 自动控制原理梅晓榕习题答案.docx
自动控制原理梅晓榕习题答案.docx
- 文档编号:25517660
- 上传时间:2023-06-09
- 格式:DOCX
- 页数:21
- 大小:261.74KB
自动控制原理梅晓榕习题答案.docx
《自动控制原理梅晓榕习题答案.docx》由会员分享,可在线阅读,更多相关《自动控制原理梅晓榕习题答案.docx(21页珍藏版)》请在冰豆网上搜索。
自动控制原理梅晓榕习题答案
习题参考答案
1-1工作原理当水位达到规定值时,浮子使电位器活动端处于零电位,放大器输出电压和电机电枢电压是零,电机停转,进水阀门开度不变。
水位高于规定值时,浮子使电位器活动端电位为正,放大器输出电压和电机电枢电压是正,电机正转,阀门开度减小,进水量减小,水位下降。
而水位低于规定值时,浮子使电位器活动端电位为负,电机反转,阀门开度变大,水位上升。
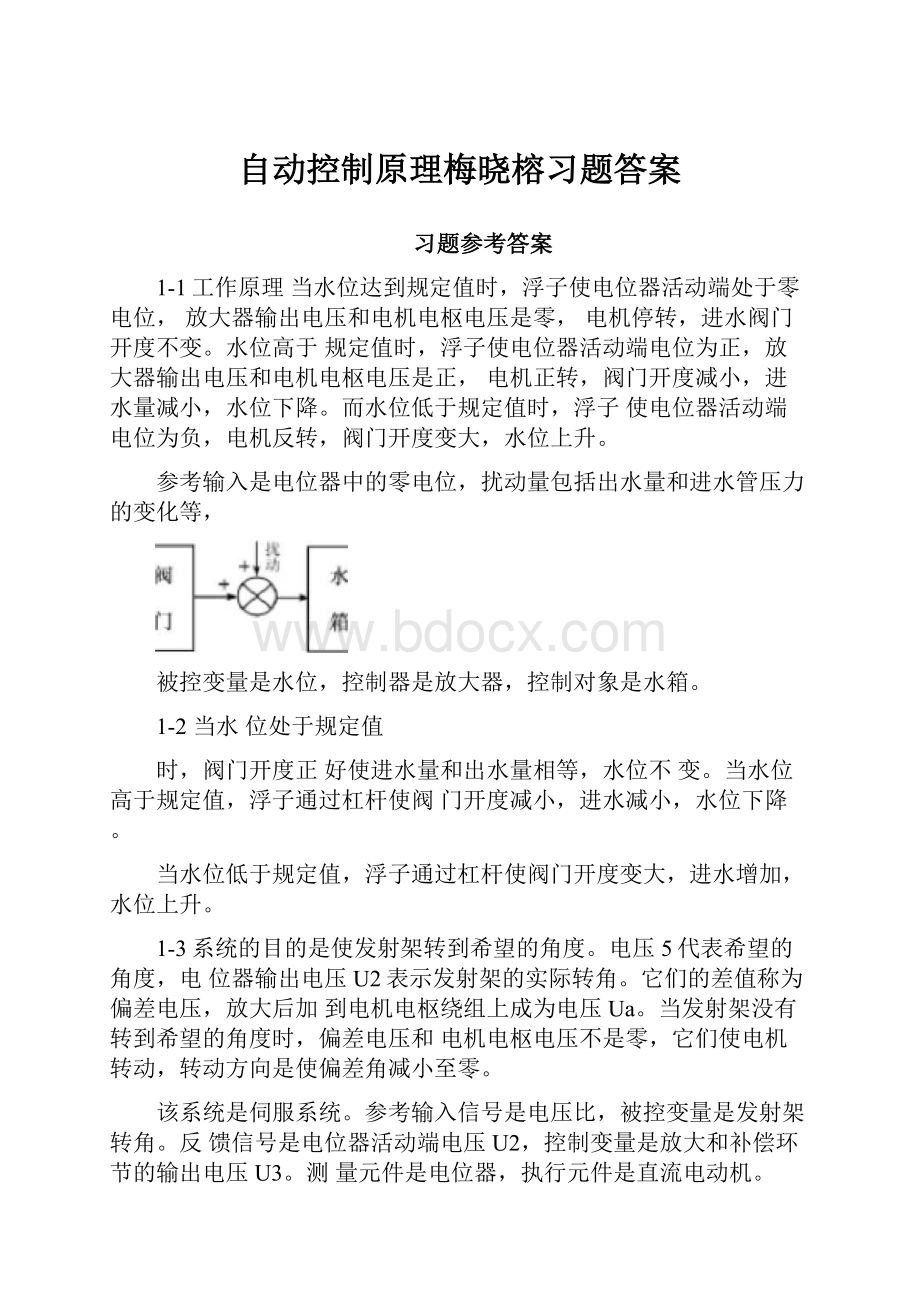
参考输入是电位器中的零电位,扰动量包括出水量和进水管压力的变化等,
被控变量是水位,控制器是放大器,控制对象是水箱。
1-2当水位处于规定值
时,阀门开度正好使进水量和出水量相等,水位不变。
当水位高于规定值,浮子通过杠杆使阀门开度减小,进水减小,水位下降。
当水位低于规定值,浮子通过杠杆使阀门开度变大,进水增加,水位上升。
1-3系统的目的是使发射架转到希望的角度。
电压5代表希望的角度,电位器输出电压U2表示发射架的实际转角。
它们的差值称为偏差电压,放大后加到电机电枢绕组上成为电压Ua。
当发射架没有转到希望的角度时,偏差电压和电机电枢电压不是零,它们使电机转动,转动方向是使偏差角减小至零。
该系统是伺服系统。
参考输入信号是电压比,被控变量是发射架转角。
反馈信号是电位器活动端电压U2,控制变量是放大和补偿环节的输出电压U3。
测量元件是电位器,执行元件是直流电动机。
1-4程序控制系统,控制器是计算机,执行元件是步进电动机,被控变量是刀具位移x。
1-5
(1)线性定常系统;
(2)线性时变系统;(3)非线性系统;(4)线性
时变系统;(5)线性定常系统;(6)线性时变系统
b)取m的平衡点为位移零点,列微分方程。
2-2设AB点及位移x见图中(b),(d)
图机械系统
a)对质量m列方程。
b)对A、B点列方程。
c)对Xo的引出点列方程。
k1(XiXo)k2Xof(XiXo)0fXo(k1k2)x°权Kx
Xo(s)fsK
Xi(s)fsk1k2
d)对AB点列方程。
f2d(^o2k2(XiXo)
dtdt
fid(Xx。
)kix
dt
2-3
(Fmi&&f&kiyik2(%y?
)
a)k2(yiy2)m,y2
ffi&fa(y2yi)Kyifa(yiy2)f2&k?
y2叫覺
222,2
2-4(Ji与J2凳」3)JTm转角与齿数成反比。
z2Z2Z4dt
2-5
(a)⑷
Ui(s)
RIR2CsR2
RiR2CsRi
R2
(b)血
Ui(s)
R2Csi
(RR2)Csi
(恍
L〔sR2
RiLiCs2(R|R?
CLi)sRiR2
(d)⑷
Ui(s)
(RiCis1)(R2C2si)
2-6
(a)U2(s)
Ui(s)
R2
Ri(F^Cs
i)
(b)
5(s)
R2丄
2C2s
11RzCiS)
C2RC2S
Ui(s)
Ri
R1C1si
RR2C1C2s2
(RG
R2C2
R,C2)s
i
(c)设Ci、C2、R2的公共端电压为^(t),运放输入端电位为零,根据节点
电流定律有
U3(s)
R2
1
Cis
U3(s)
1
C2S
Ui(s)
~RT
U3(s)
R2
1
C1s
U3(s)U2(s)
R
0
C1s
#C2s
C1S
R2C1s
1
)U3(s)
R3
1
U1(s)
R
1
瓦Ss)
R3C2s(R2C1s1)(&Gs1)
R1C1s
R2C1
R3C1R3C2
R2R3C2
1
R1C1s
2
R2R3R4C1C2s
[R2R32
C2)R4C2(R2R3)]sR2
R3
R-](R4C2s1)(R2C1s1)
2-7四
U1(s)
R2
R1LCs2(R1R2CL)sR1R2
2-8A=1+G3G4H4G2G3G4H3G1G2G3H2-G1G2G3G4H1
C(s)
R(s),
R
G1G2G3G4,11
C(s)
G1G2G3G4
R(s)
1
G3G4H4
G2G3G4H3
G1G2G3H2-G1G2G3G4H1
E(s)
R(s),
R
1,1
1G3G4H4
G2G3G4H3
E(s)
1G3G4H4
G2G3G4H3
R(s)
1
G3G4H4
G2G3G4H3
G1G2G3H2-G1G2G3G4H1
C(s)G1G2G3G4
R(s)1G3G4H4G2G3H3G1G2G3H2-GQ2G3G4H1
E(s)1G3G4H4G2G3H3
2-10(a)
R(s)1G3G4H4G2G3H3G1G2G3H2-GQ2G3G4H1
1G1G2G3G1G4G1G2H1G2G3H2G4H2
丽:
R1GGd1;R2GS
C(s)
R(s)
GG2G3G1G4
1G1G2G3G1G4G1G2H1G2G3H2G4h2
G4(1G2H1-G1G2H1G2G3H2)G1G2G3
1G2H1-GG2H
G2G3H
2-11(a)器
GGG2G3
1G2H1-G1G2H1G2G3H2
GG.E(s)1G2H2
(b)
C(s)
R(s)
G1G2G2G3
1G1G2H1
E(s)1-G2G3U
R(s)1G1G2H1
2-13
dcm-
(t)
dt
cq(t)
h(t)cq0
(s)1
H(s)cmscq
提示:
dt时间内加热器产生的热量是h(t)dt,热液体带走的热量是
cq[(t)o(t)]dt,液体温度上升d9(t)。
根据能量守恒定律列方程。
求传递函
数时取初始条件为零,即°0。
2-14yx0.5x2x
2-15u(t)ax(t)b(t)
dcR2
2-16RC-c0.24uri
dtr
RC*丄c0.48Rur0uriaa是与工作点有关的常数。
1
dtr
c(s)K
cTRC,K0.48RUr°/r
Ur(s)Ts1
提示:
热阻R——,q。
,:
单位时间内传出的热量和两者的温度差。
热q。
容量C沽,q:
单位时间内接受的热量。
设单位时间内电炉丝产生的热量是qi,
d?
电炉装置向外传出的热量是q。
,电炉本身接受的热量是q。
dt时间内炉内温升
是dc。
根据能量守恒定律有
qiqq0
(1)
2
dt
而qi0.24业,q°
r
(DB)sCA
R(s)
(TDB)s1H1H1H2CA
3-1系统
(1),单位冲激响应g(t)=10?
1(t)
单位阶跃响应c(t)=10t
系统
(2),单位冲激响应
3t
g(t)6.25esin4t
3-2
3-3
单位阶跃响应
p9.5%,tp
c(t)
1.25e3tsin(4t53.1)
0.785s,
ts
1s(5%),ts1.33s(2%)
由系统单位阶跃响应可知,
9.5%,tp1.96s,
ts2.5s(
1.2,d
0.05),ts
3.33s(
21.6,
0.02)
C(s)1弋
ss60
1.2
600
s10s(s60)(s10)
R(s)
600
C(s)
R(s)(s60)(s10)
600
s270s
.600102
n70
600
7,6
12
3-41)g(t)10e5tsin5t
2)C(s)
50~~2s
10s50R(s)
s10
s210s50
3)c(t)
2e5tsin(5t45)
4)c(t)
、、2e5tsin(5t45)..2e5tsin(5t
45)
3-5
1,
0.5tr2.42s,tp3.63s,p
16%
ts
6s(
0.05)或ts8s(0.02)。
3-6
(1)
10,
0.5,tp
0.36s,p16%
10、、2
14.1,
子0.354,tp0.24s,
p30.5%
3-7
0.05
0.69
ts
ts
2s,
2s,
0.05
0.02
2.17
2.90
3-9tp0.1s,p0.3
0.36,n33.7rad/s
3-10闭环特征方程
s2(110)s10K0
2
2n110,n10K,p,tp
K,
K1.32,
0.263
3-11从阶跃响应的稳态分量可知放大系数为1,从瞬态响应可知特征根为-1,
-2。
C(s)122
R(s)(s1)(s2)s23s2
3-
12
p1p212?
ts1ts2s,离虚轴比s2远,tp2tp3s2与sj虚部相同,
p3p232°
3-13特征方程为
2
s(1bK)sK0
0.456,n4.385rad/s
K19.23,b0.156
3-14
(1)两个正实部根,不稳定°
(2)2对纯虚数根,2j,不稳定(临界稳定)°
3-15
(1)稳定。
(2)两个正实部特征根,不稳定。
(3)稳定。
⑷稳定。
(5)两个正实部特征根,不稳定。
3-16(a)二阶系统,稳定
(b)特征方程是s321s210s100,稳定
3-17特征方程是,s33s22sK0,0 3=S° 3-18K=。 解52.5s2200666.250,振荡角频率 3-19 (1)K120 (2)K110由劳思判据知K>0时系统稳定,故有K120。 3-21 (1)ess()0 ⑵ess() 0 (3)ess(t) 2.042.4t 3-22 (1)1/101= 0000 0 ⑵ 0 ,1/=,Oo ⑶0,0,。 3-23先求系统时间常数。 4T 1 T 0.25,e10T2.5oC 3-24. (1)Kh1, 位置误差为1/110 ⑵ Kh0.1,位置误差为 3-25Kh0.1V/(rad/s),Kp 100 10 0.1 100 1 10 10 e 100 e10- 1Kp 1100 101 Kh 101 3-20100 5。 3-28(5t+=(5t+144°) 提示: 用动态误差系数法,或,求E(s)再取拉氏反变换。 最好用频率特性 法求解。 因为R(s)含有一对纯虚数极点,所以不可用终值定理。 3-29 (1)f(t)=1(t),稳态误差为1/K1。 f(t)=t,稳态误差终值为%。 (2)f(t)=1(t),稳态误差为0。 f(t)=t,稳态误差为1/K1 3-31 3-32 1E(s)TT2S3T2S2 K2R(s)s(T1s1)(T2s1)K1K2 (s)E^)Ts3(12T2©)s2(2K)s e()R(s)Ts3(12T)s2(2K1K2T)sK1K2 2k21K2 3-33偏差信号到扰动信号相加点的通路上,系统1有一个积分环节(电机),而系统2没有积分环节,是比例环节(杠杆)。 所以系统1不存在误差,系统2存在误差。 2/3,a180,60 4-13支根轨迹,起始于0,-1±j,终止于无穷远 实轴根轨迹(,0],根轨迹出射角是45°,与虚轴交点是.2j,对应的k=4 根轨迹见图。 4-2根轨迹的3个分支起始于0,0,终止于,和无穷远。 根轨迹与实轴的交点 是0和。 实轴上根轨迹是(,1.67],[,]。 根轨迹交虚轴于0.386j,对应的 k10.084。 根轨迹见图。 4-3根轨迹的曲线部分是以-4为圆心的圆。 实轴上(,4], [-2,0]是根轨迹。 分离点是,会合点是,对应的K为和。 K 响应无振荡分量。 4-43条根轨迹,起始于0,0,-10;1条终止于-1,另2条趋于无穷远 3 渐近线与实轴的交点a4.5,渐近线与实轴正方向的夹角为-,一 22实轴上[-10,-1]是根轨迹。 求分离点与会合点: s12.5,4,S30 根轨迹如图所示。 4-5根轨迹有两个分支,分别起始于0,3,终止于-1和无穷远。 实轴上[0,3], (,1]是根轨迹。 分离点和会合点是: S11,S23 当k=3时, 4-64支根轨迹,起始于0,3,1j,终止于-2和无穷远 所以s1在根轨迹上 k12 4-93个分支起始于0,-3,-7,终止于无穷远。 渐近线交实轴于,交角为60° 实轴上根轨迹是(,7],[-3,0]。 分离点是,对应的k=。 轨迹交虚轴于 21j4.58j,对应的k=210。 当


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 自动控制 原理 梅晓榕 习题 答案
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《初级会计实务》试题题库大全及答案详解.docx
《初级会计实务》试题题库大全及答案详解.docx
-
《管理学》习题教材15章.docx
-
《教育学》读后感范文精选6篇.docx
-
《林教头风雪山神庙》练习题.docx
-
《企业文化》期末复习应考指南央专.docx
-
《数据结构》知识题汇编09第九章排序试题.docx
-
《偷影子的人》读后感集合15篇.docx
-
《幼儿园工作规程》.docx
-
《残疾人证》管理办法.docx
-
《故事》教学反思.docx
-
《Java语言学习知识程序设计》复习资料汇编.docx
-
《短文两篇》课堂实录.docx
-
《基于MATLAB的信号与系统实验指导》编程练习试题doc.docx
-
《昆虫记》好词好句大全.docx
-
《木棉树》阅读答案.docx
-
《区间信号自动控制》练习册答案.docx
-
《山东省中小学教师职称评审表》高级教师一级教师二级教师专用A4纸正反面打印按页码装订许知忠.docx
-
《安娜卡列尼娜》读后感.docx
-
《繁星春水》读后感15篇.docx
-
《苏州市市级示范物业管理项目服务质量评价标准》 doc.docx
-
《采薇》教案.docx
-
《假如给我三天光明》阅读测试题有答案.docx
-
《小学数学教师》读书笔记精选多篇.docx
-
《给幼儿教师的一把钥匙》读书笔记.docx
-
《劳动法》教案设计.docx
-
《综合基础知识》必看考点《刑法》含答案.docx
-
《建筑构造》考试试题及答案精华.docx
-
3套打包北师大版四年级下册英语期末单元测试题解析版.docx
-
《雷锋的微笑》观后感.docx
-
《女人故事》电视栏目策划方案1.docx
-
7万多车对比分解.docx
-
《调皮的日子》题库.docx
-
安全知识大全.docx
-
2012人教版本七年级英语上册预备篇unit2导学案.doc
-
玻璃钢蓄水池施工方案.docx
-
质量管理课程设计10018.docx
-
2016中考英语试题分类汇编--动词(解析版).doc
-
幼儿园大班上学期期末考试 试题 附答案.docx
-
住房和城乡建设部关于印发《物业承接查验办法》的通知发展与协调.doc
-
托里县第三中学教育规划纲要实施两周年总结报告.docx
-
把事情做到最好读后感简短.docx
-
《货币金融学》复习选择题+解答删减版.docx
-
2016-2017学年---番禺区----中考英语一模---学生版.doc
-
3DMAX室内客厅效果图渲染实例.docx
-
南京市九年级上学期期中语文试题C卷.docx
-
be动词助动词练习题(入门).doc
-
2018年中考英语专题练习9《动词和动词短语》.doc
-
党组书记“第一责任人”职责情况报告范文稿.docx
-
预应力箱梁孔道压浆C参考配合比设计.docx
-
完整版国际结算票据部分测验及答案doc.docx
-
保密法宣传材料四修改版.docx
