 四边形八节点等参元matlab程序.docx
四边形八节点等参元matlab程序.docx
- 文档编号:25117891
- 上传时间:2023-06-05
- 格式:DOCX
- 页数:14
- 大小:84.51KB
四边形八节点等参元matlab程序.docx
《四边形八节点等参元matlab程序.docx》由会员分享,可在线阅读,更多相关《四边形八节点等参元matlab程序.docx(14页珍藏版)》请在冰豆网上搜索。
四边形八节点等参元matlab程序
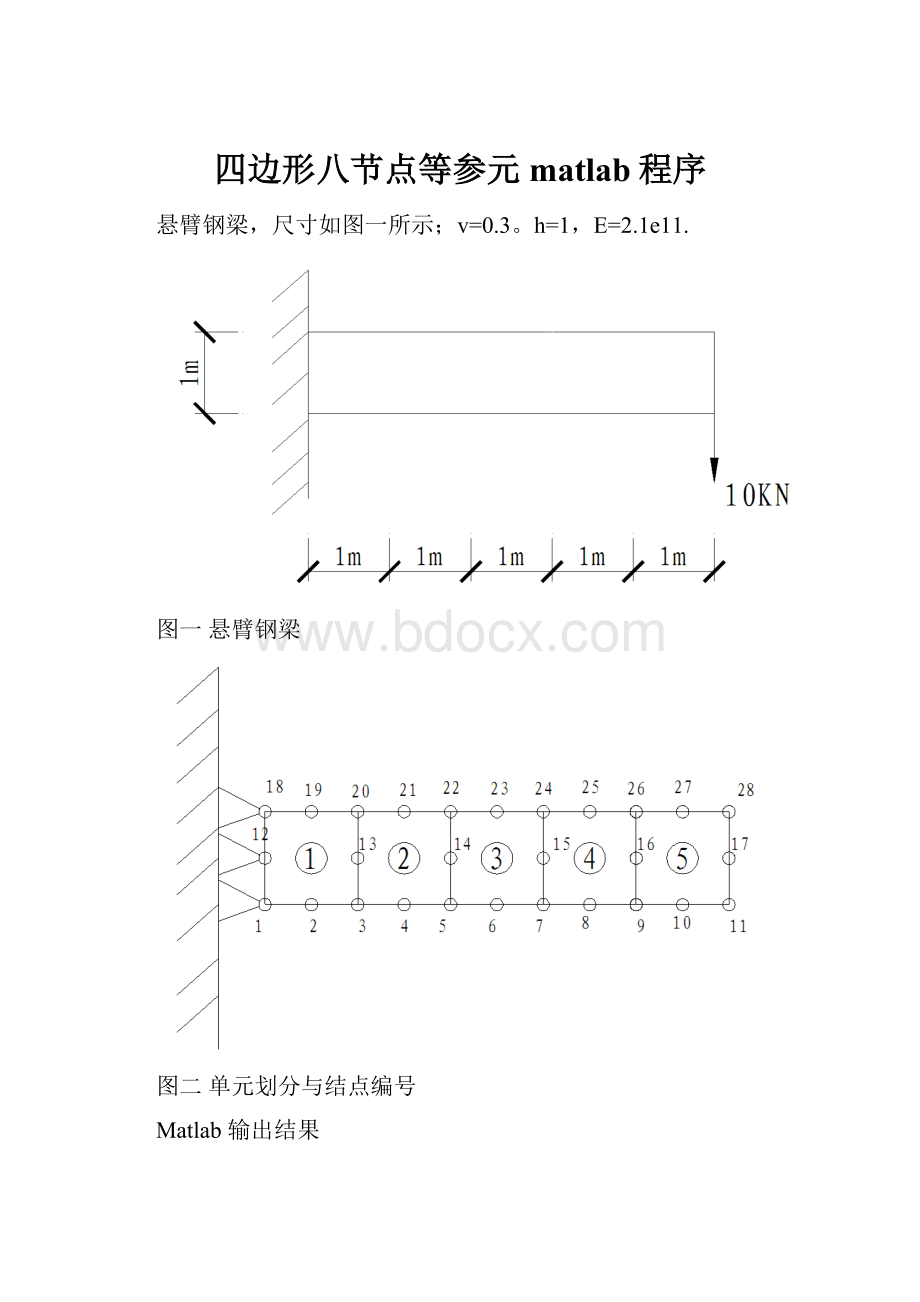
悬臂钢梁,尺寸如图一所示;v=0.3。
h=1,E=2.1e11.
图一悬臂钢梁
图二单元划分与结点编号
Matlab输出结果
附录Ⅰ:
有限元ANSYS分析结果
采用PLANE183单元(四边形八节点)单元得出的结构Y向最大位移为-0.216E-04。
约等于matlab平面四边形八节点等参元结点Y向最大位移-2.4024E-5。
附录Ⅱ:
%---------------四边形八节点等参元matlab计算程序----------------------------
%———————————主程序—————————
%*******************************************************************%************************************
%2012年
%本程序只能处理集中荷载作用下的情况
%只输出了节点位移、单元中心点的应力
%*******************************************************************%***************
%变量说明
%Evh
%弹性模量泊松比厚度
%NPOINNELEMNVFIXNNODENFPOIN
%总结点数,单元数,约束结点个数,单元节点数,受力结点数
%COORDLNODS
%结构节点整体坐标数组,单元定义数组,
%FPOINFORCEFIXED
%结点力数组,总体荷载向量,约束信息数组
%HKDISP
%总体刚度矩阵,结点位移向量
%******************************
clearall
formatshorte
FP1=fopen('bjd.txt','rt');%打开数据文件
%%读入控制数据
E=fscanf(FP1,'%f',1);%弹性模量
v=fscanf(FP1,'%f',1);%泊松比
h=fscanf(FP1,'%f',1);%厚度
NELEM=fscanf(FP1,'%d',1);%单元数
NPOIN=fscanf(FP1,'%d',1);%总结点数
NNODE=fscanf(FP1,'%d',1);%单元节点数
NFPOIN=fscanf(FP1,'%d',1);%受力结点数
NVFIX=fscanf(FP1,'%d',1);%约束结点个数
LNODS=fscanf(FP1,'%f',[NNODE,NELEM])';%单元定义:
单元结点号(逆时针)
COORD=fscanf(FP1,'%f',[2,NPOIN])';%结点号x,y坐标(整体坐标下)
FPOIN=fscanf(FP1,'%f',[3,NFPOIN])';
%节点力:
结点号、X方向力(向右正),Y方向力(向上正)
FIXED=fscanf(FP1,'%d',[3,NVFIX])';
%约束信息数组(n,3)n:
受约束节点数目,(n,1):
约束点号
%(n,2)与(n,3)分别为约束点x方向和y方向的约束情况,受约束为1否则为0
%*******************************************************************
%*******************************************************************
%========平面应力问题的求解==============
%
%*******************************************************************
%*******************************************************************
%—————————————————————
%刚度矩阵的生成
%计算刚度矩阵,并对约束条件进行处理
Ke=zeros(2*NNODE,2*NNODE);%单元刚度矩阵并清零
HK=zeros(2*NPOIN,2*NPOIN);%张成总刚矩阵并清零
%调用子程序生成单元刚度矩阵
form=1:
NELEM%m为单元号
Ke=K(E,v,h,...
COORD(LNODS(m,1),1),COORD(LNODS(m,1),2),...
COORD(LNODS(m,3),1),COORD(LNODS(m,3),2),...
COORD(LNODS(m,5),1),COORD(LNODS(m,5),2),...
COORD(LNODS(m,7),1),COORD(LNODS(m,7),2));%调用单元刚度矩阵
a=LNODS(m,:
);%临时向量,用来记录当前单元的节点编号
%对总刚度矩阵的处理
forj=1:
8
fork=1:
8
HK((a(j)*2-1):
a(j)*2,(a(k)*2-1):
a(k)*2)=HK((a(j)*2-1):
a(j)*2,(a(k)*2-1):
a(k)*2)+...
Ke(j*2-1:
j*2,k*2-1:
k*2);
end
end
end
%—————————————————————————————————
%对荷载向量进行处理
FORCE=zeros(2*NPOIN,1);%张成总荷载向量并清零
fori=1:
NFPOIN
b1=FPOIN(i,1)*2-1;b2=FPOIN(i,1)*2;%FPION(i,1)为作用点
FORCE(b1)=FPOIN(i,2);%FPION(i,2)为x方向的节点力
FORCE(b2)=FPOIN(i,3);%FPION(i,3)为y方向的节点力
end
%—————————————————————————————————
%将约束信息加入总刚,总荷载
fori=1:
NVFIX
ifFIXED(i,2)==1
c1=2*FIXED(i,1)-1;
HK(c1,:
)=0;%将一约束序号处的总刚列向量清0
HK(:
c1)=0;%将一约束序号处的总刚行向量清0
HK(c1,c1)=1;%将行列交叉处的元素置为1
FORCE(c1)=0;
end
ifFIXED(i,3)==1
c2=2*FIXED(i,1);
HK(c2,:
)=0;
HK(:
c2)=0;
HK(c2,c2)=1;
FORCE(c2)=0;
end
end
%—————————————————————————————————
%===========================================================
%===========================================================
DISP=HK\FORCE%计算节点位移向量
%===========================================================
%===========================================================
%———————————求解单元应力————————————————
stress=zeros(3,NELEM);
form=1:
NELEM
u(1:
16)=0;
d=LNODS(m,:
);%临时向量,用来记录当前单元的节点编号
fori=1:
NNODE
u(i*2-1:
i*2)=DISP(d(i)*2-1:
d(i)*2);
%从总位移向量中取出当前单元的节点位移
end
D=(E/(1-v*v))*[1v0;v10;00(1-v)/2];%弹性矩阵
%形成应变矩阵BM
BM=zeros(3,16);
fori=1:
NNODE
J=Jacobi(COORD(LNODS(m,1),1),COORD(LNODS(m,1),2),...
COORD(LNODS(m,3),1),COORD(LNODS(m,3),2),...
COORD(LNODS(m,5),1),COORD(LNODS(m,5),2),...
COORD(LNODS(m,7),1),COORD(LNODS(m,7),2),0,0);
[N_s,N_t]=DHS(0,0);
B1i=J(2,2)*N_s(i)-J(1,2)*N_t(i);
B2i=-J(2,1)*N_s(i)+J(1,1)*N_t(i);
BM(1:
3,2*i-1:
2*i)=[B1i0;0B2i;B2iB1i]/det(J);
end
stressm=D*BM*u';
stress(:
m)=stressm;
end
stress%输出应力
functionKe=K(E,v,h,x1,y1,x3,y3,x5,y5,x7,y7)
%=========单元刚度矩阵===============
%E弹性模量
%v泊松比
%h厚度
%x1,y1,x3,y3,x5,y5,x7,y7为4个角结点的坐标
%矩阵尺寸为16x16
Ke=zeros(16,16);
D=(E/(1-v*v))*[1v0;v10;00(1-v)/2];%弹性矩阵
%高斯积分采用3x3个积分点书74页
W1=5/9;W2=8/9;W3=5/9;%加权系数
W=[W1W2W3];
r=15^(1/2)/5;
x=[-r0r];%积分点
fori=1:
3
forj=1:
3
B=eleB(x1,y1,x3,y3,x5,y5,x7,y7,x(i),x(j));
J=Jacobi(x1,y1,x3,y3,x5,y5,x7,y7,x(i),x(j));
Ke=Ke+W(i)*W(j)*B'*D*B*det(J)*h;
end
end
functionB=eleB(x1,y1,x3,y3,x5,y5,x7,y7,s,t)
%调用导函数
[N_s,N_t]=DHS(s,t);
%求Jacobi矩阵
J=Jacobi(x1,y1,x3,y3,x5,y5,x7,y7,s,t);
%求应变矩阵B
B=zeros(3,16);
fori=1:
8
B1i=J(2,2)*N_s(i)-J(1,2)*N_t(i);
B2i=-J(2,1)*N_s(i)+J(1,1)*N_t(i);
B(1:
3,2*i-1:
2*i)=[B1i0;0B2i;B2iB1i];
end
B=B/det(J);
functionJ=Jacobi(x1,y1,x3,y3,x5,y5,x7,y7,s,t)
%-------Jacobi-----------
%单元坐标
%2,4,6,8点的坐标
x2=(x1+x3)/2;y2=(y1+y3)/2;
x4=(x3+x5)/2;y4=(y3+y5)/2;
x6=(x5+x7)/2;y6=(y5+y7)/2;
x8=(x7+x1)/2;y8=(y7+y1)/2;
x=[x1x2x3x4x5x6x7x8];
y=[y1y2y3y4y5y6y7y8];
%%调用形函数对局部坐标的导数
[N_s,N_t]=DHS(s,t);
%求Jacobi矩阵的行列式的值
x_s=0;y_s=0;
x_t=0;y_t=0;
fori=1:
8
x_s=x_s+N_s(i)*x(i);y_s=y_s+N_s(i)*y(i);
x_t=x_t+N_t(i)*x(i);y_t=y_t+N_t(i)*y(i);
end
J=[x_sy_s;x_ty_t];
functionN=shape(s,t)
%ξ,η
N
(1)=(1-s)*(1-t)*(-s-t-1)/4;
N(3)=(1+s)*(1-t)*(s-t-1)/4;
N(5)=(1+s)*(1+t)*(s+t-1)/4;
N(7)=(1-s)*(1+t)*(-s+t-1)/4;
N
(2)=(1-t)*(1+s)*(1-s)/2;
N(4)=(1+s)*(1+t)*(1-t)/2;
N(6)=(1+t)*(1+s)*(1-s)/2;
N(8)=(1-s)*(1+t)*(1-t)/2;
function[N_s,N_t]=DHS(s,t)
%形函数求导
%ξ,η
N_s
(1)=-1/4*(1-t)*(-s-t-1)-1/4*(1-s)*(1-t);
N_s(3)=1/4*(1-t)*(s-t-1)+1/4*(1+s)*(1-t);
N_s(5)=1/4*(1+t)*(s+t-1)+1/4*(1+s)*(1+t);
N_s(7)=-1/4*(1+t)*(-s+t-1)-1/4*(1-s)*(1+t);
N_s
(2)=1/2*(1-s)*(1-t)-1/2*(1+s)*(1-t);
N_s(4)=1/2*(1+t)*(1-t);
N_s(6)=1/2*(1-s)*(1+t)-1/2*(1+s)*(1+t);
N_s(8)=-1/2*(1+t)*(1-t);
N_t
(1)=-1/4*(1-s)*(-s-t-1)-1/4*(1-s)*(1-t);
N_t(3)=-1/4*(1+s)*(s-t-1)-1/4*(1+s)*(1-t);
N_t(5)=1/4*(1+s)*(s+t-1)+1/4*(1+s)*(1+t);
N_t(7)=1/4*(1-s)*(-s+t-1)+1/4*(1-s)*(1+t);
N_t
(2)=-1/2*(1+s)*(1-s);
N_t(4)=1/2*(1+s)*(1-t)-1/2*(1+s)*(1+t);
N_t(6)=1/2*(1+s)*(1-s);
N_t(8)=1/2*(1-s)*(1-t)-1/2*(1-s)*(1+t);
bjd.txt文件数据
2.1E110.31528813
1231320191812
3451422212013
5671524232214
7891626252415
910111728272616
0.00.0
0.50.0
1.00.0
1.50.0
2.00.0
2.50.0
3.00.0
3.50.0
4.00.0
4.50.0
5.00.0
0.00.5
1.00.5
2.00.5
3.00.5
4.00.5
5.00.5
0.01.0
0.51.0
1.01.0
1.51.0
2.01.0
2.51.0
3.01.0
3.51.0
4.01.0
4.51.0
5.01.0
170-10000
111
1211
1811


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 四边形 八节 matlab 程序
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《初级会计实务》试题题库大全及答案详解.docx
《初级会计实务》试题题库大全及答案详解.docx
-
《管理学》习题教材15章.docx
-
《教育学》读后感范文精选6篇.docx
-
《林教头风雪山神庙》练习题.docx
-
《企业文化》期末复习应考指南央专.docx
-
《数据结构》知识题汇编09第九章排序试题.docx
-
《偷影子的人》读后感集合15篇.docx
-
《幼儿园工作规程》.docx
-
《残疾人证》管理办法.docx
-
《故事》教学反思.docx
-
《Java语言学习知识程序设计》复习资料汇编.docx
-
《短文两篇》课堂实录.docx
-
《基于MATLAB的信号与系统实验指导》编程练习试题doc.docx
-
《昆虫记》好词好句大全.docx
-
《木棉树》阅读答案.docx
-
《区间信号自动控制》练习册答案.docx
-
《山东省中小学教师职称评审表》高级教师一级教师二级教师专用A4纸正反面打印按页码装订许知忠.docx
-
《安娜卡列尼娜》读后感.docx
-
《繁星春水》读后感15篇.docx
-
《苏州市市级示范物业管理项目服务质量评价标准》 doc.docx
-
《采薇》教案.docx
-
《假如给我三天光明》阅读测试题有答案.docx
-
《小学数学教师》读书笔记精选多篇.docx
-
《给幼儿教师的一把钥匙》读书笔记.docx
-
《劳动法》教案设计.docx
-
《综合基础知识》必看考点《刑法》含答案.docx
-
《建筑构造》考试试题及答案精华.docx
-
3套打包北师大版四年级下册英语期末单元测试题解析版.docx
-
《雷锋的微笑》观后感.docx
-
《女人故事》电视栏目策划方案1.docx
-
7万多车对比分解.docx
-
《调皮的日子》题库.docx
-
电磁阀知识.docx
-
小学一年级下册数学期末复习计划教案.docx
-
小学音乐教师个人工作总结.docx
-
电气电子毕业设计30直流电源监控系统.docx
-
电压电流回路讲解.docx
-
电子商务消费者权益保护问题研究本科论文.docx
-
定稿修订版东北农业大学网络教育学院学习指导手册.docx
-
沟通中的结构思考力.docx
-
古诗名句分类.docx
-
挂网喷射混凝土锚钉支护施工方案.docx
-
关于国家大剧院工程防水施工的建议.docx
-
关于劳动节的讲话稿劳动者最光荣讲话稿精选多篇.docx
-
医院新大楼网络建设规划.docx
-
宜宾市公开招聘小学语文教师专业科目资料doc.docx
-
以艺术为话题的作文7篇.docx
-
疫苗化药研发过程.docx
-
音乐网站设计与实现解析.docx
-
银行借调工作总结.docx
-
广东省深圳高级中学0910学年高二上学期期末考试语文doc.docx
