 现代控制理论课后习题答案.docx
现代控制理论课后习题答案.docx
- 文档编号:25293343
- 上传时间:2023-06-07
- 格式:DOCX
- 页数:112
- 大小:178.44KB
现代控制理论课后习题答案.docx
《现代控制理论课后习题答案.docx》由会员分享,可在线阅读,更多相关《现代控制理论课后习题答案.docx(112页珍藏版)》请在冰豆网上搜索。
现代控制理论课后习题答案
、八,、■
刖言
本书是为了与张嗣瀛院士等编写的教材《现代控制理论》相配套而编写的习题解答。
本书对该教材中的习题给予了详细解答,可帮助同学学习和理解教材的内容。
由于习题数量较多,难易程度不同,虽然主要对象是研究型大学自动化专业本科学生,但同时也可以作使用其它教材的专科、本科、以及研究生的学习参考书。
书中第5、6、8章习题由高立群教授组织编选和解答;第4、7章由井元伟教授组织编选和解答,第1、2章由郑艳副教授组织编选和解答。
由于时间比较仓促,可能存在错误,请读者批评、指正。
另外有些题目解法和答案并不唯一,这里一般只给出一种解法和答案。
2005
编者
年5月
第2章“控制系统的状态空间描述”习题解答
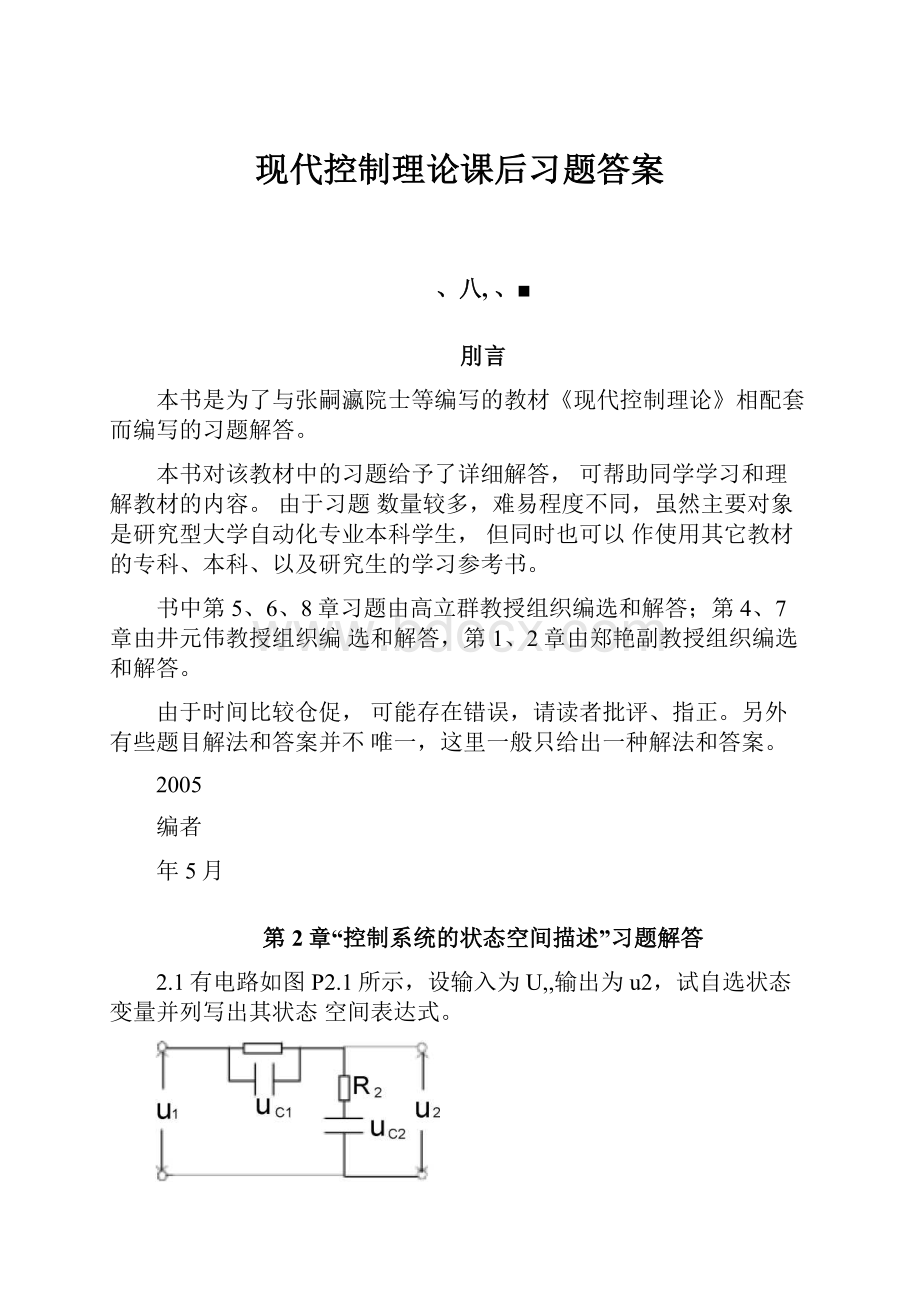
2.1有电路如图P2.1所示,设输入为U,,输出为u2,试自选状态变量并列写出其状态空间表达式。
Ri
图P2.1
解此题可采样机理分析法,首先根据电路定律列写微分方程,再选择状态变量,求得
相应的系统状态空间表达式。
也可以先由电路图求得系统传递函数,再由传递函数求得系统
状态空间表达式。
这里采样机理分析法。
设Ci两端电压为Uci,C2两端的电压为,则
duc2r
uc1C2R2uc2ui
(1)
dt
dUc1UddUc2
C1C2
(2)
dtR1dt
选择状态变量为X1Uc1,X2Uc2,由式
(1)和⑵得:
状态空间表达式为:
&
RR2Ci
1
1
Xi
X2U
RR2C
R2Ci
R2Ci
1
1
1
燧
Xi
X2
Ui
R2C2
R2C2
R2C2
y
U2UiXi
RiR2Ci
1
1
&
RiR?
Ci
R?
CiXi
R2C
X2
1
iX2
1
R2C2
R2C2
R2C2
y
i0u
X2
Xi
2.2建立图P22所示系统的状态空间表达式。
B2
-I
I-
m2
!
f(t)
Bi
Mi
I
图P2.2
解这是一个物理系统,采用机理分析法求状态空间表达式会更为方便。
令
f(t)为输入
量,即uf,Mi,M2的位移量yi,y为输出量,
选择状态变量xi
yi,X2=y2,X3=警,X4
dt
dy2
dt
根据牛顿定律对Mi有:
Mi&
Kxi
d(X2
Xi)
dt
duci
RiR2Ci
i
i
Uci
Uc2Ui
dt
RiR2Ci
R2Ci
duc2
i
i
1
Uci
Uc2
Ui
dt
R2C2
r2c2
r2c2
对M2有:
Ml?
&
f(t)
Bi
dx2
~dt
经整理得:
XX3
&X4
状态方程为:
X3
X
K
M1
Bi
Bi
X3
X4
Mi
Mi
/Bi
B2
1
(
)X4u
M2
M2
M2
Xi
Bi
X3M2
输出方程为:
yiXiy?
X?
写成矩阵形式为:
0
0
XX
0
0
&
K
0
&
Mi
X
0
0
1
0
0
0
i
Xi
0
Bi
Bi
X2
0u
Mi
Mi
X3
i
B
(Bi
-B2)
X4
M2
m2
2
m2
Xi
yii000x2
y20i00x3
X4
2.5系统的结构如图
P2.5所示。
以图中所标记的
Xi、X2、X3作为状态变量,推导其
状态空间表达式。
其中,
u、y分别为系统的输入、输出,
i、2、3均为标量。
解图P2.5给出了由积分器、放大器及加法器所描述的系统结构图,且图中每个积分器
的输出即为状态变量,这种图形称为系统状态变量图。
状态变量图即描述了系统状态变量之
间的关系,又说明了状态变量的物理意义。
由状态变量图可直接求得系统的状态空间表达式。
着眼于求和点①、②、③,则有
①:
Xi
iXi
X2
②:
X2
2X2
X3
③:
X3
3X3
u
输出y为yx1du,得
Xi
ai
i0
Xi
0
X2
0
a2i
X2
0u
X3
0
0a3
X3
i
Xi
y
i
00
X2
du
X3
2.7试求图P2.8中所示的电网络中,
以电感
Li、
L2上的支电流Xi、X2作为状态变量
的状态空间表达式。
这里u是恒流源的电流值,输出y是R3上的支路电压。
图P2.8RL电网络
解采用机理分析法求状态空间表达式。
由电路原理可得到如下微分方程
Xi
X2
R3
R2X21_2X2
uXiLi&XiX2R3/R|
yX2R3
整理得状态空间表达式为
(2)
2y
3y
u
u;
(3)
y
2y
3y
5y5u
7u0
试列写出它们的状态空间表达式。
(i)解选择状态变量
yXi,
&
X2,
y&X3,则有:
&
X2
&
X3
&
5为
4x2
x33u
y
Xi
状态空间表达式为:
&
0
i
0
Xi
0
&!
0
0
i
X2
0u
X3
54i
X3
3
Xi
yi
0
0
X2
X3
Ri
R3
R3
Xi
X2
Li
LiXi
R3
L2
2.8已知系统的微分方程(i)
yy4y5y3u;
(2)在零初试条件下取
(2)解采用拉氏变换法求取状态空间表达式。
对微分方程拉氏变换得:
2s3Y(s)3sY(s)s2U(s)U(s)
i2i
Y(s)s2i2s2
U(s)2s33s33
ss
2
由公式(2.i4)、(2.i5)可直接求得系统状态空间表达式为
x
0
1
0
X1
0
&
0
0
1
X2
0u
&
0
3
0
X3
1
2
X1
1
1
y
—
0
X2
2
2
X3
(3)解采用拉氏变换法求取状态空间表达式。
对微分方程(3)在零初试条件下取
拉氏变换得:
s3Y(s)2s2Y(s)3sY(s)5Y(s)5s3U(s)7U(s)
3
Y(s)5s7
~32
U(s)s2s3s5
在用传递函数求系统的状态空间表达式时,一定要注意传递函数是否为严格真有理分式,即m是否小于n,若mn需作如下处理
32
Y(s)5s7「10s15s18
~325~32
U(s)s2s3s5s2s3s5
再由公式(2.14)、(2.15)可直接求得系统状态空间表达式为
01
0
X1
0
X
00
1
X2
0u
&
53
2
X3
1
X1
y1
00x2
5u
X3
2.9已知下列传递函数,试用直接分解法建立其状态空间表达式,并画出状态变量图。
(1)g(s)
3
ss1
~c2
s6s11s6
g(s)
s22s3
~c2
s2s3s1
(1)解
首先将传函
(1)化为严格真有理式即:
g(s)
Y(s)U(s)
2
6s10s5s36s211s6
1g(s)
令g(s)
Y(s)U
E(s)U
c12l3
#、6s10s5s(S)123,
16s11s6s
(s)123,
16s111s26s3
即:
E(s)
Y(s)
6s1E(s)11s2E(s)6s3E(s)
U(s)
6s1E(s)10s2E(s)5s3E(s)
由上式可得状态变量图如下:
直接求得能控标准型状态空间表达式
&
010X|
0
X2
001x2
0u
&
6116x3
1
X1
y=
:
-6-11-6X2
u
X3
(2)解由已知得:
s12s23s
3
Y(s)
U(s)12
3,
12s3s
s
令:
E(s)
1
U(s)12
3,
12s3s
s
得:
E(s)
U(s)2s1E(s)3s
2E(s)s3E(s)
Y(s)
s1E(s)2s2E(s):
3s3E(s)
由状态变量图或公式(2.14)、(2.15)
状态变量图如下:
状态表达式如下:
&
0
1
0
X1
0
&!
0
0
1
X2
0u
&
1
3
2
X3
1
X1
y
32
1
X2
X3
2.13列写图P2.10所示系统的状态空间表达式。
U1
c
y1
7
厂
sa
L
U2总.
d
y2
解设
sb
图P2.10
X1(S)
y1(S)
(7)
则由系统方框图P2.10可得
X2(S)
y2(S)
(8)
X1(s)
U1(S)
X2(S)
sa
(9)
对式710进行拉氏反变换得
X2(S)
U2(S)
/、d
X1(S)sb
(10)
&(t)
axi(t)
CX2(t)
CUi(t)
X2(t)
dxi(t)
bx2(t)
du2(t)
yi(t)
Xi(t)
y2(t)
X2(t)
&
&yiy2
a
d
c
b
X
X2
Xi
X2
c
0
0U|
du2
i
C
0
i
2.i4
试将下列状态方程化为对角标准形。
&
0
i
Xi
0
(i)°
u
&
5
6
X2
i
X
0
i
0
Xi
23
(2)
X2
3
0
2
X2
i5
X
i2
7
6
X3
7i
(i)
解
①
求特征值
i
1A
5
6
(
6)
5(
5)(
则系统状态空间表达式为
Ui
U2
1)0
ii,
25
iIAvi
ii
Vii
0
55
Vi2
0
Vi
Mii
Vi2
i
21Av2
5i
V2i
0
5i
V22
0
V2i
i
V2
V22
5
解得
②求特征向量
a、对于11:
有
解得
b、对于25:
有
解得
③构造P,求
v1v2
④求A,B。
则得对角标准型
⑵解
①求特征值:
②求特征向量
a、对于1
1有:
12
1AP
P1B
1,
1)(
2,
2)(
3)0
1
1
0
Vn
0
V11
3
1
2
V12
0
V12
12
7
5
V13
0
V13
b、对于2
2有:
2
vii2
V124
V131
10vn0
322v120
1274v130
c、对于23有:
%1
V123
v133
310v110
332v120
1273v130
③构造P,求P
P1
1
④求A,B。
AP1AP
1951
122
3,P1321
353,
1
22
BP1B
则得对角标准型
9
5
1门
37
27
3
2
2
2
2
3
2
11
5
15
20
5
3
7
1
27
16
1
2
2
2
1
0
0
37
27
2
0
2
0X
15
20u
0
0
3
27
16
2
2.15试将下列状态方程化为约当标准形。
X
X3
2x1
2x2
3X3
U1
U2
解①求特征值:
412
12
(1)(3)20
113
11,
23
3
②求特征向量
a、对于1有
(
iI
A)V
0
3
1
2
%
0
%
0
即
1
1
2
V12
0
V12
2
1
1
2
V13
0
V13
1
b、对于3有
(
iI
A)V
0
1
1
2
V21
0
V21
1
即
1
3
2
V22
0
V22
1
1
1
0
V23
0
V23
1
(iI
A)Vi
Vi
1
1
2
V21
1
V21
1
即
1
3
2
V22
1
V22
0
1
1
0
V23
1
V23
0
③构造P,求
P1
0
0
1
1
0
1
1
P
2
1
0,
P
1
0
1
2
1
1
0
1
1
2
④求A,B。
10
0
A
P
1AP
03
1
>
00
3
0
1
1
3
1
3
4
B
P
1B
0
1
2
2
7
8
1
1
2
5
3
5
2
则得约当标准型
2.16已知系统的状态空间表达式为
4u
求其对应的传递函数。
解
g(s)
C(sI
A)1B
sI
(sI
A)1
(s5)(s1)3
g(s)
C(sI
A)1B
1
(s2)(s4)
2
4s36s91
s26s8
2.19设离散系统的差分方程为
y(k2)5y(k1)
3y(k)u(k
1)
2u
求系统的状态空间表达式。
解对差分方程取Z变换,得:
z2y(z)
g(z)
'5Zy(z)y(z)
一.2
3y(z)Zu(z)
z2
2u(z)
5z3
u(z)
z
X(k
1)
0
1%(k)
0
彳u(k)
1
X2(k
1)
3
5x2(k)
y
2
彳%(k)
1
X2(k)
离散系统状态方程式为
第3章“状态方程的解”习题解答
3.1计算下列矩阵的矩阵指数eAt。
(1)A
2t
e21
(1)解
At
e
2t
2t
e
(2)解
Ate
3te
te
3t
3t
(3)解
siA
siA
Ate
L1
si
(4)解:
siA
siA
At
2-i2
s
12
2s24
s
s24
cos2t
2sin2t
1
sin2t
2cos2t
3.2已知系统状态方程和初始条件为
x,
2
(1)试用拉氏变换法求其状态转移矩阵;
(2)试用化对角标准形法求其状态转移矩阵;
(3)试用化eAt为有限项法求其状态转移矩阵;
(4)根据所给初始条件,求齐次状态方程的解。
100
农A1O
(1)解A010
OA2
012
其中,
1
0
A1
1,
A2‘
1
2
则有
Ate
eA1t0
0eA2t
而
A,tt
e1e,
e
A2tL1
si
1
A2
1
s10
1
siA2
1s
2
1
s2
0
(s1)(s
1
2)
1
0
s1
s1
1
1
1
s2s
1
s2
A2t1
e2L
si
八1
te
0
A2
2tt
2t
ee
e
所以状态转移矩阵为
(2)
对于
对于
(3)
对于
对于
1,2
eAt
矩阵的特征值为
2有:
1有:
L1
A2
sl
P1
P2
1,
eA,
1,21,
2te
因为是二重特征值,故需补充方程
从而联立求解,得:
t
e
2t
e
pt
0
t
e
2t
1)(
P1
P2
2)
0
2te
0(t)
0(t)
tet
0
2t
0
2te
0
2t
e
0
t
e
2t
1(t)
1(t)
1(t)2
0
2t
e
42(t)
2(t)
2(t)
0(t)
2te
2tet
1(t)
3tet
2e2t2et
2(t)
2te
ettet
eAt
0(t)l
1(t)A2(t)A
2
2tt
e2te
0
0
0
0
0
3tet2e2t
e2t
2tet
0
2te
2tet
1
0
0
10
0
2tt
ee
tet
0
1
0
01
0
0
1
2
01
2
100
2et010
012
d00
0et0
2tt2t
0eee
(4)解:
x(t)eA(tto)x(to)eAtx(0)
et001et
0et000
2tt2teee
e2t
,有
3.3矩阵A是22的常数矩阵,关于系统的状态方程式&Ax
x(0)
2te
2te
x(0)
2
时
1时,
2et
试确定这个系统的状态转移矩阵
解:
因为系统的零输入响应是
(t,0)和矩阵A。
xt(t,0)x(0)
所以
2te
1
2et
2te
(t,0)1,
te
(t,0)
2
1
2te
2et
1
1
2
2te
et
1
1
2te
2et
1
2
2te
te
1
1
2et
2te
2et
2e2t
2te
te
2e2t
te
(t,0)
(t,to)满足微分方程
将它们综合起来,得
2tt
e2e
2tt
ee
1
(t,°)1
而状态转移矩阵的性质可知,状态转移矩阵
pl
t,toAt,t0
dt
和初始条件t0,t0I
因此代入初始时间t00可得矩阵A为:
ddt
1
tt°0
t〜2t
亠t
2t
2e
2e
2e
4e
2tt
2tt
2e
e
4e
et0
0
2
1
3
A
3.9已知系统&Ax的转移矩阵(t,t0)是
2et
2t
2te
2(e2t
2e2t
et)
t
e
时,试确定矩阵A。
解因为(t,t°)是状态转移矩阵,
所以有Adt%(t,t0)
将t。
0,(t°,t°)I代入得:
3.10已知系统状态空间表达式为
(1)求系统的单位阶跃响应;
⑵求系统的脉冲响应。
(1)解
011
34,B1,C11
(4)3(
3)
(1)0
11时,
23时,
P2
P2
Ate
0
3te
3
t
13t
e
e
2
2
3
t
33t
—
e
e
2
2
3te
1t
13t
e
e
2
2
1t
33t
e
e
2
2
将u(t)1(t)代入求解公式得:
3te
2
13te
2
x(t)
3t
33t
e
e
2
2
1t
13t
e
e
2
2
为(0)
1t
33t
X2(0)
e
e
2
2
若取x(0)0,则有
1t3ete3(t)
2o3et3e3(t)
3et
3te
Xi(O)
3et3e3t
Xi(O)
x(t)
et1
et


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 现代 控制 理论 课后 习题 答案
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《初级会计实务》试题题库大全及答案详解.docx
《初级会计实务》试题题库大全及答案详解.docx
-
《管理学》习题教材15章.docx
-
《教育学》读后感范文精选6篇.docx
-
《林教头风雪山神庙》练习题.docx
-
《企业文化》期末复习应考指南央专.docx
-
《数据结构》知识题汇编09第九章排序试题.docx
-
《偷影子的人》读后感集合15篇.docx
-
《幼儿园工作规程》.docx
-
《残疾人证》管理办法.docx
-
《故事》教学反思.docx
-
《Java语言学习知识程序设计》复习资料汇编.docx
-
《短文两篇》课堂实录.docx
-
《基于MATLAB的信号与系统实验指导》编程练习试题doc.docx
-
《昆虫记》好词好句大全.docx
-
《木棉树》阅读答案.docx
-
《区间信号自动控制》练习册答案.docx
-
《山东省中小学教师职称评审表》高级教师一级教师二级教师专用A4纸正反面打印按页码装订许知忠.docx
-
《安娜卡列尼娜》读后感.docx
-
《繁星春水》读后感15篇.docx
-
《苏州市市级示范物业管理项目服务质量评价标准》 doc.docx
-
《采薇》教案.docx
-
《假如给我三天光明》阅读测试题有答案.docx
-
《小学数学教师》读书笔记精选多篇.docx
-
《给幼儿教师的一把钥匙》读书笔记.docx
-
《劳动法》教案设计.docx
-
《综合基础知识》必看考点《刑法》含答案.docx
-
《建筑构造》考试试题及答案精华.docx
-
3套打包北师大版四年级下册英语期末单元测试题解析版.docx
-
《雷锋的微笑》观后感.docx
-
《女人故事》电视栏目策划方案1.docx
-
7万多车对比分解.docx
-
《调皮的日子》题库.docx
-
清水覆膜板项目可行性研究报告文档格式.docx
-
工作总结范文汽修工年度总结6篇Word下载.docx
-
油田公司统计工作管理制度Word格式.doc
-
高层建筑考试复习资料Word文档下载推荐.docx
-
活动方案策划要素Word格式文档下载.doc
-
海外接待指导手册Word文件下载.docx
-
消防应急预案及流程Word文档下载推荐.docx
-
初中数学说课设计Word格式.docx
-
XX烈士陵园及旧址纪念馆基础设施建设项目可行性研究报告Word格式文档下载.docx
-
消防应急预案(模板)Word下载.doc
-
浅谈《雷雨》中三一律的运用Word格式文档下载.doc
-
消防安全知识宣传教育制度Word格式.doc
-
江西XX房地产公司合理化建议管理制度Word文档格式.doc
-
精品文档宣传部办公室工作总结3篇易修改word版 10页Word文档格式.docx
-
办公室所有岗位职责范围 精品Word下载.docx
-
高压旋喷桩计算书要点Word文档下载推荐.docx
-
顶岗实习周记9篇Word文档格式.docx
-
高一生物下册期末联考检测试题Word下载.docx
-
购销合同印花税计税金额Word格式文档下载.docx
