 水下管道智能巡检任务命题文档150.docx
水下管道智能巡检任务命题文档150.docx
- 文档编号:24689365
- 上传时间:2023-05-31
- 格式:DOCX
- 页数:8
- 大小:879.24KB
水下管道智能巡检任务命题文档150.docx
《水下管道智能巡检任务命题文档150.docx》由会员分享,可在线阅读,更多相关《水下管道智能巡检任务命题文档150.docx(8页珍藏版)》请在冰豆网上搜索。
水下管道智能巡检任务命题文档150
第六届湖南省大学生工程训练综合能力竞赛
The6thHunanUndergraduateEngineeringTrainingIntegrationAbilityCompetition
场景设置与任务题
参赛项目
水下管道智能巡检
队伍代号
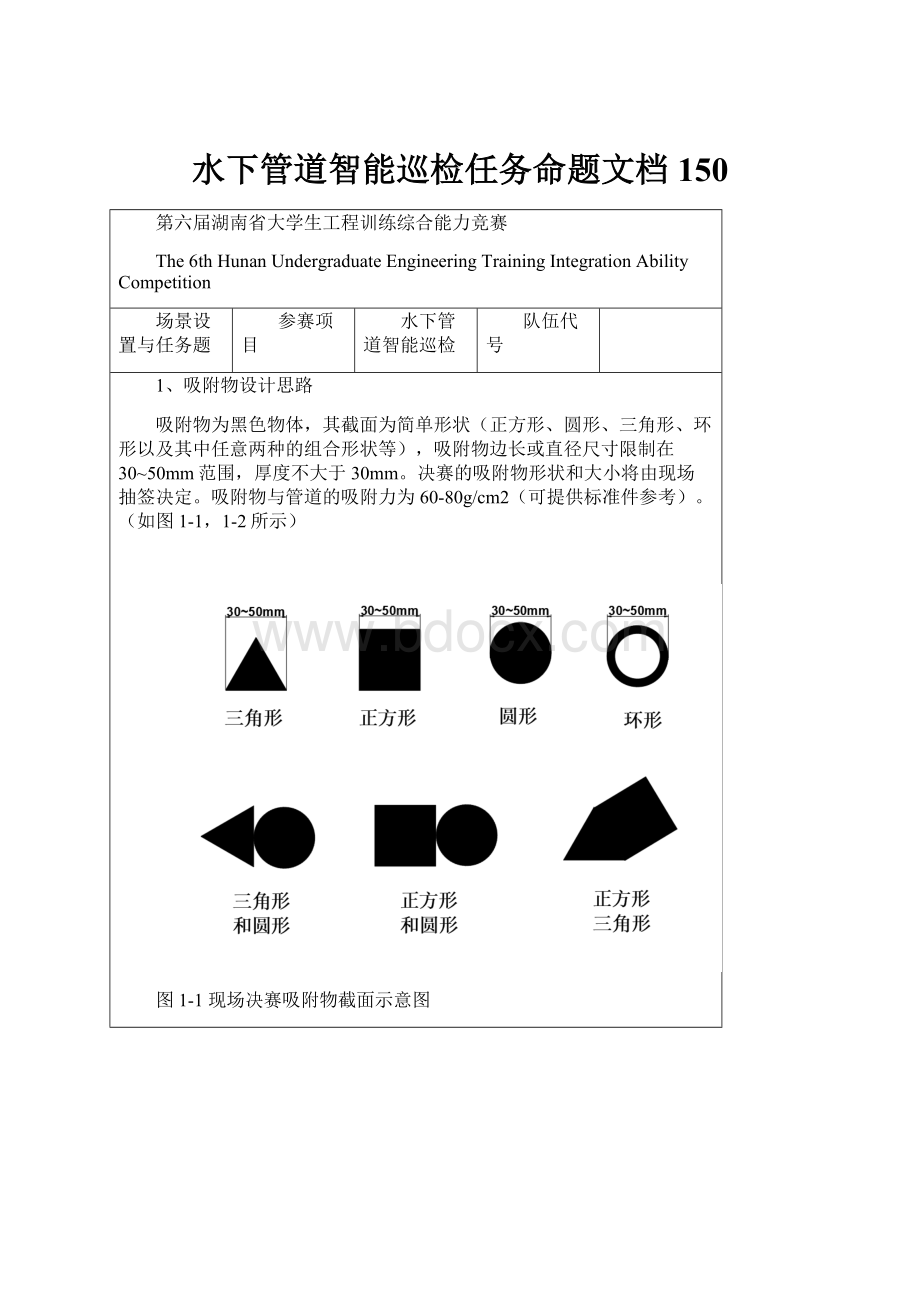
1、吸附物设计思路
吸附物为黑色物体,其截面为简单形状(正方形、圆形、三角形、环形以及其中任意两种的组合形状等),吸附物边长或直径尺寸限制在30~50mm范围,厚度不大于30mm。
决赛的吸附物形状和大小将由现场抽签决定。
吸附物与管道的吸附力为60-80g/cm2(可提供标准件参考)。
(如图1-1,1-2所示)
图1-1现场决赛吸附物截面示意图
图1-2决赛吸附物零件工程图
2、场景设计思路
1)拟规划的现场决赛的场景设计
赛场尺寸(长×宽×高)为3000×2000×600(mm)长方形水池(如图2-1所示),水面高度为460mm。
用直径φ75mm白色PVC管铺设模拟的水下管道,水下管道铺设在水池内,分浅水区、中间水区、渐变区和深水区、,即PVC管在不同区域的高度不一样。
浅水区的PVC管道的底部与水池底面的距离为210mm,深水区的PVC管道的底部与水池底面接触(即PVC管道沉于水池底部),渐变区的PVC管道一端与浅水区的PVC管道相连,一端与深水区的PVC管道相连,成倾斜状。
中间水区的PVC位置不定,介于浅水区和深水区之间,一端与深水区的PVC管道相连,一端与浅水区的PVC管道相连。
且连接中层水区和其他水区的管道采用竖直放置或者高度渐变连接。
中间水区、浅水区与渐变区管道下部均有支撑物渐变区和中层水区之间的管道铺设在出发和返回路线中的顺序是相反的。
具体铺设路线和具体不同水区的管道长度和深度均由现场抽签决定(如图2-2所示。
)
图2-1决赛水池示意图
图2-2决赛赛场管道铺设示意图
在水下管道上共设置5~15个吸附物,分布在水下管道各处。
现场决赛时,吸附物位置不限于横截面上半部分,吸附物的数量、形状和沿管道布置的位置现场抽签确定。
图2-3现场决赛吸附物布置方式示意图
出发区的水下管道上贴有黑色胶带作为比赛的出发线,如图2-3所示。
图2-3比赛场地分界线和遮挡物
2)现场初赛与现场决赛的方案对比分析
(1)初赛决赛的相同点:
运行场地相同:
赛场尺寸(长×宽×高)为3000×2000×600(mm)长方形水池(如图14所示),水面高度为460mm。
轨迹铺设材料相同;均使用直径φ75mm白色PVC管铺设模拟的水下管道,水下管道铺设在水池内。
(2)初赛决赛的不同点:
管道铺设水区不同:
初赛时管道铺设区域只分浅水区、渐变区和深水区,(PVC管在不同区域的高度不一样),而决赛时增加为浅水区、中层水区,深水区,渐变区。
管道铺设轨迹不同:
初赛时,比赛场地左侧虚线方框内分别为出发区和返回区。
且管道铺设路线确定,轨迹已知。
决赛时,出发区和返回区的位置,浅水区、中间水区、深水区的PVC管道的位置、管道底部与水池底面的距离均由现场确定,轨迹不定。
吸附物位置不同:
现场初赛时,吸附物全部位于水下管道横截面上半部分的任意位置(如图2-4所示),吸附物的数量和沿管道布置的位置现场抽签确定,吸附物的最小间距为500mm。
现场决赛时,吸附物位置不限于横截面上半部分,且不仅限于管道上,2~3个吸附物会被安排在深水区管道的附近,粘在水池底面,与管道表面距离不大于10mm,吸附物的数量和沿管道布置的位置现场抽签确定。
图2-4现场初赛吸附物布置方式示意图
3、移除和回收机构设计
1)移除机构设计思路及原理
(1)移除机构设计思路:
移除机构采用舵机控制自制机械手的张开和闭合,以实现对于障碍物的抓取和移除。
所述自制机械手通过在竖直平面内的齿轮啮合实现机械手夹取动作,而机械手与被抓取物的接触部位采用延展平面增大与障碍物的接触面积,以实现在有限高度内对于障碍物的有限夹取和移除。
(2)移除机构设计原理:
当管道上有障碍物出现在摄像头的视野范围内时,摄像头将采集管道信息反馈给树莓派,树莓派和STM32进行交互通信,传递当前道路信息和障碍物位置,STM32根据收到的信息做出相应调整以实现机械抓手对于障碍物的定位、抓取、移除。
以实现对驱动系统和舵机的控制,从而使机械手能在合适位置夹取到障碍物并有效移除。
(如图3-1所示)
图3-1移除机构设计示意图
2)回收机构设计思路及原理
(1)回收机构设计思路:
让回收装置位于水下机器人尾部,与机械手在水下机器人正投影下方的相对位置,在机械手夹取障碍物后,回收装置对角旋转180度到机械手正下方接到机械手释放的障碍物,再按照原路线返回,即完成回收动作。
(2)回收机构设计原理:
回收机构设计主要通过控制机械手和回收装置的两舵机的分时工作和配合。
所述回收机构,采用舵机180度对转,所述控制回收装置的舵机,默认让回收装置位于水下机器人的正投影下方的尾部,回收装置的中心与机械手中心位于同一竖直平面内。
当机械手有效夹取障碍物之后,使回收装置对转180度,回收装置中心恰好位于机械手中心的正下方,此时机械手释放障碍物,落入回收装置,回收装置按照原路线返回,回到初始位置,保持默认状态直至下一此机械手的有效抓取完成,改变状态。
(如图3-2所示)
图3-1回收机构设计示意图
4、竞赛过程说明
4.1现场抽签
现场抽签决定吸附物的形状及对应的报警颜色,吸附物为黑色物体,其截面形状为正方形、圆形、三角形、环形中的任意两种,抽到的两种再并排得到一个组合截面形状,所得的三种形状即为赛道吸附物形状,对应的报警颜色为红色或绿色或者红绿同步闪烁。
现场抽签决定管道的铺设方式和轨迹、吸附物的数量、吸附物沿管道布置的位置,并抽签确定各参赛队比赛的顺序号。
4.2准备时间
所有参赛队在规定时间内完成吸附物处理装置在水下机器人上的安装调试。
每队自带拆装工具和调试工具等,现场进行机电联调。
本环节不计分。
4.3吸附物的检测清理和回收
参赛队将水中机器人放置在出发区等待出发,裁判将遮挡物放在出发线上。
根据现场统一指令,启动机器人,裁判移开遮挡物同时计时开始。
在规定时间内(10分钟),水中机器人从出发区沿着水下管道游动进入浅水区,然后根据所抽到的赛道铺设轨迹开始行进,在这个过程中进行水下管道吸附物的检测并报警,当检测到吸附物时,按照吸附物的不同形状进行不同颜色灯光的闪烁,并将吸附物从管道上移除,要求移除吸附物时必须有明显的抓取动作。
4.3计分办法
如表2所示,每有效识别一个吸附物并正确报警计5分,所谓有效识别是指机器人检测到吸附物报警时,吸附物在水中机器人的垂直投影面内,正确报警是指报警颜色与吸附物的形状对应正确。
未有效识别或未正确报警均不得分。
每移除一个吸附物计20分。
在规定时间内,水中机器人从出发区到返回区所用时间,以10分钟为基准,每节省10秒钟加1分。
在规定时间内未完成比赛,则比赛结束。
每个参赛队有两轮运行机会,取两次成绩中的最好成绩。
表1决赛计分方法
序号
有效识别数
移除数量
比赛用时(s)
决赛得分
1
X
Y
M
Z=X
5+Y
20+(600-M)/10
以决赛总分对参加决赛的参赛队进行排名,若出现参赛队得分相同,则按前两项得分高低排序,高分者优先排序,如仍旧无法区分排序,则按移除数得分高低排序。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 水下 管道 智能 巡检 任务 命题 文档 150
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《残狼灰满》读后感15篇.docx
《残狼灰满》读后感15篇.docx
-
《高层建筑与抗震设计》复习题.docx
-
《乘法的初步认识》4.docx
-
《海底两万里》读后感读书笔记.docx
-
《我的伯父鲁迅先生》课堂实录及点评中.docx
-
《员工关系管理与劳动法实务》学习心得.docx
-
《hes just not that into you》其实他没那么喜欢你.docx
-
《杜甫诗三首》教案.docx
-
26个英文字母描红练习.docx
-
《金属钠的性质》教学设计.docx
-
0129科目三智能化考试计划单上午.docx
-
《城南旧事》读后感花儿落了精选多篇.docx
-
《乐记》的伦理思想探析论文.docx
-
《拥抱亲情感恩父母》设计主题班队会教案设计.docx
-
7基本算法语句提高.docx
-
10kV电力电缆振荡波局部放电检测试验方案.docx
-
《大学计算机应用基础》各章习题与上机实践参考答案或答题说明课件.docx
-
17秋学期《清史尔雅》在线作业满分答案.docx
-
《魔鬼代言人》经典台词.docx
-
《滕王阁序》 课堂设计.docx
-
2安全工作责任制度.docx
-
《学生手册》题库9 1.docx
-
5第五章 工程质量监理.docx
-
8项目部安全生产责任制.docx
-
16年级语文上册看拼音写词语田字格.docx
-
20语电脑词汇.docx
-
《匆匆》教学实录.docx
-
96S406建筑排水用硬聚氯乙烯PVCU管道安装图文.docx
-
423#民法总论.docx
-
《星星之火可以燎原》同步练习01.docx
-
2300MW火电机组烟气脱硫工程热控培训部分.docx
-
ab组填料填筑工艺试验总结.docx
-
初中有理数计算题500道及答案已整理.docx
-
村级美丽庭院卫生制度.docx
-
仓库年终工作总结3篇.docx
-
电工试用期工作总结15篇.docx
-
多功能时钟课程设计.docx
-
初中英语形容词比较级和最高级讲解与练习.docx
-
大摩金融词典.docx
-
辩护材料.docx
-
电力突发事件应急预案.docx
-
大学生资料员顶岗实习报告.docx
-
炒股票的经验范文标准版.docx
-
党政办经济情况报告2篇与党政工作个人年度总结三篇汇编.docx
-
仓储物流行业安全管理制度.docx
-
电力员工学习心得体会最新学习文档.docx
-
本安知识100问.docx
-
财务管理期末计算题题库 附答案.docx
-
发廊双11活动方案.docx
-
变压器选用与检修一体化工作页.docx
-
Unit 1 Your college years教案综英一.docx
