 2机械控制工程基础第二章答案.docx
2机械控制工程基础第二章答案.docx
- 文档编号:24728453
- 上传时间:2023-06-01
- 格式:DOCX
- 页数:26
- 大小:593.48KB
2机械控制工程基础第二章答案.docx
《2机械控制工程基础第二章答案.docx》由会员分享,可在线阅读,更多相关《2机械控制工程基础第二章答案.docx(26页珍藏版)》请在冰豆网上搜索。
2机械控制工程基础第二章答案
Forpersonaluseonlyinstudyandresearch;notforcommercialuse
习题
2.1什么是线性系统?
其最重要的特性是什么?
下列用微分方程表示的系统中,x。
表示系统输出,X表示系统输入,哪些是线性系统?
(1)Xo2XoXo2x^2Xi⑵Xo2Xo2tXo=2Xi
(3)Xo2Xo2x^2Xi⑷Xo2XoXo2tx^2Xi
解:
凡是能用线性微分方程描述的系统就是线性系统。
线性系统的
一个最重要特性就是它满足叠加原理。
该题中
(2)和(3)是线性系统。
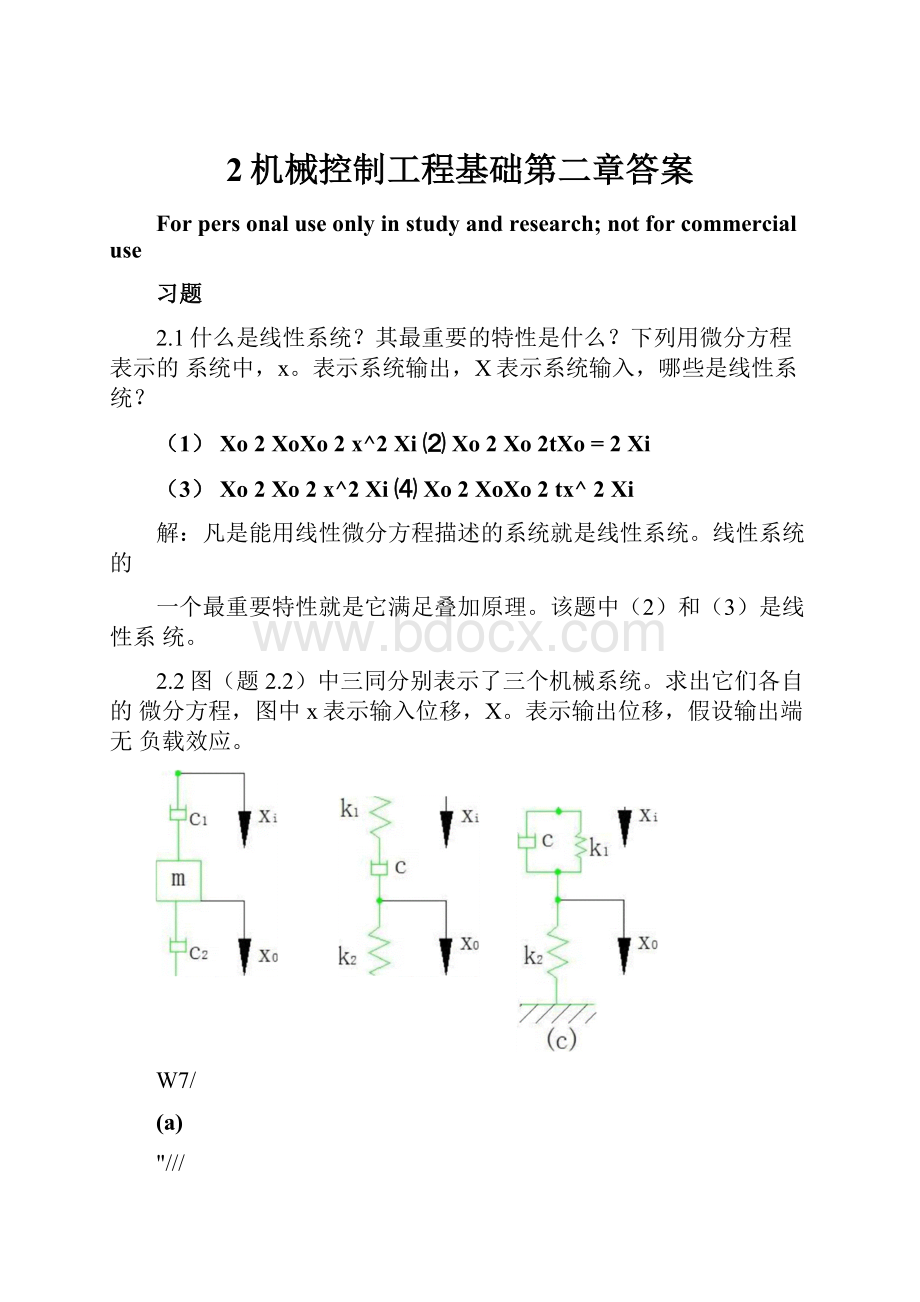
2.2图(题2.2)中三同分别表示了三个机械系统。
求出它们各自的微分方程,图中x表示输入位移,X。
表示输出位移,假设输出端无负载效应。
W7/
(a)
"///
(b)
图(题2.2)
解:
(1)对图(a)所示系统,由牛顿定律有
ci(XX。
)px。
二mx。
即mx。
(°C2)x。
二ciXi
(2)对图(b)所示系统,弓1入一中间变量
(Xj-x)k厂c(x-x。
)
X,并由牛顿定律有
(1)
c(x-x°)=kzx。
(2)
消除中间变量有
c(ki-k2)x。
-kik2Xo=ckiXi
(3)对图(c)所示系统,由牛顿定律有
c(X一x。
)ki(x一x。
)=k2x。
1cx/(ki+k2)*=cx+kiXi
2.3求出图(题2.3)所示电系统的微分方程。
Ri
Ri
Ui
(a)
Ui
图(题2.3)
cl?
Rr
Un
解:
⑴对图(a)所示系统,设i1为流过r的电流,i为总电流贝S有
叶R2i*
u-u。
二Riii
1..u「u。
(i-ijdt
C1
消除中间变量,并化简有
1
CR2u。
C2R1ui
CRu。
(1gC1)u。
-
R2C2
=C1R2u;+(昏+g)
⑵对图(b)所示系统,设i为电流,则有
1ui二u。
Riidt
C1
1u。
idtR2i
C2
1i
(RR2)u。
它©
消除中间变量,并化简有
1)u。
二R2」ui
C2
2.4求图他2.4)所示机械系统的微分方程。
图中M为输入转矩,Cm为圆周阻尼,J为转动惯量。
0$匚題A4)
解:
设系统输入为M(即)输出日(即),分别对圆盘和质块进行动
力学分析,列写动力学方程如下:
M=JC^Rk(R-x)k(R-x)=mxex
消除中间变量x,即可得到系统动力学方程
mJ⑷(mCmcJ)二(Rkm6c-KJ)二k(eRCm)
二mMcMKM
2.5输出y(t)与输入x(t)的关系为y(t)二2x(t)+0.5x'(t)。
(1)求当工作点为为=°,冷=1,冷=2时相应的稳态时输出值;
(2)在这些工作点处作小偏差线性化模型,并以对工作的偏差来定
义x和y,写出新的线性化模型。
解:
(1)将xo=0,xo=1,Xo=2分别代入y(t)=2x(t)+0.5x3(t)中,即当工作点为Xo=°,x0=l,x0=2时相应的稳态输出值分别为yo=0,y产2.5,y°=8。
(2)根据非线性系统线性化的方法有,在工作点(xo,yo)附近,将
非线性函数展开成泰勒级数,并略去高阶项得
32
y。
'y二2x。
0.5x。
(21.5x)|x=x八x
z2、■
7y=(2+1.5x)lx=x「wx
若令x=nY有y=(21.5x:
)x
当工作点为冷=0时,y=(21.5x0)x=2x
当工作点为*=1时,y=(21.5x0)x=3.5x
当工作点为冶=2时,y=(2■1.5x:
)x=8xbp
2.6已知滑阀节流口流量方程式为Q=CWXJf,式中.Q为通过
节流阀流口的流量;p为节流阀流口的前后油压差;xv为节流阀的位移量;c为疏量系数;w为节流口面积梯度;「为油密度。
试以Q与p为变量(即将Q作为P的函数)将节流阀流量方程线性化。
解:
利用小偏差线性化的概念,将函数Q=F(xv,p)在预定工作
点F(x。
,P。
)处按泰勒级数展开为
吓„.cFe…
Q-F(Xvo,Po)+()(Xvo,Po)・Xv(£p)(Xvo,Po)・p+
^Xv
消除高阶项,有
CFcF
Q_F(Xvo,Po)()(Xvo,Po)NXv十(如)(Xvo,Po)*NP
£XvP
.:
F
'Q=F(xv,p)-F(xvo,po)
=F(Xvo,Po)+()|(Xvo,po)NXv十(_^P)(Xvo,Po)Np_F(Xvo,po)
^Xv
£FcF
=()(Xvo,Po)•可Xv*(_^p)(Xvo,Po)*灯p
cFdF
若令k-(J5p。
),"(V)l(Xvo,po),
"Q=八XvK2八p
将上式改写为增量方程的形式
Q二Ki%K^p
2.7已知系统的动力学方程如下,试写出它们的传递函数
Y(s)/R(s)。
(1)y(t)15y(t)50y(t)500y(t)=r(t)2r(t)
(2)5y(t)25y(t)二0.5r(t)
(3)y(t)25y(t厂0.5r(t)
(4)y(t)3y(t)6y(t)4y(t)dt二4r(t)
解:
根据传递函数的定义,求系统的传递函数,只需将其动力学方程两边分别在零初始条件下进行拉式变换,然后求Y(s)/R(s)。
322
sY(s)15sY(s)50sY(s)500丫(s)=sR(s)2sR(s)
「2s
Y(s)/R(s)=22
s+15s2+50s+500
2
5sY(s)25sY(s)=0.5sR(s)
0.5s
Y(s)/r(s)=宀
2
sY(S)25SY(s)=0.5R(s)
丫(S)/R(s)=s20:
足
s2Y(s)3sY(S)6丫(s)41Y(s)-4Y(s)
s
4s
Y(S)/R(S)s33s26s4
2.8如图(题2.8)为汽车或摩托车悬浮系统简化的物理模型,
试以位移x为输入量,位移y为输出量,求系统的传递函数Y(s)/X(s)。
ktbc
I
IT1iiki
/V\/\
图(题2.8)
2.9试分析当反馈环节H(s)=1,前向通道传递函数G(s)分别为惯
性环节、微分环节、积分环节时,输入、输出的闭环传递函数。
解:
由于惯性环节、微分环节、积分环节的传递函数分别为
(1)当反馈环节H(s)=1,前向通道传递函数G(s)为惯性环节时,
⑵当反馈环节H(s)=1,前向通道传递函数G(s)为微分环节时,
(3)当反馈环节H(s)=1,前向通道传递函数G(s)为积分环节时,
2.10证明图(题2.10)与图(题2.3(a)所示系统是相似系统
O
VX?
7777/
图(题2.10)
(即证明两系统的传递函数具有相同形式)
解:
对题2.4(a)系统,可列出相应的方程。
1
叶R2^idt
s一Riii
1u「u。
」(i—ii)dt(3)
Ci
对以上三式分别作Lapice别换,并注意到初始条件为零,即
I(0)=1(0)=0|i(0)「2(0)=0
Ui(s)u(s)3血
CisCis
贝y
11R
⑸沃,得——Ui(s)—Uo(s)〒旦li(s)(7)
CisCis」-Cis
(6)Ri,得RiUi(s)-Uo(s)二Ril⑸-Ri|i(s)(8)
」」CisCis
(7)+(8),得(丄+Ri)U(s)70(9]=鱼1(s)
Cis」「Cis
(9)
l(s)
Ui(s)=Uo(s)—R^l(s)
iRiCi
将(4)式中的U0(S)代入(9)式
Ui(s)=(R2=)l(s)iRiCi
=他+「+十鼻)l(s)
C2Si+RiCis
i
(R2——)l(s)C2S
Ri
再用(4)式与上式相比以消去l(s),即得电系统的传递函数为
~、Uo(s)
G(s)i
Ui(s)(R2—")l(s)
C2S(VRiCis)
1R2C2S
c+1+Ri
R2C2S(1R1C1S)
而本题中,引入中间变量x,依动力学知识有
(Xi-Xo)k/(Xi-Xo)cr(xo-x)q
(幷-Xo)G=k1X
对上二式分别进行拉式变换有
k2]Xi-X0(s)[+sc2収i(s)-Xo(s)]=Xo(s)-X(s)
X(s)严X0(s)鶯k1+c1S
消除X(s)有
+_k2
Xo(s)k2C2SC2s
G(s)Xi(s)k2C2s座
k1C1SC2s1C1s
k1
比较两系统的传递函数有
11
k2k1bR20=R1
C2C1
故这两个系统为相似系统。
2.11一齿轮系如图(题2.11)所示。
图中,Z1、Z2、Z3和Z4分别
为各齿轮齿数;J1、J2、和J3表示各种传动轴上的转动惯量,卄、二2和二3为各轴的角位移;Mm是电动机输出转矩。
试列写折算到电动轴上的齿轮系的运动方程。
图(题2.11)
2.12求图(题2.12)所示两系统的传递函数。
(a)
图(题2.12)
解:
(1)由图(a)中系统,可得动力学方程为
]x(t)-xo(t)mXo(t)+cxo(t)
作Laplce别换,得
]Xi(s)-x°(s)]k=ms2X°(s)+csXo(s)则有G(sXXo(s)/Xi(s)=k/(ms2csk)
(2)由图(b)中系统,设i为电网络的电流,可得方程为
ui=Ri+Ldt+Jidt
idt
作Laplce别换,得
1
Ui(s)=RI(s)Lsl(s)I(s)Cs
1Uo(s^—I(s)Cs
2.13某直流调速系统如图(题2.13)所示,Us为给定输入量,电动机转速n为系统的输出量,电动机的负载转矩Tl为系统的扰动量。
各环节的微分方程:
比较环节
V
5二Us-Ufn
比例调节器
Uc=K「Un(Kk为放大系数)
电动机电枢回路u^iaRd,Ld^e
(Rd为电枢回路电阻id为电枢回路电感,ia为电枢电流)
电枢反电势e=Kdn(Kd为反电势系数)
电磁转矩Me-Kmia(K"为转矩系数)
负载平衡方程Me^jG^rTL(Jg为转动惯量,Tl为负
dt
载转矩)
测速电动机Ufn八nG为转速反馈系数)
试根据所给出的微分方程,绘制各环节相应的传递函数方框图和
N(s)
「(s)
图(题2.13)
2.14试绘制图(题2.14)所示机械系统传递函数方框图。
ki>
TH
Xo
Hl
c:
t~
7777/]
CC
Xo-建三
(a)
777刀
图(题N14)
(1)求以R(s)为输入,当N(s)=O时,分别以C(s)、Y(s)、B(s)、E(s)为输出的闭环传递函数;
(2)求以N(s)为输入,当R(s)=0时,分别以C(s)、
Y(s)、B(s)、E(s)为输出的闭环传递函数;
⑶比较以上各传递函数的分母,从中可以得出什么结论?
图(题2.15)
解:
(1)求以R(s)为输入,当N(s)=O时:
若以C(s)为输出,有
_/-、C(s)Gi(s)G2(s)
GC(s)==
R(s)1+Gi(s)G2(s)H(s)
若以丫(s)为输出,有
丫(s)_Gi(s)
R(s)1Gi(s)G2(s)H(s)
若以B(s)为输出,有
Gb(s)二
B(s)Gi(s)G2(s)H(s)
R(s)「1Gi(s)G2(s)H(s)
若以E(s)为输出,有
GeG)二
E(s)_1
R(s)1Gi(s)G2(s)H(s)
⑵求以N(s)为输入,当R(s)=O时:
若以C(s)为输出,有
Gc(s)二
C(s)G2(s)
R(s)[Gi(s)G2(s)H(s)
若以丫(s)为输出,有
若以B(s)为输出,有
Gb(s)=
B(s)G2(s)H(s)
Rsf1Gi(s)G2(s)H(s)
若以E(s)为输出,有
Ge(s)二
E(s)-G2(s)H(s)
R(s「1Gi(s)G2(s)H(s)
⑶从上可知:
对于同一个闭环系统,当输入的取法不同时,前
向通道的传递出数不同,反馈回路的传递函数不同,系统的传递函数
也不同,但系统的传递函数的分母保持不变,这是因为这一分母反映了系统的固有特性,而与外界无关。
2.16已知某系统的传递函数方框图为图(题2.16),其中,
Xi(S)为输入,Xo(S)为输出,N(s)为干扰,试问:
G(s)为何值时,
系统可以消除干扰的影响
L
图(题2.16)
解:
方法一:
根据线性系统的叠加原理,令Xi(S)=O,N(s)为输
入,系统的输出为
X°n(s)=N(s)Gib(s)G(s)-K4G2b(s)]
其中
K3
X°n(s)二N(s)G1b(s)G(s)-K4G2b(s)]
-K41
K1K2K3G(s)——s
1K1K2J
2
TssK1K2K3
G(s)二K4s
K1K2
方法二:
令Xi(S)=0,N(s)为输入,贝卩系统的传递函数方框图可以表示成图(题2.16.b)所示。
Tf+:
图(题2.16.b)
根据相加点前后移动的规则可以将其进一步简化成图(题2.16.
c)和图(题2.16.d)所示的形式。
图(题2.16.C)
N3
3
3
-■..心
图(题2.16.d)
因此,系统在N(s)为输入时的传递函数为
-K41
Gn(s)
K1K2K3G(s)—s
IIK1K2
2
Ts2sK1K2K3
同样可得G(s)=^ds时,系统可消除干扰的影响。
K1K2
2.17系统结构如图(题2.17)所示,求系统传递函数。
E(题2.17)
E(<2.17>
图(®2.17)
Xo(s)
Gb(s)=
G1G2G3G4
Xi(S)1_G1G2G3G4H3G1G2G3H2一G2G3H1G3G4H4
方法二:
利用方框图简化规则,有图(题2.18.b)
L.GGG
图(题2.18.b)
G1G2G3G4
1-G1G2G3G4H3G1G2G3H2~G2G3H1G3G4H4
2.19求出图(题2.19)所示系统的传递函数Xo(s)/Xi(s)
—rHY
图(题2.19)
解:
根据方框图简化规则,有图(题2.19.b)
图(题2.19.b)
G1G2G3+G4
1(G[G2G3G4)H3-G1G2G3H1H2
2.20求出图(题2.20)所示系统的传递函数Xo(s)/Xi(s)
图(题2.20)
解:
根据方框图简化规则,有图(题2.20.b)
图(题2.20.b)
Xi(s)1G1G2H1G3(1G3G4)GlG2G5_G2G3H2
2.21设描述系统的微分方程为
(1)y2yy=0⑵y2yy=A
试导出系统的状态方程。
2.22RLC电网络如图(题2.22)所示,u(t)为输入,流过电阻r2的电流i2为输出,试列写该网络的状态方程及输出方程。
R】LlLi
图(題Z22)
2.23系统传函数方框图为图(题2.23),试列写该系统的状态方程及输出方程。
图(题2.23)
2.24图(题2.24)为某一级倒立摆系统示意图。
滑台通过丝杠传动,可沿一直线的有界导轨沿水平方向运动;摆杆通过铰链与滑台连接,可在沿直线平面内摆动。
滑台质量为M,摆杆质量为m,摆杆转动
惯量为J,滑台摩擦系数为c,摆杆转动轴心到杆质心的长度为L,加在滑台水平方向上的合力为u,滑台位置为x,摆杆与铅直向上的夹角为
(1)以口为输入,「为输出,列写系统的微分方程;
(2)求系统的传递函数;
(3)试列写该系统的状态方程及输出方程。
d
u
z
Vf
一Cx
*
M
■
7/////////〃/
图(题2.24)
仅供个人用于学习、研究;不得用于商业用途
Forpersonaluseonlyinstudyandresearch;notforcommercialuse.
Nurfurdenpers?
nlichenfurStudien,Forschung,zukommerziellenZweckenverwendetwerden.
Pourl'etuetelarechercheuniquementadesfinspersonnelles;pasadesfinscommerciales.
to员bkog^A.nrogeHKOTOpMeno^b3ymrnflCH6yHeHuac^egoBuHHuefigo^^HM
ucno员B30BaTbCEbKOMMepqeckuxqe员ex.
仅供个人用于学习、研究;不得用于商业用途
Forpersonaluseonlyinstudyandresearch;notforcommercialuse.
Nurfurdenpers?
nlichenfurStudien,Forschung,zukommerziellenZweckenverwendetwerden.
Pourl'etudeetlarechercheuniquementadesfinspersonnelles;pasadesfinscommerciales.
to员bkog^A.nrogeHKOTOpMeno^b3ymrnflCH6yHeHuac^egoBuHHuefigo^^HM
UCnO员B30BaTbCE
bKOMMepqeckux
ue贝ex.


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 机械 控制工程 基础 第二 答案
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《包装概论》课后习题汇总.docx
《包装概论》课后习题汇总.docx
-
《贝多芬传》读书笔记1000字.docx
-
《建筑工程管理与实务》模拟试题一.docx
-
《偷影子的人》读书笔记1500字.docx
-
6小摄影师.docx
-
10教育学.docx
-
32政府的责任.docx
-
202X事业单位会计年终工作总结doc.docx
-
《风中之叶》语言.docx
-
《青田县国民经济与社会发展第十二个五年规划纲要》目标任务分解实施方案.docx
-
《富饶的西沙群岛》教材理解.docx
-
《522 平行线的判定》教案导学案同步练习.docx
-
《情绪管理与职场减压》知识点.docx
-
《国际货物销售合同公约》的规定没有涉及的法律问题是.docx
-
《庄子故事两则》教案设计.docx
-
《社戏》导学案与答案.docx
-
3台球实用功法已整理.docx
-
06分析题GSM.docx
-
9A文水利工程质量保证体系及保证措施.docx
-
18年安徽师范大学中国文化概论本科教学大纲.docx
-
23届 复赛 试题+答案.docx
-
100以内加减综合混口算卡.docx
-
HighAccuracyOpticalFlowEstimationBasedonaTheoryforWarping课案.docx
-
js定义的函数和数组.docx
-
KV柱上断路器安装标准化作业流程图及指导书.docx
-
《儿童美术用品通用安全技术要求》.docx
-
《传感器及其应用》第二章习题答案.docx
-
《敬业与乐业》练习题1.docx
-
《钨行业规范条件》.docx
-
4s店技术经理工作总结工作范文.docx
-
7A版幼儿文学教案.docx
-
《给教师的建议》读书笔记1000字.docx
-
生化复习简答题与论述题.docx
-
我为班级添光彩主题班会教案.docx
-
篮球吉巷中心小学乡村少年宫活动记录.docx
-
唐河县可行性研究报告下载编辑.docx
-
开发客户话术之一.docx
-
浙江新高考选考政治选修知识点.docx
-
平安工地评价标准.docx
-
全危险化学品经营单位安全管理人员模拟考试题库附答案.docx
 二年级防校园欺凌班会.pptx
二年级防校园欺凌班会.pptx
-
南宁储罐露天制作安全技术措施及施工方案1.docx
-
核电站的工作原理和结构.docx
-
建筑工程材料进场审核要求.docx
-
农业技术市场经典招商方案.docx
-
化工制图习题集答案27512.docx
-
加热炉自动化说明书培训文件.docx
-
企业人力资源组织结构图.docx
-
禁毒宣传月活动方案完整版.docx
-
建设工程施工合同补充协议样本.docx
-
山西省太原市志达中学校学年八年级上学期月考数学试题.docx
