 欧姆龙PLC伺服在包装机中的应用.docx
欧姆龙PLC伺服在包装机中的应用.docx
- 文档编号:25227165
- 上传时间:2023-06-06
- 格式:DOCX
- 页数:18
- 大小:530.90KB
欧姆龙PLC伺服在包装机中的应用.docx
《欧姆龙PLC伺服在包装机中的应用.docx》由会员分享,可在线阅读,更多相关《欧姆龙PLC伺服在包装机中的应用.docx(18页珍藏版)》请在冰豆网上搜索。
欧姆龙PLC伺服在包装机中的应用
欧姆龙PLC伺服在包装机中的应用
引言
枕式包装机又称接缝式裹包机,是一种卧式三面封口,自动完成制袋、填充、封口、切断、成品排除等工序的包装设备,实际应用中,与相应衍生机种、辅助机种相配合,能实现食品、日用化工、医药等行业自动化生产线的流水包装。
适应的包装物为一般块状、筒状规则物品,无规则异形物品,如:
饼干、蛋糕、化妆品、纸巾等。
包装成品的形式有单件包装、集合包装、带托盘包装、无托盘集合包装等。
传统的枕式包装机横封刀的运动曲线是由机械的凸轮来实现的,机械加工、安装复杂,运行噪音大,效率低;如果使用伺服系统来实现电子凸轮功能,对于机械安装、运行效率会有一定的提高。
本文详细介绍OMRON的控制器FQM1在包装机中实现电子凸轮的应用。
1.枕式包装机的工艺简介
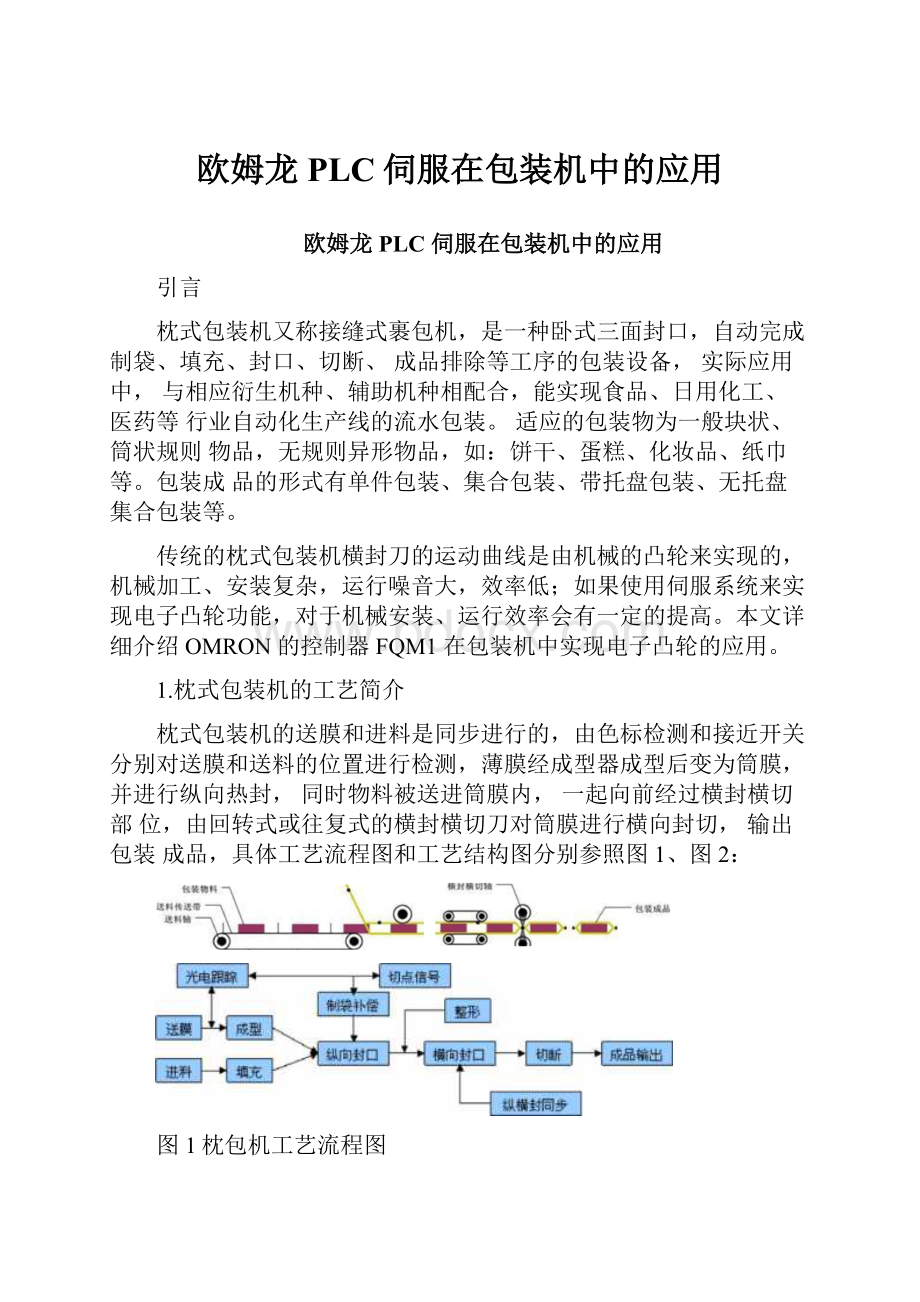
枕式包装机的送膜和进料是同步进行的,由色标检测和接近开关分别对送膜和送料的位置进行检测,薄膜经成型器成型后变为筒膜,并进行纵向热封,同时物料被送进筒膜内,一起向前经过横封横切部位,由回转式或往复式的横封横切刀对筒膜进行横向封切,输出包装成品,具体工艺流程图和工艺结构图分别参照图1、图2:
图1枕包机工艺流程图
图2枕包机工艺结构图
2.枕式包装机自动化程度的发展
随着食品包装行业的飞速发展,对类似枕包机这样的机械提出的
要求是提高包装速度与精度,全面包装品规格,操作趋于人性化以及售后维护成本降低。
根据枕包机的工艺不难看出,其控制重点在于送料、送膜以及横封横切轴三轴的配合,因此从第一代枕包机发展至今,主要就是对这三轴的控制进行改进以满足行业不断提升的要求,从低
端到高端、从机械控制为主到电气控制为主,枕包机控制的发展主要经历了以下几个阶段:
阶段一:
单变频
使用一台变频器加一台交流电机来工作,为了成比例的同时带动横封刀(加输送机)跟包装膜,需要一台无极变速箱来根据不同的膜长调节膜轴的速度。
从而实现了两路速度的输出,但是无极变速箱会随着使用时间的增长出现磨损影响使用精度,因此有他的局限性。
横封刀的运行曲线是由机械凸轮来实现的,因此机械结构复杂,传动机构多。
阶段二:
单变频+单伺服
使用一台变频驱动横封刀(加输送机),一台伺服驱动包装膜,取消了无极变速箱。
各部分运行独立,由PLC控制器协调两部分速度。
横封刀运动轨迹仍有机械凸轮实现。
阶段三:
双伺服
原理同单伺服+单变频,但其控制精度进一步提高。
阶段四(目前最先进的控制方式,本文介绍重点):
三伺服
三个伺服分别驱动横封刀、包装膜、供料输送机,横封刀的运行轨迹完全有伺服来实现,取消机械凸轮,简化了机械结构。
三部分的运行速度需要有高性能的控制器来控制,因此对于控制器的要求比较高,经过试验OMRON的FQM1控制器能完成这项功能,并且能提高包装速度速度。
3.三伺服枕式包装机的详细工艺及控制要求
三伺服枕包机是在双伺服枕包机基础上开发的一种高端枕式包装机,其技术核心就是用运动控制器中的电子凸轮功能替代原先的机械凸轮,完成机器中横封横切与拉膜牵引以及送料的配合,要求横切的位置能精确地定位在包装袋的色标上,误差范围应小于±2.5mm(根据色标宽度定),速度一般能达到200包/分钟。
3.1机器的启动检测定位
由于在机器的整个运行过程中保持送膜、送料、横封横切轴的位置准确非常重要,轴与轴之间按照包装物规格的不同有不同的位置对应点,因此在机器启动时就因将三轴的位置进行校准,找到位置对应点以便机器正常运行时按照对应点进行检测纠偏。
三轴的偏差检测通过不同的传感器进行:
送膜轴:
膜的色标位置通过色标传感器和伺服驱动器的编码器分频进行检测。
送料轴:
输送带的位置通过安装在输送带的接近开关和输送带伺服驱动器的编码器分频信号位置检测。
横封横切轴:
横封刀位置的检测通过安装在横封刀上的接近
开关和设定的横封刀每转的脉冲数进行检测。
机器启动时的检测定位流程如图3:
图3机器启动时三轴的检测定位流程
3.2机器运行时的工艺及控制
启动检测定位完成后,机器将进入正常运行状态,其控制重点仍
在于三轴的配合运行,工艺结构及控制图如图4:
,晶5箱卜
图4三伺服枕式包装机的工艺结构及控制图
图中所标的三轴的功能及控制要求分别为:
横封横切轴:
切割包装膜,把每包包装物分离,并且热封包装口,由伺服电机
驱动一对带刀导辊旋转对包装物进行横封横切,在横封轴旋转一周的过程中,当转到横封过程的角度时,横封轴必须与主轴保持同步,当转到其他角度时,横封轴的速度需要改变,横封的周期时间与主传送带送入一个包装物品的时间相同。
在这里,我们将进行横封过程的角度称为同步角,同步角的大小根据机械结构而定,目前使用最多的角度大小是66°左右。
横封轴转到同步角时,必须与送料轴保持速度同步,而转到其它角度时,需要加速还是减速,取决于横封轴固有长度与产品长度之间的大小关系,固有长度的定义如图5所示:
固有长度
图5固有长度的定义
根据固有长度与产品长度之间的关系,横封轴转到同步角以
外的角度时加减速控制要求入图6所示:
图6横封横切轴控制速度要求
送膜轴:
当包装薄
以防止滑差
带动包装膜,夹运,纵封轴,使包装膜与包装物同步,膜上需要色标定位时,必须在送膜轴的控制中加入纠偏,导致的累计误差,保证横切位置准确如图7:
■LjOS-,.1
图7正确的横切位置
送膜轴的纠偏流程如图8所示:
横封完成
色标检测
鸡主轴位置关系不变
1重新定义与主
轴位置关系
1
工
等待下一周期根据与主轴的位置关系进行脉冲输岀
图8送膜轴的纠偏流程
送料轴:
按照一定的速度带动包装物,把包装物送入包装膜中,物料间的间隔距离是由传送带上的档格分开的,可以保证物料被送入包装膜时位置的准确性。
但长时间连续运转可能会因为机械损耗导致偏差,因此送料轴也需要定位信号检测进行实时纠偏,其运动控制及纠偏的模式与送膜轴几乎一致,只是检测定位为信号采用了接近开关,与主轴同步跟随的参数也会有所不同。
4.OMRON公司FQM1运动控制器的介绍以及在三伺服枕包机中
的应用
4.1FQM1功能及特点描述
FQM1是OMRON的通用运动控制器,其特点就是可以进行灵活、快速的运动控制,适合需要8轴以下伺服控制且同步协调或跟随要求高的包装机械,如:
多伺服枕包机、连续式立包机、瓦楞纸生产线的送纸机构、全伺服卧式包装机等。
FQM1可实现的控制功能如表1所示:
庙?
ASHK
fiSMB
初晰
电7■凸卷
St比拘制
任想?
f脚
闿ShEI
壇矗岡申1
瞎酣?
制
卷舞
衍秦曜*禅才髭压■霍H
定董冲应刻
Kt«***|0(7¥粉
同去启对
皐亠计met
表1FQM1的控制功能
FQM1的性能特点有:
•根据并列分散处理性系统,从2轴到最大8轴稳定的运动
控制周期(例:
0.5〜2ms);
•内置直接控制脉冲输入输出/模拟量输入输出的高速周期处
理型引擎(例:
从输入信息到控制输出1个周期0.5ms〜2ms);
•轴控制间的控制周期的同步化、高速脉冲起动(最高
25^s〜)、高速模拟量输入输出(40^s)、高速计数器自锁(30卩》、高速浮动小数点演算等;
•模块化构造,可将枕包机中的理料、飞剪等环节程序模块
化。
4.2三伺服枕式包装机的OMRON系统方案
对于三伺服枕式包装机,FQM1是一款非常合适的运动控制器,配合OMRON的整套系统产品,构成一套完善的控制系统。
OMRON系统产品配置清单如表2:
名称
型号
数量
作用
PLC
FQM1
1
程序控制
G系列伺服
G伺服400W
1
拨叉电机
G系列伺服
G伺服1.5KW
2
横封切刀,包装膜牵引电机
色标传感器
E3S-VS1E4
1
检测包装膜上的
色标标记
温控表
E5EZ
4
纵封、横封温控
表2OMRON系统产品配置清单
OMRON系统产品配置结构如图9:
图9三伺服枕包机OC配置图
4.3控制系统的关键点
431主轴
如上所述,在三伺服滚刀式枕包机中,轴和轴之间的动作需要保持同步或相互协调,因此就需要定义一根轴作为主轴,其余轴都以它为参照,进行同步跟随或凸轮定位。
主轴可以用实际存在的三根轴中的一根来定义,也可以用虚轴来定义,定义成虚轴的优势在于可以省去控制器对主轴位置的判断处理时间。
由于FQM1支持虚轴功能,因此在这里我们定义一根虚轴为主轴
本文中的虚轴实际上使用了一个MMP模块的实际脉冲输出通道
(脉冲输出2),设置方式如图10:
启动冷至换设定循环时间|歸冲输入脉冲输出其他
脉冲输出仝
操作櫃式|绝对脉神蘇形模金)3
关闭丽iSUTTZnSSF"3
腫环第大计数|30000
图10MMP模块设置图
操作模式为绝对脉冲(环形模式),循环最大计数:
30000。
使用SPED指令直接输出脉冲每到脉冲值到30000时自动清零。
也就是每发送30000个脉冲相当于包装一个包装物,可以根据包装速度计算出发送的脉冲频率。
432横封横切轴的位置控制
由于本设备使用电子凸轮代替了机械凸轮结构,其速度分为两段速,因此采用APR指令与PULS指令结合应用的方式对横封横切轴进行控制。
首先计算出横封切刀的运行曲线跟虚轴脉冲的对应关系,对
应关系如图11所示:
图11横封横切轴与虚拟轴的对应关系
由于FQM1传承了OMRONPLC的功能块及ST语言编程功能,
因此在这里计算对应关系的算式可以用ST语言执行,并组成功能块
如图12所示:
图12横封切刀与虚轴对应关系计算
计算出对应关系后,将对应关系得数据输入APR指令的CAM表
如图13,再由APR指令根据虚拟轴的实时位置信息求出横封横切轴
的位置,如图14:
图13APR指令表的制作
1
fl»_iI
1盘
胡
KM)
Ur
rJOn
:
拓b
T4OZ
b—-1阿血E
图14APR指令执行
由于FQM1中的PULS指令经过设置只需要给定绝对位置值就会自动计算出输出频率控制伺服系统,因此最后只需将APR指令中横封横切刀的位置地址作为PULS指令的目标位置,即可完成横封横切轴的凸轮控制,如图15:
rijL5iMe.i
r»廿
~Itfit
图15PULS指令执行
433送膜轴的位置控制
送膜轴的位置控制跟横封刀的方式相同,只是由于包装膜的张力的变化会发生位置的偏差,在工作中必须进行修正。
首先计算出送膜轴运行给定的袋长需要的脉冲数,然后与虚轴的脉冲数进行线性对应,随时读取虚轴的脉冲值,然后根据线性关系求出膜轴应该对应的位置脉冲,通过PULS指令进行输出。
如果出现色标偏差可以修改袋长对应的脉冲数的最大值,即修改了线性对应关系,如图16所示,从而在下一周期中改变膜轴的位置,保证色标位置的准确性。
图16膜轴与虚轴点数线性对应关系图
在这里需要注意的是:
检测出偏差后,需要进行判断色标是超前还是滞后(可以在功能块中计算,ST语言比较合适),但是超前和滞后会有四种情况,有超前一个袋长的情况,没有一个袋长的情况;滞后一个袋长的情况,不到一个袋长的情况,如果不注意处理,就会发生误纠偏的情况。
在这里,我们仍用ST语言编写功能块,对此情况进行处理,功能块与ST源代码如图17、18所示:
JfWLia°fhi!
l
4J
■
VIIOilhl£jf造首吉
VI3-轴神理代、、
K10
IB硼
vti.ot
Mie
%
-
WM•利申机借动比-
Mt)-
图17纠偏判断功能块
__IIBa1I
b电砸忌解神审工嗨■冲站mK二F*+:
鼻神iU嘱亀■冲从冲觀茧唯.算沖君
曲星4〒中.除冲臺訂欣出和啤机_■码IS倩號忧/电机_吋话比YSO!
MSi*JtL>ittityt/?
)th扯
正盛斥壬-fill!
.
Ifa«^fltL>*12K«tbwn
JtSbdlL=»Srd«LHCtJ«.
・h*
UK旳1L-»iikflt-««kJ»L.
C
死区=in«:
丕反斥芒-trm
期ZcfUi«
f-
w更塩町
H^Si釜It附:
祕-檢稅外沖叶欣
«9K it離标总=t»mL =lru・. if INS^L4«豊5! _-韋宦" *宜販-她氐血 ・》4_诃, it穴ti芒tf*n・ 死笆-Lilt*. *n丄1f. 图18纠偏判断的ST源代码 434送料轴的位置控制 送料轴的位置控制方式与送膜轴的控制方式相同,只是参数有所变更,在此不再叙述。 435其他注意事项 需要注意PULS指令的过零点判断,如果判断不好会出现伺服倒转、突然高速运行、抖动的情况。 另外,如果伺服参数调整不对也就是伺服的相应不一样,在高速时会出现色标的偏差,此偏差不易在程序中修正 5.结束语 经过测试,设备可按照客户原先提出的以下要求正常运行: 1提高包装精度,正常可以达到120〜200包/分; 2减少机械结构,使机械结构简单,省去机械凸轮,易于维修,同时减少工作噪音; 3使用触摸屏操作使操作方式人性化; 4使用方便,操作简单,即便出现故障只要简单处理就可继 续运行。 5系统的稳定性,特别重要。 整个系统设计过程中,OMRON的FQM1的电子凸轮功能、同步总线高速运算功能起到了关键作用,使得机器在保证切刀位置精准的情况下高速稳定地运行。 飞剪、电子凸轮、高速、实时纠偏等功能,是目前很多OEM机械尤其是包装机械行业的高端机型提出的需求,在实现这些功能的同时,能够将原先的生产效率提高2〜3倍甚至更多,在不久的将来会成为主流趋势,而FQM1在三伺服枕包机中的成功应用也证明了 在此领域中的 OMRON在遇到此类机械的开发时有很好的产品对应,应用将会越来越多。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 欧姆 PLC 伺服 装机 中的 应用
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《初级会计实务》试题题库大全及答案详解.docx
《初级会计实务》试题题库大全及答案详解.docx
-
《管理学》习题教材15章.docx
-
《教育学》读后感范文精选6篇.docx
-
《林教头风雪山神庙》练习题.docx
-
《企业文化》期末复习应考指南央专.docx
-
《数据结构》知识题汇编09第九章排序试题.docx
-
《偷影子的人》读后感集合15篇.docx
-
《幼儿园工作规程》.docx
-
《残疾人证》管理办法.docx
-
《故事》教学反思.docx
-
《Java语言学习知识程序设计》复习资料汇编.docx
-
《短文两篇》课堂实录.docx
-
《基于MATLAB的信号与系统实验指导》编程练习试题doc.docx
-
《昆虫记》好词好句大全.docx
-
《木棉树》阅读答案.docx
-
《区间信号自动控制》练习册答案.docx
-
《山东省中小学教师职称评审表》高级教师一级教师二级教师专用A4纸正反面打印按页码装订许知忠.docx
-
《安娜卡列尼娜》读后感.docx
-
《繁星春水》读后感15篇.docx
-
《苏州市市级示范物业管理项目服务质量评价标准》 doc.docx
-
《采薇》教案.docx
-
《假如给我三天光明》阅读测试题有答案.docx
-
《小学数学教师》读书笔记精选多篇.docx
-
《给幼儿教师的一把钥匙》读书笔记.docx
-
《劳动法》教案设计.docx
-
《综合基础知识》必看考点《刑法》含答案.docx
-
《建筑构造》考试试题及答案精华.docx
-
3套打包北师大版四年级下册英语期末单元测试题解析版.docx
-
《雷锋的微笑》观后感.docx
-
《女人故事》电视栏目策划方案1.docx
-
7万多车对比分解.docx
-
《调皮的日子》题库.docx
-
公共政策案例分析.docx
-
汉语水平考试汉语水平考试HSK级真题第三套.docx
-
届高三语文上学期期中试题新人教版 第89套.docx
-
哈佛大学《员工激励》.docx
-
关于机械的英语文章学习.docx
-
虹口小学补习班新王牌补习班写作 四.docx
-
行政管理个人实习报告总结.docx
-
届中考复习山东省临沂市中考英语模拟试题有配套答案Word版.docx
-
含尾的成语34个带解释例句.docx
-
关于贫困感谢信模板十篇.docx
-
金融英语词汇大全.docx
-
关于学习的名言警句.docx
-
浩云IP对讲系统设计方案之欧阳美创编.docx
-
经典初级会计实务同步测试题与答案.docx
-
湖北工程机械产销基地建设项目可研技术方案.docx
-
观《非凡任务》有感.docx
-
经营年终工作总结.docx
-
合作联盟合同范本工作范文.docx
-
湖南省宁远县学年七年级英语上册期末试题.docx
