 系统仿真结课作业.docx
系统仿真结课作业.docx
- 文档编号:25021930
- 上传时间:2023-06-03
- 格式:DOCX
- 页数:16
- 大小:1.09MB
系统仿真结课作业.docx
《系统仿真结课作业.docx》由会员分享,可在线阅读,更多相关《系统仿真结课作业.docx(16页珍藏版)》请在冰豆网上搜索。
系统仿真结课作业
系统仿真导结课作业
1、概述
建模与仿真技术已成功地应用于航空航天、生产制造、交通运输、信息、生物、医学、材料、能源、教育、军事、社会、经济等众多领域;并成功地应用于产品研制的全生命周期,包括需求分析、方案论证、概念设计、初步设计、详细
设计、生产制造、试验试飞、运行、维护、训练等各个阶段。
仿真科学与技术正是从其广泛的应用中获得了日益强大的生命力,而仿真技术的发展反过来使得其得到愈来愈广泛的应用。
广义而言,仿真是采用建模的方法和物理的方法对真实环境客观事物进行抽象、映射、描述和复现。
基于系统原理、理论、定律、系统数据等应用计算机技术、软件技术和信息技术建立仿真环境(虚拟环境),在仿真环境中对客观事物进行研究。
客观事物包括真实环境中的实体/系统、自然环境(地形、大气、海洋、空间)、和人的行为(操作、决策、推理)。
仿真环境包括模型、数据、软件、物理效应设备、计算机等。
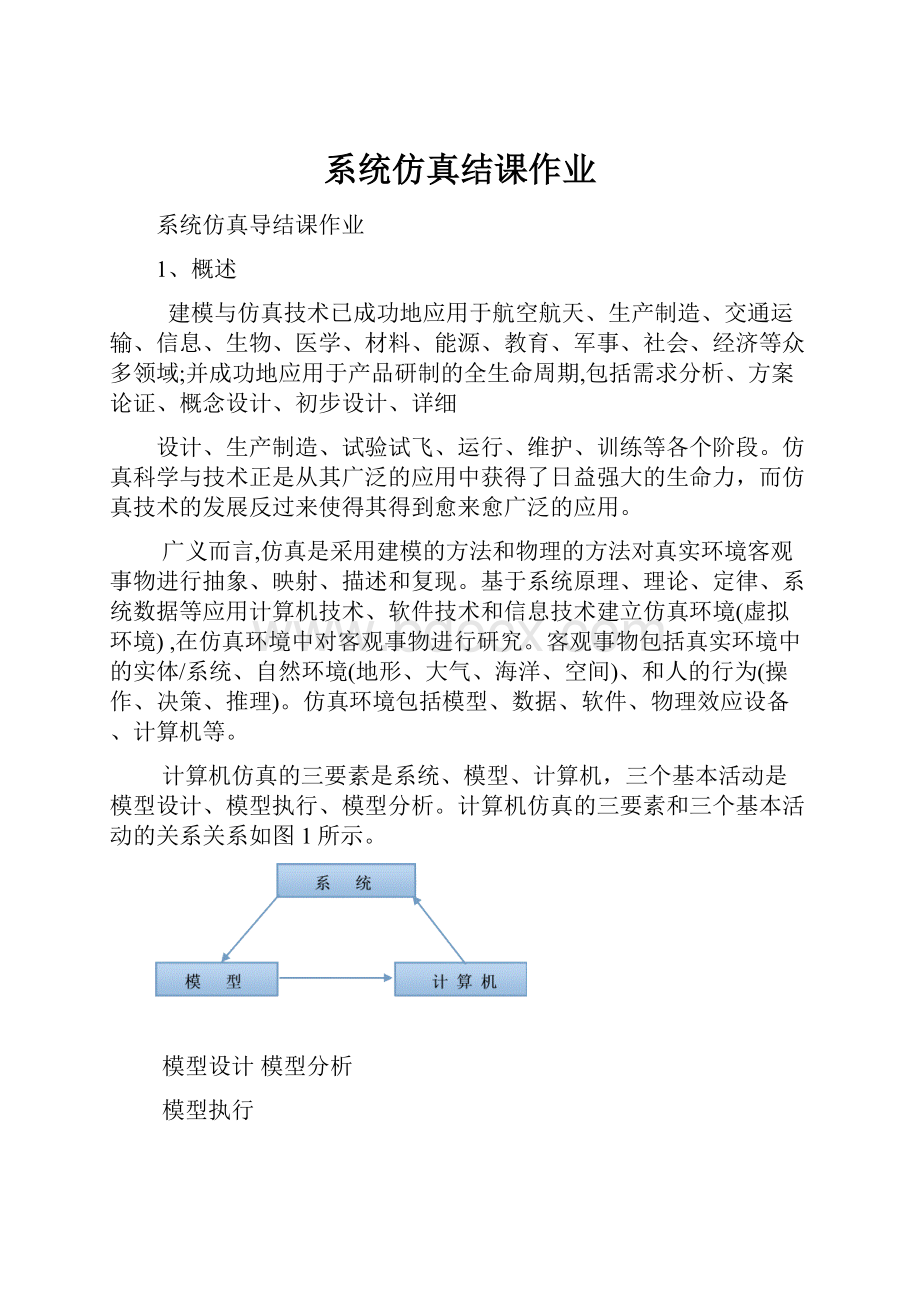
计算机仿真的三要素是系统、模型、计算机,三个基本活动是模型设计、模型执行、模型分析。
计算机仿真的三要素和三个基本活动的关系关系如图1所示。
模型设计模型分析
模型执行
图1
从模型设计到模型分析经历的过程,即对实物进行仿真可概括为以下几个方面:
1)问题的描述;
2)建立概念模型;
3)建立仿真模型;
4)收集数据;
5)编写程序;
6)在计算机进行模型试验;
7)模型和数据的验证;
8)仿真结果显示;
9)仿真结果分析和评估。
仿真是建立模型在计算机上运行,但这属于数学仿真,随着技术的发展,许多应用领域建立仿真系统时除了模型外还要求将实物和人员包含在仿真回路中。
由此可见,基于仿真设计与传统设计的方法和流程两者有很大区别(图2),基于仿真设计可以在计算机上建立虚拟样机,对产品的外形、结构、强度、动力学进行分析设计,满足技术要求后建立实物样机或直接制造产品,可以大量缩短产品研制周期,降低成本。
基于仿真设计或虚拟样机技术可以多学科综合、系统集成,提高有效性。
2、应用实例
1.系统仿真在天文望远镜设计中的应用
天文望远镜系统仿真是基于天文望远镜设计中三大基本模块:
光学系统设计、机械结构设计及分析和自动控制系统设计的常用软件,并基于规定的数据结构和输入输出格式,建立各自相对独立的模型,通过编制计算机程序将三者相互关系有机地联系起来构成一个集成的望远镜系统的设计和分析模型。
考虑外界环境的影响,诸如热、风、地震等载荷,通过软件模拟或实测数据的方式加入该集成模型。
据此对望远镜进行仿真分析得到各种响应乃至最终成像质量,评价望远镜工作性能和优化设计方案。
这种系统仿真技术的引入,使得在天文望远镜设计中可有效地对望远镜设计方案进行整体性价评估和方便迅速地进行优化改进,具体地,可概括为以下诸方面:
1)识别影响系统性能的关键因素;
2)验证设计之初某些探索性假设;
3)从系统层面上来优化和平衡各子系统的设计;
4)从系统层面上来权衡和克服各种干扰因素;
5)方便某些器件/设备的指标确定和选型,寻求更有效的提升望远镜性能的方法,优化设计方案;
6)在项目执行较早的阶段即可仿真以评价望远镜工作性能,并且逐步修正模型,直到项目结束。
子系统建模包括光学系统、机械结构系统和自动控制系统三大基本模块的计算机模型建立,参见图3,以机械结构模型为例,一般采用有限元软件ANSYS的参数化设计语言建立望远镜的有限元模型。
采用参数化建模便于调整设计和后续优化设计。
通过有限元模型可求解望远镜在重力、风载以及地震破坏等载荷下的响应,更为重要的是,通过有限元模态计算提取望远镜的固有频率和振型,将望远镜机械结构有限元模型转化为状态空间方程,以供控制仿真分析。
图3
为使集成化模型可接受外界干扰因素和载荷的作用并自动进行分析,需要建立相应的计算机模型进行模拟。
外界干扰因素和载荷主要指重力、风载及热、大气扰动和地震作用等。
以风载为例,风载模型的建立涉及风载的物理描述以及在望远镜有限元模型上作为边界条件的实施。
。
风速是随机变量,因此风载是随机载荷,计算分析中一般采用功率谱描述风速,并转化为风压功率谱分别作用于望远镜结构的有限元模型上进行分析,一般分为静风载和动风载两部分来考虑。
将随机风速写为
,即平均风速与随机风速之和,则风压可按
(1)式计算:
式中,
为风阻系数,为空气密度。
舍去高阶小项,上式可改写为静风压P和随机风压之和:
其中静风压P可直接作用于望远镜有限元模型进行分析,而一般用Davenport谱或Simiu谱(风速功率谱)来描述随机风的运动模型。
后者为
式中,n为频率,
为离地高度z处的平均风速,f无量纲频率函数,
为地面摩擦剪切风速函数。
考虑到结构的影响,上式还需要虑及空气动力衰减因子
,于是,可得到随机风压的功率谱:
上式即可用于有限元分析。
图4为风速2m/s的风压谱曲线。
在望远镜的系统仿真中还包括模型集成、模型简化、数据储存和显示、还涉及计算机编程技术、软件接口技术、计算技术乃至并行计算等技术。
2.基于数值仿真技术的单颗磨粒切削机理
磨削过程是磨具表面大量形状各异的磨粒参与的多刃切削过程。
单颗磨粒切削研究是认识复杂磨削作用的重要手段,但是单颗磨粒切削试验的实施和物理量的测量存在一定的难度。
2.1单颗磨粒切削物理模型
图1表示单颗磨粒去除材料的物理过程。
磨粒被简化为带有圆头的圆锥,随着磨粒以水平速度v切入工件材料,一部分工件材料在磨粒前端产生了塑性变形,产生塑性变形的材料有两种流动形式:
产生切屑和在磨粒两侧的塑性隆起;另一部分工件材料从磨粒下方流向磨粒后部并发生弹性回复。
图2显示了单颗磨粒去除材料过程中材料的流动方向。
其中上视图中的方向I代表了材料在磨粒侧面的流动形成了塑性隆起;方向II代表了材料流到磨粒圆头下方,并在磨粒后部弹性回复;方向III代表了材料形成切屑。
将磨粒接触的材料分为F-HEIG和HEI-JBK两个区域,区域F-HEIG内材料变形的形式为弹性变形,最大应力发生在F点,其值等于材料的屈服极限应力σY。
最小应力位于以
为圆心的圆周上,其值等于0。
区域HEI-JBK内材料的变形方式为塑性变形,这部分材料在沿磨粒垂直y轴剖面外圆周方向受到拉应力;在垂直y轴剖面径向方向受到压应力。
同时,作用于磨粒的材料塑性变形开始于弧HEI,终止于弧JBK,在这个过程中产生的拉应变和压应变分别为:
2.2单颗磨粒切削力学模型
F-HEIG区域x向和y向切削力分别表示为
HEI-JBK区域x向和y向切削力分别表示为
因此单颗磨粒切削合力的x向分量表达式为
单颗磨粒切削合力的y向分量表达式为
从单颗磨粒切削力表达式中可以看出,要对其进行求解需要三个方面的基本数据:
材料应力—应变关系(本构模型)、摩擦模型和磨粒几何参数。
淬硬AISID2钢(62HRC)由于其高硬度和良好的耐磨性,是一种被广泛应用于模具制造行业的金属材料,在本研究中被选为被加工材料。
迄今为止研究者提出了多种这样材料的本构模型,其中符合幂指数关系的材料模型是一种普遍适用的材料模型,其表达式为
预测单颗磨粒切削力的另一个重要参数就是平均摩擦因数。
利用CETR公司的UMT-2高速球盘摩擦试验机测定了不同滑动速度下AISID2钢和氧化铝球的摩擦因数(如图3所示),用于有限元仿真摩擦模型的建立。
从而得到摩擦模型。
对于磨粒几何参数,研究中以WA60L8V砂轮磨粒的平均几何参数作为有限元的输入条件,WA60L8V砂轮磨粒的平均几何参数:
磨粒顶角2θ=73.74°,磨粒圆头半径r=41.61μm。
从而得到其几何尺寸。
验证试验在划痕试验机上进行,试验机采用的是金刚石压头,压头形状是圆头圆锥,压头顶角为120°,压头圆头半径为0.2mm,滑动速度为4mm/min,设垂直载荷Fn=15N、25N、35N、45N,划痕长度为4mm。
划痕过程中记录划痕阻力f,与解析计算、有限元分析结果进行对比。
利用Matlab进行相应的解析计算可以得到压头在滑动方向上的阻力。
了试验结果和解析计算、有限元计算结果的对比,可以发现,解析计算、有限元计算结果与试验结果的吻合程度较好,基本证明了所建立的力学模型和数值仿真模型是准确的。
3.码垛机器人的轨迹规划与仿真分析
针对码垛机器人在高速运行过程中产生的冲击问题,以优化运行节拍提高效率为目的对码垛机器人的运动轨迹进行规划利用笛卡尔空间圆弧插补方法对运轨迹进行优化,并在此基础上利用三次曲线插补对关节运动轨迹进行了再次修正,基于建立模型对规划结果进行了仿真结果表明通过轨迹曲线规划方法使得码垛机器人在运行过程当中满足了减小运行冲击和提高运行效率的要求。
3.1空间圆弧轨迹的插补
空间圆弧插补的路径如图5所示:
计算可得空间圆弧插补的递推插补方程为:
为切向进给方向。
根据上述方法可以求出规划轨迹插补点的空间坐标,利用这些点使用Matlab可以绘制出仿真空间轨迹如图6所示,图中曲线所取插补岡弧半径r=50cm插补点间距l=10cm,图中黑色的轨迹为原轨迹,圆点为规划轨迹。
可以证明在货物提升之后到货物搬运过程的曲线由之前的尖锐夹角过渡成为平滑的圆弧,避免了由于尖锐过度造成的问题。
图6轨迹规划空间及关节运动曲线
由轨迹规划曲线我们可以知道根据现有轨迹运动,r值变化存在一个现变小后变大的过程,这个过程实际上是多余的,它会引起加减速过程从而减缓运动速度。
在实际运动中所做的运动路程更氏速度变化也更大更大的运动变化同时也会造成更明显的震动和冲击。
考虑到上述问题,有必要对关节的运动曲线进行重新规划。
对于上述问题本文利用三次曲线插补的方法进行处理。
三次曲线具有二阶可导性,其表达方式保证了其一阶求导结果即速度曲线平滑和二阶求导结果即加速度曲线的连续性在原有插补点基础上可以保证所得结果符合路程运动和速度曲线的要求。
可以推导出修正插补曲线的方程为:
对于方程插补确定起始点位置坐标
和速度
以及终止点的位置坐标坐标
和速度
,可得到方程组:
规划中胜定速度在起始点和终止点皆为0,因此由方程式可以求出所需要的A、B、C、D四个未知量以确定三次曲线的方程。
通过Matlab仿真如图7所示。
图7轨迹规划空间及关节运动曲线
通过关节运动轨迹图7可以看出r,关节轨迹,运动满足要求不再出现富动。
速度曲线图也显示速度变化更加平稳,幅值变化不大。
4.计算机仿真技术及其在生产系统中的应用
生产系统是一个为了生产某种或某类产品,综合生产工艺、生产计划、质量控制、人员调度、设备维护、物料控制等各种技术为一体的复杂系统。
然而生产系统一般都属于复杂离散事件系统,至今尚无一种数学方法能精确地解析地求解这类问题。
因此,计算机仿真是对生产系统进行分析实验和评价的最简单、最经济、最有效的方法。
它可以把所有的资源、产品生产研制周期、库存、在制品数等动态地结合起来,被认为是解决现代制造过程中复杂问题的理想方
法。
下面是作者利用Promodel6.0建立的一个针对某机械加工厂生产车间的系统规划模型,该车间包括2台数控车床、1台清洗机和1套检测装置,其布置如图1所示。
图1
假定加工作业到达车间的间隔时间为均值为20min的指数型随机变量;加工作业在NC1和NC2之间的工作量分配遵循1:
1的比例;车间雇佣1位技术人员负责从机加工到检验入库的所有物料搬运和机床操作。
其工艺流程和加工时间分别是:
机加工U(15,5)min;清洗U(5,1)min;检测U(8,4)min。
该车间为了为了扩大生产能力,提高设备使用率,拟通过改善物料搬运过程的形式对现有系统进行改造。
经过研究和调研,给出了以下两种不同的改善
方案。
1)车间雇佣3个技术人员(如图2)。
则各个加工环节中的搬运时间均服从E
(2)分钟;车间的生产成本和产品净利润如表1所示。
2)添加输送装置(如图2)。
则各个加工环节中的搬运时间由输送装置长度和输送速度决定,且已知每条输送装置的长度为50m,输送速度为40m/min;设备投资和维修费用等如表2所示。
如图2
假定在保证车间逐日连续工作的条件下,利用以上所收集的生产数据,建立了如图2、图3所示的仿真模型,然后我们对生产系统进行了10次、每次运行100小时的仿真,可得到如表3、表4所示的仿真结果。
从表4中可以看出,在系统运行的100小时里,系统生产了747件产品,将设备投资和维修费用折算到加工成本后(具体公式略)每小时的净利润额也增加到了122.31元,分别比方案1提高了24.9%和163.03%;而且各种设备也得到了充分的利用。
综合对比以后,可以发现方案2是相对最优的系统优化方
案。
从上述对生产系统的仿真可以看到:
运用仿真可以通过对生产系统的简单描述,动态的为生产系统地改善决策作出量化的描述,为提高生产系统的效率提供较为准确的量化依据。
当然,这只是一个简单的过程仿真的示例。
对于复杂的生产系统而言,系统间的关系和影响因素将更加复杂,单靠人的能力是无法对这些因素进行分析和预测的,计算机仿真技术对管理人员的帮助就更加明显了。
3、结束语
经过一个世纪的发展,仿真科学与技术已经形成了独立的知识体系。
目前,建模与仿真技术已成功地应用于航空航天、信息、生产制造、交通运输、生物、医学、材料、能源、教育、军事、社会、经济、等众多领域,以及产品研制的全过程,包括需求分析、方案论证、设计、制造、试验、维护、运行、训练等。
建模/仿真技术与高性能计算一起,正成为与理论研究、实验研究并列的第三种科学研究手段,可以对已有的或设想的事物进行研究,或发现新现象、新理论。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 系统 仿真 作业
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《初级会计实务》试题题库大全及答案详解.docx
《初级会计实务》试题题库大全及答案详解.docx
-
《管理学》习题教材15章.docx
-
《教育学》读后感范文精选6篇.docx
-
《林教头风雪山神庙》练习题.docx
-
《企业文化》期末复习应考指南央专.docx
-
《数据结构》知识题汇编09第九章排序试题.docx
-
《偷影子的人》读后感集合15篇.docx
-
《幼儿园工作规程》.docx
-
《残疾人证》管理办法.docx
-
《故事》教学反思.docx
-
《Java语言学习知识程序设计》复习资料汇编.docx
-
《短文两篇》课堂实录.docx
-
《基于MATLAB的信号与系统实验指导》编程练习试题doc.docx
-
《昆虫记》好词好句大全.docx
-
《木棉树》阅读答案.docx
-
《区间信号自动控制》练习册答案.docx
-
《山东省中小学教师职称评审表》高级教师一级教师二级教师专用A4纸正反面打印按页码装订许知忠.docx
-
《安娜卡列尼娜》读后感.docx
-
《繁星春水》读后感15篇.docx
-
《苏州市市级示范物业管理项目服务质量评价标准》 doc.docx
-
《采薇》教案.docx
-
《假如给我三天光明》阅读测试题有答案.docx
-
《小学数学教师》读书笔记精选多篇.docx
-
《给幼儿教师的一把钥匙》读书笔记.docx
-
《劳动法》教案设计.docx
-
《综合基础知识》必看考点《刑法》含答案.docx
-
《建筑构造》考试试题及答案精华.docx
-
3套打包北师大版四年级下册英语期末单元测试题解析版.docx
-
《雷锋的微笑》观后感.docx
-
《女人故事》电视栏目策划方案1.docx
-
7万多车对比分解.docx
-
《调皮的日子》题库.docx
-
教育叙事之学前教育顶岗实习总结.docx
-
河南省二级建造师《建设工程施工管理》模拟考试II卷 附答案.docx
-
河南省对口升学录取院校word版本.docx
-
精品解析河北省保定市竞秀区中考二模语文试题解析版.docx
-
监理规划范本.docx
-
江西省公务员考试行测真题.docx
-
吉林省吉林大学附属中学届高三第六次摸底考试语文试题.docx
-
护理工作五年中长期发展规划.docx
-
会计核算基本原理.docx
-
冀教版七年级英语下册Unit6Seasons全单元教案.docx
-
建筑测量组.docx
-
关于五门十变配穴法五门十变配穴法汇总.docx
-
教学策略的选择.docx
-
基础护理学 第十三章及第十六章试题及答案.docx
-
家长对孩子的寄语大全.docx
-
计划财务工作总结多篇范文与计划财务部度工作总结汇编.docx
-
焦化厂停电事故应急预案.docx
-
高一物理人教版必修1基础知识填空集锦.docx
-
家庭农场规章制度.docx
