 哈工大机械原理大作业任务书连杆机构参考模板.docx
哈工大机械原理大作业任务书连杆机构参考模板.docx
- 文档编号:25640517
- 上传时间:2023-06-11
- 格式:DOCX
- 页数:11
- 大小:274.52KB
哈工大机械原理大作业任务书连杆机构参考模板.docx
《哈工大机械原理大作业任务书连杆机构参考模板.docx》由会员分享,可在线阅读,更多相关《哈工大机械原理大作业任务书连杆机构参考模板.docx(11页珍藏版)》请在冰豆网上搜索。
哈工大机械原理大作业任务书连杆机构参考模板
连杆机构设计
1设计题目
B
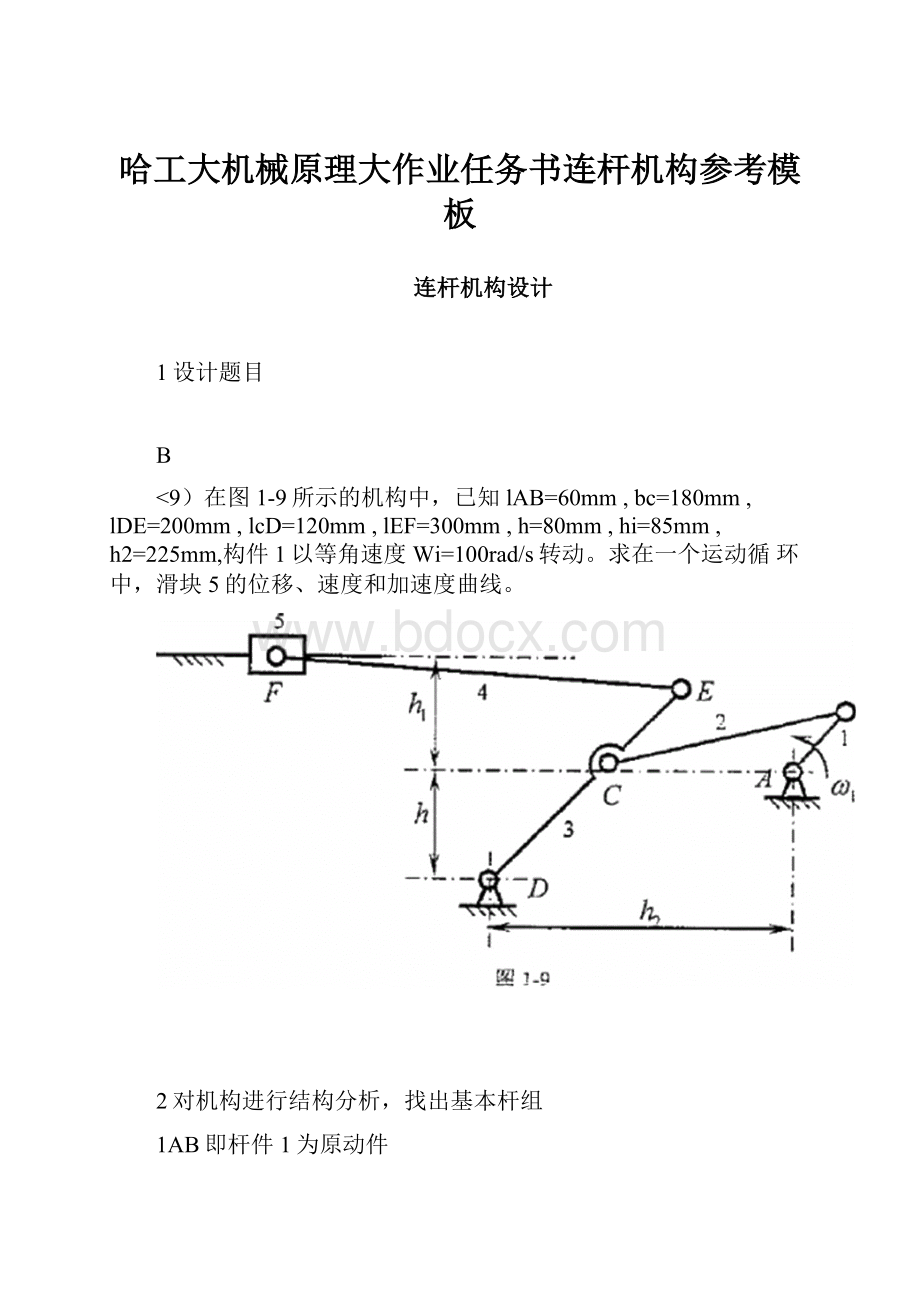
<9)在图1-9所示的机构中,已知lAB=60mm,bc=180mm,lDE=200mm,lcD=120mm,lEF=300mm,h=80mm,hi=85mm,h2=225mm,构件1以等角速度Wi=100rad/s转动。
求在一个运动循环中,滑块5的位移、速度和加速度曲线。
2对机构进行结构分析,找出基本杆组
1AB即杆件1为原动件
2DECB即杆件2、3为RRR型II级杆组
3其中CE为同一构件上点,
4EF和滑块即4、5为RRP型II级杆组
3各基本杆组的运动分析数学模型
2RRR杆组运动分析的数学模型
1.位置分析
设两个构件长度R,氏及外运动副Ni,N2的位置已知,求两个构件的位置角色及内运动副N3的位置。
选定坐标系及相应的标号如下图,构件的位置角R约定从响应构件的外运动副Ni引x轴的方向线,按逆时针量取。
设外运动副Nl,N2的位置坐标分别为Nl 221 d=[(Px-Ex)2"Py-P2y)2『 cos: =(d2R2R;)/(2Rd) 申=arctan((P2y-Py)/(Bx-Px) 哥八-: 内运动副N3点坐标为: P3x=Px+Rcosq P3y=Ry+RSinQ 构件K2的位置角: arctan[(F3y-By)/(忠-Bx)] 位置分析过程中应注意两个问题: <1)因为Nl,N2的位置及杆长Rl,&都是给定的,这就可能出现d>Ri+民或d 在这两种情况下实际上不可能形成RRR杆组,计算过程中应及时验算上述条件,如 满足上述条件应中止运算并给出相应信息。 <2)在给定N1,N2,R1,&的条件下,N3可能有两个位置如上图中的N3和N3,相应的弓二'*和弓二'-■,我们称为杆组的两种工作状态。 对于实际构件而言,杆组只可能在一种工作状态下运动,而且在机构运动过程中只要不出现d=R-尺的情况<这种情况下,机构处于瞬时运动不确定状态,设计时应避免)杆组就不会从一种工作状态变为另一种工作状态,所以运动分析时可预先按机构的实际工作位置,指明杆组是哪一种工作状态。 约定状态参数M: 叫怡弘为逆时针读取时M=1,叫2“3为顺时钟时M=-1。 2.速度分析 设外运动副N1,N2点的速度V1x,V1y及V2x,V2y已知,求N3点的速度V3x, V3y及构件Kl,K2的角速度11「。 因为P3x=P1xRCOS^i=l~2xR2C0S“2 Ry=Py+Rsinq=F2y+&sin^2 将上式对时间t微分: V3x=比乂一Risin齐二V2x_&「2sin丁2 v3y二MyR“cos冃二v2yR2,2cosj2注意到: <1 RiCOS^i=Ex-Pix,R1sin4=Ey—py 则: 1二-[(V2x-V1x)(Rx-Bx)(V2y-£)(By-P2y)]/Q 国2=-|XV2y-灯)(Ry-Ry)+(V2x-V1x)(P3x-Rx)]/Q 将J,''2值代入式<1)即可求得V3x,V3y 3.加速度分析 设外运动副N1,N2点的加速度a1x,a^y,a2x,a2y已知,求N3点的加速度a3x,a3y,及构件K1,K2的角加速度"2。 将式(1>对时间t微分得: *-(Ry-Py)(Ry-By)严11=「Ea1 l(P3x-P1x)-(P3x-Px)」[名2-]Eb_ 式中.Ea=a2x"a1x(V3y-My)'""(V3y"V2y^2 Eb-a2y-a1y-(V3x-V1x)1(V3x-V2x)2 「-[Ea(Bx—Bx)Eb(F3y-By)]/Q 客2=-[Ea(F3x-Rx)+Eb(F3y-Ry)]/Q 内运动副N3点的加速度a3x,a3y可由微分式V1)求得。 3平面运动构件V单杆)的运动分析 已知构件K上的N1点的位置Px,Py,速度为V1x,V1Y,加速度为a1x,a1y及过点的N1点的线段N^2的位置角二,构件的角速度3,角加速度&,求构件上点N2和任意指定点N3<位置参数N1N3=&,-“2叫“3=)的位置、速度、加速度。 4 RRP杆组运动分析的数学模型 1.位置分析 设已知外运动副点Nl及移动副导路上任意一选定参考点N2的位置,构件Kl的长度Rl及导路的位置角-,求构件&的位置角円及内运动副N3点的位置<如右图)。 : 角从水平线到 21 d=[(Rx叽)2+亿七)『 即-arctan[(Ry-氐)/(Rx-氐)] 由Nl向导路作垂线,垂足为A,令NlA= u,N2A=e,N3a=f则 e=dcos(: _-)> u=dsin(--) 221 f=(R2-u2)2 N3点相对于导路上参考点N2的滑移距离: R2=e_f 显然,当R<|u|时无解。 当R|u1时有两个解,对应于杆组的不同位置状态。 若/ N1N2N3 R2=ef,约定状态参数M=1;若/NiN2N3>2,则金=e-f,则约定状态 参数M=-10内运动副N3的位置坐标: P3x=P2xR2COS,Ry二F2yRzSin一: 构件Ki的位置角: q=arctan[(P3y-Ry)/(Rx-Rx)] 2.速度分析 Nl,N2点的速度为Vlx,Vly及v2x,V2y已知,导路的角速度': 求构件Ki的角速度1,点的速度%x,V3y及N3点相对于导路上重合点的相对速度构件% R3x=Px+Rcosq=P2x+R2cosP 珀=Ry+Rsinq=R2y+&sinP <2) 上式对时间t微分,可解出: 3=‘i=(-EvSin: FvCOS: )/Q R2=%2=TEv(R3x-Rx)+Fv(P3y-Ry)]/Q 式中: Ev=V2x-Vix「sin1 Fv=V2y-Wy--cos: Q=(F3y_Py)sinP+(F3x_Px)cosP N3点的速度为: V3x=Vix—Ri1sin^i J V3y严yRicosq 3.加速度分析 Ni,N2点的加速度aix,aiy,a2x,a2y及移动副导路的角加速度Y已知,求构件Ki的角加速度;i,N3点的加速度a3x,a3y,及N3点相对于移动副导路上重合点的相对角速度a「20 对式<2)进行两次微分可得: “=(-EAsin一: FAcosJ/Q a「2=—(EaQx一Px)+FA(F3y-Ry))/Q 式中: Ea=a2x-QxWi2(P3x-Px)-晞R2cosP-2沖Vr2Sinp-邛(Pjy-F2y) Fa=a2y_aiy+^i2(P3y_Py)_⑷;R2SinP+2⑷輕边cosP_g0(P3x_Bx) Q=(F3y_Ry)sin0+(F3x_Px)cosP N3点的加速度: 2 a3x=a! X-Ri‘1cos哥一R“siny 2 a3y=qy—Rc^sind+R岛cosq 4建立坐标系,程序设计及画图 以D点为坐标原点,自然方向为坐标xy轴 <1)滑块5的位移曲线<使用matlab编程画图,详见附录1) <2)滑块5的速度曲线<使用matlab编程画图,详见附录2) 8 <3)滑块5的加速度曲线<使用matlab编程画图,详见附录3) 附录 附录1 t=0: 0.0002.*pi: 0.04.*pi。 xd=225+60.*cos(100.*t>。 yd=80+60.*sin(100.*t>。 A0=2.*120.*xd。 B0=2.*120.*yd。 C0=120.A2+xd.A2+yd.A2-180.A2。 ai=2.*atan((B0+sqrt(A0.A2+B0A2-C0A2»./(A0+C0>>xe=200.*cos(ai>。 ye=200.*sin(ai>。 xf=xe-sqrt(300.A2-(165-ye>.A2>。 plot(t,xf> 附录2 t=0: 0.0002.*pi: 0.04.*pi。 xd=225+60.*cos(100.*t>。 yd=80+60.*sin(100.*t>。 A0=2.*120.*xd。 B0=2.*120.*yd。 C0=120.A2+xd.A2+yd.A2-180.A2。 ai=2.*atan((B0+sqrt(A0.A2+B0.A2-C0.A2>>./(A0+C0>>xe=200.*cos(ai>。 ye=200.*sin(ai>。 xf=xe-sqrt(300.A2-(165-ye>.A2>。 vf=diff(xf>。 t=0: 0.0002.*pi: (0.04-0.0002>.*pi。 plot(t,vf>。 附录3 t=0: 0.0002.*pi: 0.04.*pi。 xd=225+60.*cos(100.*t>。 yd=80+60.*sin(100.*t>。 A0=2.*120.*xd。 B0=2.*120.*yd。 C0=120.A2+xd.A2+yd.A2-180.A2。 ai=2.*atan((B0+sqrt(A0.A2+B0.A2-C0.A2>>./(A0+C0>>xe=200.*cos(ai>。 ye=200.*sin(ai>。 xf=xe-sqrt(300.A2-(165-ye>.A2>。 af=diff(diff(xf>>。 t=0: 0.0002.*pi: (0.04-0.0004>.*pi。 plot(t,af>


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 哈工大 机械 原理 作业 任务书 连杆机构 参考 模板
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《爱和自由》读书心得15篇.docx
《爱和自由》读书心得15篇.docx
-
《极致服务》读后感.docx
-
《上海市饮用水水源保护条例》.docx
-
《变化社会中的政治秩序》读后感.docx
-
《吵闹村的孩子》读后感15篇.docx
-
《摆渡人》读后感受1000字左右范文.docx
-
《国际贸易学》题库南京大学.docx
-
《诚信备考》主题班会活动.docx
-
《高等学校教师职业道德修养》考试要点演示教学.docx
-
《巴菲特的护城河》精华摘要.docx
-
《繁星春水》读后感14篇.docx
-
#电控发动机的故障诊断与排除.docx
-
《归去来兮辞》优化教案及课文解析.docx
-
《办公室秘书个人党性分析材料》.docx
-
《会飞的气球》大班教案.docx
-
#生命生活与安全5上.docx
-
《城南旧事》的读后感作文范文10篇.docx
-
《标志用公共信息图形符号 第1部分通用符号》GBT 100011.docx
-
《初级会计实务》考试试题及答案解析.docx
-
《公共基础知识》考点《公文写作与处理》.docx
-
《海底世界》大班教案.docx
-
#ds18b20可调温度控制器.docx
-
《爱的教育》读书笔记范文10篇.docx
-
《公路养护工程量清单及计量规范》编制.docx
-
《建设工程监理规范》新旧版本区别.docx
-
《生活补助申请报告》.docx
-
《纸质档案管理规范》word版.docx
-
00种英语游戏.docx
-
09多元实用才能2.docx
-
《财经法规与会计职业道德》全真模拟试题及参考答案四.docx
-
14秋学前教育教育理论期中考试试题.docx
-
《大数据导论》19秋期末考核0001.docx
-
千百度Word文档下载推荐.docx
-
整理丙烯酸甲酯工艺仿真Word文件下载.docx
-
英语中考样题Word文件下载.docx
-
完整版自己总结流式细胞仪的原理和用途文档格式.docx
-
7狮子和鹿教案Word格式.docx
-
一位老教师在家长会上的发言火了 家长有五层你在哪一层Word下载.docx
-
八年级物理上册知识点管理文档格式.docx
-
中级会计职称《经济法》模拟考试试题B卷 附解析Word下载.docx
-
中考历史复习专用 八年级上册3Word文档下载推荐.docx
-
I1地块养老院可行性报告Word格式文档下载.docx
-
社会实践心得体会敬老院社会实践心得Word文档下载推荐.docx
-
学年新外研初中英语九年级下册Module 4 模块过关检测卷文档格式.docx
-
最新人教版二年级数学上册第二单元弹性作业题及答案文档格式.docx
-
协会内部联谊活动策划书Word文档格式.docx
-
银行会计学复习题答案Word格式.docx
-
素质拓展培训热身系列活动Word格式文档下载.docx
-
联盟煤矿智能化升级建设实施方案设计Word文档格式.docx
-
中山市七年级下学期 期末地理试题题Word格式.docx
-
一年级青岛版数学上册第八单元雪山乐园Word文档下载推荐.docx
