 方向观测法.docx
方向观测法.docx
- 文档编号:24703130
- 上传时间:2023-05-31
- 格式:DOCX
- 页数:16
- 大小:247.74KB
方向观测法.docx
《方向观测法.docx》由会员分享,可在线阅读,更多相关《方向观测法.docx(16页珍藏版)》请在冰豆网上搜索。
方向观测法
§3.6方向观测法
根据水平角观测操作基本规则,可制定出不同的观测方法,不论哪种观测方法均应能有效地减弱各种误差影响,保证观测结果的必要精度;操作程序要尽可能的简单、有规律,以适应野外作业。
不同等级的水平角观测的精度要求不同,其观测方法也不同。
当前三、四等以下的水平角观测采用“方向观测法”。
有时,二等三角观测也使用方向观测法。
3.6.1什么是方向观测法
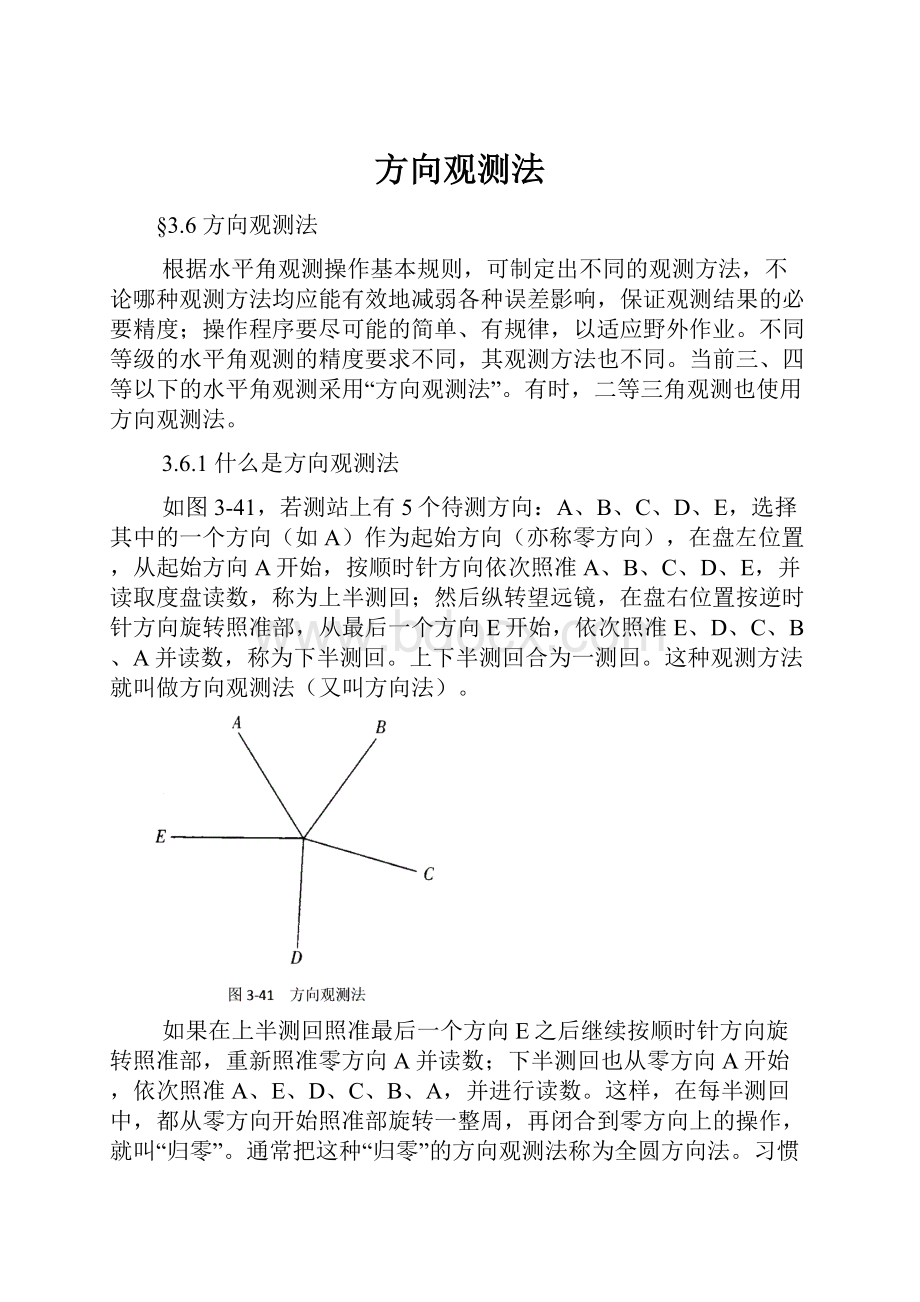
如图3-41,若测站上有5个待测方向:
A、B、C、D、E,选择其中的一个方向(如A)作为起始方向(亦称零方向),在盘左位置,从起始方向A开始,按顺时针方向依次照准A、B、C、D、E,并读取度盘读数,称为上半测回;然后纵转望远镜,在盘右位置按逆时针方向旋转照准部,从最后一个方向E开始,依次照准E、D、C、B、A并读数,称为下半测回。
上下半测回合为一测回。
这种观测方法就叫做方向观测法(又叫方向法)。
如果在上半测回照准最后一个方向E之后继续按顺时针方向旋转照准部,重新照准零方向A并读数;下半测回也从零方向A开始,依次照准A、E、D、C、B、A,并进行读数。
这样,在每半测回中,都从零方向开始照准部旋转一整周,再闭合到零方向上的操作,就叫“归零”。
通常把这种“归零”的方向观测法称为全圆方向法。
习惯上把方向观测法和全圆方向法统称为方向观测法或方向法。
当观测方向多于3个时,采用全圆方向法。
“归零”的作用是:
当应观测的方向较多时,半测回的观测时间也较长,这样在半测回中很难保持仪器底座及仪器本身不发生变动。
由于“归零”,便可以从零方向的两次方向值之差(即归零差)的大小,判明这种变动对观测精度影响的程度以及观测结果是否可以采用。
采用方向观测法时,选择理想的方向作为零方向是最重要的。
如果零方向选择的不理想,不仅是观测工作无法顺利进行,而且还会影响方向值的精度。
选择的零方向应满足以下的条件:
第一,边长适中。
就是说,与本点其他方向比较,其边长既不是太长,又不是最短。
第二,成像清晰,目标背景最好是天空。
若本点所有目标的背景均不是天空时,可选择背景为远山的目标作为零方向。
另外,零方向的相位差影响要小。
第三,视线超越或旁离障碍物较远,不易受水平折光影响,视线最好从觇标的两橹柱中间通过。
有些方向虽能满足上述要求,但经常处在云雾中,也不宜选作零方向。
当需要分组观测时,选择零方向更要慎重,以保证各组均使用同一个零方向。
3.6.2观测方法
1.观测度盘表
为了减弱度盘和测微盘分划误差影响,应在开始观测前编出观测度盘表。
零方向各测回度盘位置按下式计算:
、
型仪器
(3-36)
型仪器
(3-37)
式中m——测回数;
j——测回序号(j=1,2,3,…,m)。
按上式计算得的零方向,各测回度盘表如表3-8。
采用方向观测法时,可根据测站点的等级和仪器类型,遵守表列测回数规定,并按表3-8配置各测回零方向的度盘和测微器位置,不需要重新编制观测度盘表。
表3-8方向观测度盘
等级
二等
三等
四等
仪器
J07型
J1(T3)型
J07型
J1(T3)型
J2(T2、010)型
J07型
J1(T3)型
J2(T2、010)型
测回数
12
°′
15
°′
6
°′
9
°′
12
°′
4
°′
6
°′
9
°′″
Ⅰ
00002g
00002g
00005g
00003g
00025
00008g
00005g
00033
Ⅱ
150407
120406
300415
200410
151115
450423
300415
201140
Ⅲ
300812
240810
600825
400817
302205
900838
600825
402247
Ⅳ
451217
361214
901235
601223
453255
1351253
901235
603353
V
601622
481618
1201645
801630
604345
1201645
804500
Ⅵ
752027
602022
1502055
1002037
755435
1502055
1005607
Ⅶ
902432
722426
1202443
900525
1200713
Ⅷ
1052837
842830
1402850
1051615
1401820
Ⅸ
1203242
963234
1603257
1202705
1602927
Ⅹ
1353647
1083638
1353755
Ⅺ
1504052
1204042
1504845
Ⅻ
1654457
1324446
1655935
XⅢ
1444850
XⅣ
1565254
XV
1685658
2.一测回操作程序
(1)照准零方向标的,按观测度盘表配置测微盘和度盘。
(2)按顺时针方向旋转照准部1~2周后,精确照准零方向标的,读取水平度盘和测微盘读数(重合对径分划线两次,读取水平度盘读数一次,读取测微盘读数两次)。
(3)顺时针方向旋转照准部,精确照准2方向标的,按
(2)款方法进行读数,继续按顺时针方向旋转照准部,依次精确照准3,4,…,n方向标的并读数,最后闭合至零方向(当观测的方向数小于3时,可以不“归零”)。
(4)纵转望远镜,按逆时针方向旋转照准部1~2周后,依次精确照准1,n,…3,2,1方向标的,并按
(2)款读数方法进行读数。
以上操作为一测回,方向观测测回数见表3-9。
表3-9方向法观测的测回数
仪器类型
等级
二等
三等
四等
J1型
J2型
15
9
12
6
9
3.观测手簿的记录与计算
表3-10所列结果,是使用
型经纬仪进行二等方向观测一测回的手簿记录、
计算示例。
因为观测顺序是:
上半测回为l,2,3,4,1,下半测回为1,4,3,2,1,所以手簿“读数”栏中两个半测回的记录也必须与之相应,即上半测回由上往下,下半测回由下往上记录。
每照准一次,重合读数两次,取两次测微盘读数之平均值作为这次照准的秒读数。
再取盘左盘右观测的平均值。
然后将各方向的观测值减去1号方向的观测值,得到归零之后的方向值。
例如3号方向值为:
用
型经纬仪进行三等方向观测一测回的手簿记录、计算见表3-11。
与表3-10只有两点不同:
一是小数位规定不同;二是测微盘两次读数之结果不是取平均值,而是取其和作为此次照准的秒读数。
3.6.3观测结果的选择
1.观测限差
观测结果中,有一些数值在理论上应该满足一定的关系。
例如,同一个方向各测回的方向值应相同;归零差应为零等。
由于各种误差的影响,实际上是不可能的。
为了保证观测结果的精度,利用它们理论上存在的关系,通过大量的实践验证,对其差异规定出一定的界限,称为限差。
在作业中用这些限差检核观测质量,决定成果的取舍。
在限差以内的结果,认为合格;超限成果,则不合格,应舍去重新观测。
方向观测法中的限差规定见表3-12。
表3-12中的限差规定是经过长期作业实践和周密理论分析而总结出来的,只要作业人员严格按照作业规则操作,在正常的外界条件下,这些限差指标是完全能够满足的。
另外限差是对观测质量的最低要求,作业人员不应满足于观测成果不超限,而应努力提高技术水平,严格遵守操作规则,认真分析误差影响(尤其是系统误差)的因素,采取相应的措施,在不增加作业时间的前提下,最大限度地消除或减弱其影响,尽可能的提高观测成果质量。
表3-12方向观测法限差规定
序号
项目
二等
三等
四等
J07型
J1型
J07型
J1型
J2型
J07型
J1型
J2型
″
″
″
″
″
″
″
″
1
光学测微器两次重合读数之差
1
1
1
1
3
1
1
3
2
半测回归零差
5
6
5
6
8
5
6
8
3
一测回内2C互差
9
9
9
9
13
9
9
13
4
不纵转望远镜时,同一方向值在一测回中上、下半测回之差
6
—
6
—
—
6
—
—
5
化归同一起始方向后,同一方向值各测回互差
5
6
5
6
9
5
6
9
6
三角形最大闭合差
3.5″
7.0″
9.0″
2.观测结果的取舍
为了保证观测成果质量,凡是超限成果都必须重测。
但超限的具体情况比较复杂,究竟应该重测哪个,要根据观测的实际情况,仔细地分析,合理地确定其取舍。
任何主观臆断或盲目重测都可能造成观测结果的混乱,影响成果质量。
判定重测时注意:
第一,超限现象是有其规律可循的。
观测结果中的主要误差是偶然误差,它是按其自身的规律性出现的,因此在成果取舍时,要根据偶然误差的特性加以判断。
同时也要根据观测时的具体条件,注意分析系统误差的影响,合理地确定取舍。
第二,在判断重测时应仔细分析造成超限的真正原因。
客观原因,如仪器、目标成像、水平折光等;主观原因,如操作、照准、观测时间的选择等。
假如判定有错误,将会直接影响成果质量,甚至会造成全部重测。
第三,判定重测的方法只是一些基本原则,不可能是包罗万象的公式。
在具体处理时,凡不易判定或把握不大时,要注意从严处理,以避免漏洞。
测回互差超限时,除明显的孤值外,应重测观测结果中最大和最小值的测回,这是判定重测的基本原则。
依此原则,介绍几种判定重测的方法。
(1)“测回互差”超限。
出现明显的过大或过小之孤值
例如用北光厂J07光学经纬仪进行三等水平角观测,某方向各测回的观测秒值如下:
显然Ⅳ测回的31.3″过大,其他各测回秒值都很接近。
因此认为Ⅳ测回的结果是不正常的,属于孤值,可仅重测此测回。
所以,①当某一测回秒值与其他测回秒值相差较大,测回互差超限,而其他各测回秒值很接近,舍去此测回后,其他各测回的互差均合限,该测回可作孤值处理;②对于不是明显的孤值,不易判断时,可按“一大一小”进行重测。
(2)“测回互差”超限,出现“一大一小”
例如用T2,经纬仪进行三等水平角观测,某一方向的观测结果如下:
其中26.2″较小,36.1″较大,两者互差超限,仅舍去26.2″时,其他各测回合限,仅舍去36.1″时,其他各测回互差也合限。
此时可认为36.1″与26.2″属于“一大一小”,应重测这两测回。
测回互差超限出现“一大一小”,重测时可能出现这样几种情况:
一是大的变小,小的变大,二者的互差合限,这时采用重测结果;二是大的仍大,小的变大,与大的基本测回结果合限,这时大的采用基本测回结果,小的采用重测结果;三是小的仍小,大的变小,这时的处理方法与第二种基本情况相同。
(3)“测回互差”超限,出现“两小一大”(或两大一小)
例如用010经纬仪进行三等三角观测,某方向的观测结果如下:
其中13.3″与23.8″互差超限;14.0″矿与23.8″互差也超限。
若舍去13.3″和14.0″旷,其他各测回互差合限;若舍去23.8″,其他各测回也合限。
此时可认为13.3″、14.0″与23.8″属于‘两小一大”,这三个测回均应重测。
当测回互差超限,出现“两小一大”(或“两大一小”)时,重测的方法是:
先重测最大和最小的两个测回,然后看重测结果的变化趋势;若这两个重测结果与另一个超限测回的结果互差仍较大时,则另一个测回也应重测;若很接近且合限,可不再重测。
(4)“测回互差”超限出现分群现象
例如用010经纬仪进行三等三角观测,某方向的结果是如下:
显然前5个结果接近,其数值偏小;后7个结果接近,其数值偏大。
两群的平均值互差较大,在本群内测回互差合限,两群中测回互差有些合限,有些超限。
这是明显的分群现象。
造成分群现象的主要原因是:
1)不同的观测时间段的外界条件有显著的变化。
一个时间段观测若干个测回,另一个时间段内观测其余测回,这样两时间段内所测结果互差可能较大。
2)某些方向视线超越或旁离障碍物的距离较近,产生水平折光影响,白天测得的与夜间测得的结果相差较大,造成分群。
3)照准觇标圆筒时的相位差影响。
当成果出现分群时,一定要先分析产生原因,然后根据具体情况,采取必要的措施,再重测全部测回,如果只有个别测回互差超限,可只重测超限测回。
3.重测、补测的有关规定
1)凡因对错度盘、测错方向、上半测回归零差超限、读记错误和中途发现观测条件不佳等原因放弃的非完整测回,再进行的观测通称为补测。
补测可随时进行。
因超出限差规定而重新观测的完整测回,称为重测。
重测应在基本测回全部完成之后进行,以便对成果综合分析、比较,正确的判定原因之后再进行重测。
2)采用方向观测法时,在1份成果中,基本测回重测的“方向测回数’’超过“方向测回总数”的三分之一时,应重测整份成果。
重测数的计算:
在基本测回观测结果中,重测1个方向算作1个“方向测回”;一测回中有2个方向重测,算作2个“方向测回”。
1份成果的“方向测回总数’’(按基本测回计算)等于方向数减1乘以测回数,即(n一1)m。
3)一测回中,若重测的方向数超过本测回全部方向数的三分之一,该测回全部重测。
观测3个方向时,即使有1个方向超限,也应将该测回重测。
计算重测数时,仍按超限方向数计算。
4)当某一方向的观测结果因测回互差超限,经重测仍不合限时,要在分析原因后再重
测,以避免不合理的多余重测。
5)进行重测时,只联测零方向。
6)基本测回的结果与其重测结果,一律上记簿。
每一测回只采用一个合限结果。
7)零方向超限,全测回重测。
8)中途放弃的方向,最后补测。
放弃方向数不超过全部方向数的三分之一。
9)因三角形闭合差、极璧验、基线条件和方位角条件闭合差超限而重测时,应重测整份成果。
3.6.4测站平差
在一份成果中,各个方向均观测了若干个测回,同一方向在各测回中的观测值虽然都是合限的。
但因受各种误差的影响,彼此间存在差别,不可能相等,因此就要按照一定的方法,由同方向各测回的观测值求出该方向的最可靠的方向值(又叫平差值),作为该方向的观测结果,这就叫测站平差。
这里所介绍的测站平差,是用算术中数的方法,求出各个方向的平差方向值。
即:
某一方向的平均方向值=
(3-38)
在实际作业中,测站平差计算是在固定表格——“水平方向观测记簿”上进行的,如表3-13所示。
注:
①括弧中的成果为划去不采用。
②一测回方向值的中误差
m=9k=0.147
③m个测回方向值中数中误差
n为方向数,m为测回数。
测站平差计算步骤:
(1)按表3-13的格式,从观测手簿中抄取所有观测方向的各测回方向值(超限的基本测回观测结果也抄入相应位置,并划去,表示不予采用)。
(2)按表3-13格式计算所有方向的平差方向值,取至0.1″。
(3)计算出各测回观测值与其平差值之差,已入“V”栏内。
(4)求出各个方向的V值的绝对值之和
(5)求出各个方向的
之和
(6)按公式
求出k值,式中m为本测站的测回数。
(7)按公式
求出一测回方向值的中误差u,式中n为本测站的观方向数。
(8)按公式
求出平差方向值中数的中误差M。
3.6.5方向观测法的特点及其应用范围
方向观测法有很多优点,例如,观测程序和测站平差简单,有规律;工作量较小;方向数不多时,可以有效的减弱各种误差的影响等。
在边长较短,精度要求不高时,是一种好方法。
但边较长,精度要求又很高时(如一等三角测量),方向观测法就不适用了。
因为观测长边时,要求所有的目标成像都同时清晰、稳定是很困难的。
为了等候各个目标的成像清晰、稳定,往往要浪费很多时间。
另外,由于一测回照准的目标较多,每一测回观测时间必然较长,这样,由各种外界条件引起的误差影响将会加剧,很难达到更高的精度要求。
所以,《规范》规定,方向观测法主要用于三、四等水平角观测。
进行二等水平角观测时,若观测方向数少于7个,也可采用此法。
顺便指出,按方向法观测时,若测站方向数超过7个,应进行分组方向观测。
分组观测在较早的控制测量书中有叙述。
由于现在已基本不布设三角网,本书略去此项内容。
3.6.6固定角测站平差
在高等点上设站进行低等观测时,应联测上两个高等方向。
在观测完成后,将高等方向的方向夹角作为固定值,对低等观测方向值进行平差,称为固定角平差。
其作用就是将低等方向值符合到高等方向值上。
其计算方法为:
先计算出联测角观测值与已知的固定角值之差w;再算出第一联测方向的改正数(+w/2)和第二联测方向的改正数(-w/2)。
如果零方向为已知高等方向,则把上述的改正数归零并算出平差方向值,如表3-14所示。
应当说明,上述的固定角平差计算只有在固定角闭合差合限的情况下才能进行。
若固定角闭合差超限,应分析原因,然后重测。
若重测后仍超限,应检查已知数据,以及分析判断已知点的稳定性。
固定角闭合差的限值为
式中:
为原固定角的中误差;
为本期水平角观测的中误差。
表3-14固定角测站平差
方向号
观测方向值
改正数
V
归零
平差方向值
已知方向值
备注
°′″
l
00000.0
+0.89
0.O
00000.0
381645.28
2
483215.6
-0.9
483214.7
3
761923.4
-0.89
-1.8
761921.6
1143607.44
4
1303832.8
-0.9
1303831.8
5
2165444.5
-0.9
2165443.6
W=76°19′23.4″-(114°36′07.44″-38°16′45.82″)=+1.78″


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 方向 观测
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《包装概论》课后习题汇总.docx
《包装概论》课后习题汇总.docx
-
《贝多芬传》读书笔记1000字.docx
-
《建筑工程管理与实务》模拟试题一.docx
-
《偷影子的人》读书笔记1500字.docx
-
6小摄影师.docx
-
10教育学.docx
-
32政府的责任.docx
-
202X事业单位会计年终工作总结doc.docx
-
《风中之叶》语言.docx
-
《青田县国民经济与社会发展第十二个五年规划纲要》目标任务分解实施方案.docx
-
《富饶的西沙群岛》教材理解.docx
-
《522 平行线的判定》教案导学案同步练习.docx
-
《情绪管理与职场减压》知识点.docx
-
《国际货物销售合同公约》的规定没有涉及的法律问题是.docx
-
《庄子故事两则》教案设计.docx
-
《社戏》导学案与答案.docx
-
3台球实用功法已整理.docx
-
06分析题GSM.docx
-
9A文水利工程质量保证体系及保证措施.docx
-
18年安徽师范大学中国文化概论本科教学大纲.docx
-
23届 复赛 试题+答案.docx
-
100以内加减综合混口算卡.docx
-
HighAccuracyOpticalFlowEstimationBasedonaTheoryforWarping课案.docx
-
js定义的函数和数组.docx
-
KV柱上断路器安装标准化作业流程图及指导书.docx
-
《儿童美术用品通用安全技术要求》.docx
-
《传感器及其应用》第二章习题答案.docx
-
《敬业与乐业》练习题1.docx
-
《钨行业规范条件》.docx
-
4s店技术经理工作总结工作范文.docx
-
7A版幼儿文学教案.docx
-
《给教师的建议》读书笔记1000字.docx
-
关于贵州大学新校区学生求职择业取向的调研报告.docx
-
关于证券资料经纪业务的一些思考.docx
-
管工国家职业技能鉴定标准.docx
-
光纤通信重点.docx
-
广东工业大学信息检索与利用专题检索报告范例.docx
-
广告宣传策划活动合辑8篇.docx
-
贵阳市数学高考模拟试题及答案.docx
-
国际金融习题与答案.docx
-
国家高技术产业化示范工程项目建议书.docx
-
国内盾构隧道工程事故案例分析.docx
-
国内运输合同标准版.docx
-
国信大道淮江路外环路照明工程质量评估报告.docx
-
哈利波特全集电子书哈利波特电子书.docx
-
好视通操作说明.docx
-
合规管理合规管理基础知识课程讲义汇编.docx
-
河南省成人高等教育学士学位英语考试全真模拟试题.docx
-
湖北省黄冈中春季七年级下期中考试数学试题含答案.docx
-
户外及户内游戏大全之欧阳体创编.docx
-
护理学专题讲座春期末测试.docx
