慕夕洗衣纸营销策划方案41.docx
-
幼儿园大班数学教案认识时钟6篇精选 1500字.docx
-
JGB350E高效包衣机使用说明书标准.docx
-
幼儿园大班主题教案蔬菜系列.docx
-
在全市人口资源环境工作会议上的讲话.docx
-
中学生国旗下讲话.docx
-
小班第一学期保育员个人工作计划.docx
-
政治中考时政热点专题二五大发展理念之协调.docx
-
周口市五险一金办事指南.docx
-
新年祝福短信大全.docx
-
《镜花缘》研究引发的思考.docx
-
八一建军节歌颂军人演讲稿5篇.docx
