 dsp实现相异步电动机FOC控制实施方案.docx
dsp实现相异步电动机FOC控制实施方案.docx
- 文档编号:24630219
- 上传时间:2023-05-29
- 格式:DOCX
- 页数:16
- 大小:1.94MB
dsp实现相异步电动机FOC控制实施方案.docx
《dsp实现相异步电动机FOC控制实施方案.docx》由会员分享,可在线阅读,更多相关《dsp实现相异步电动机FOC控制实施方案.docx(16页珍藏版)》请在冰豆网上搜索。
dsp实现相异步电动机FOC控制实施方案
DS-MCKⅡ(dsp2812)实现三相异步电动机FOC控制方案
实验概述:
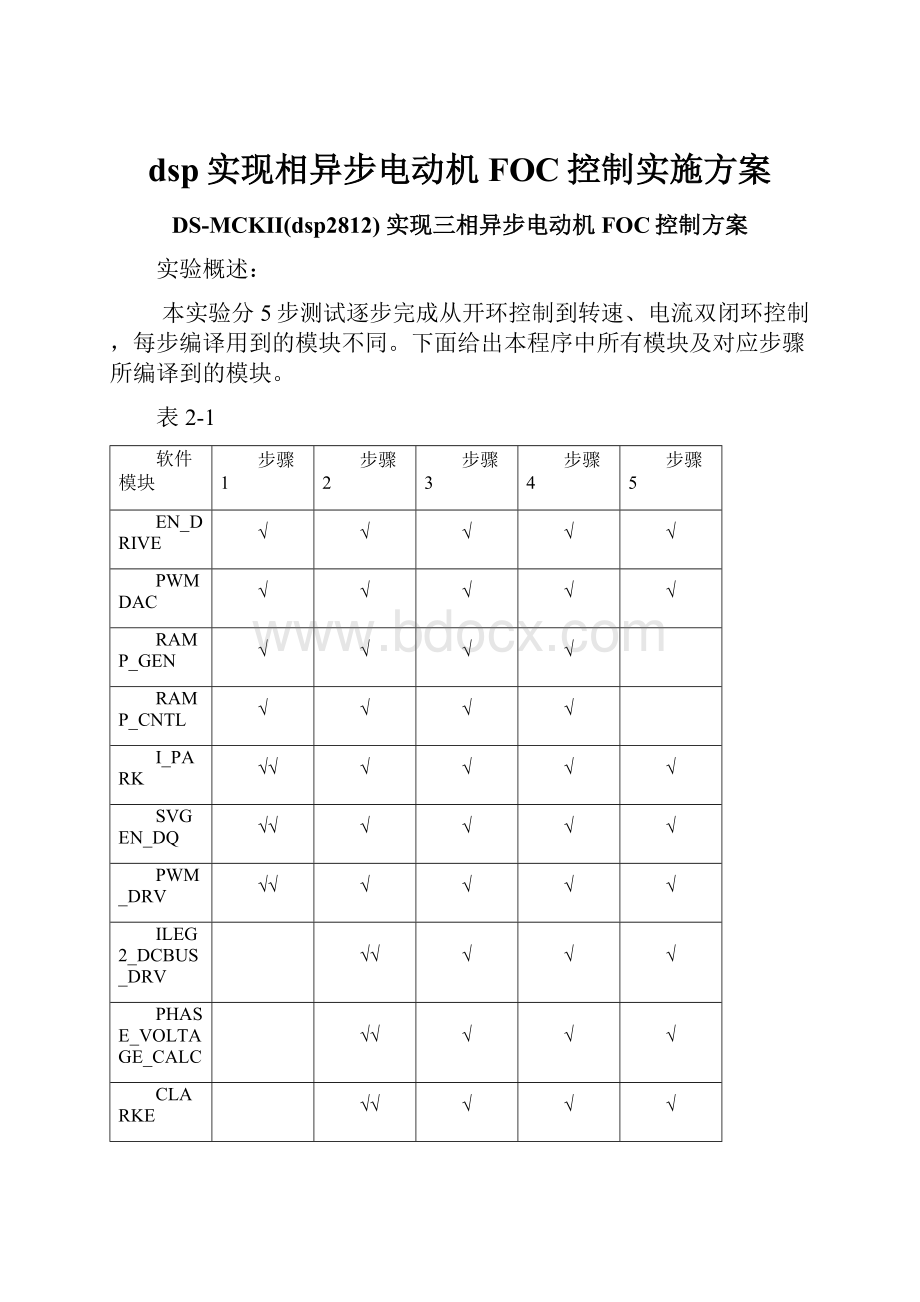
本实验分5步测试逐步完成从开环控制到转速、电流双闭环控制,每步编译用到的模块不同。
下面给出本程序中所有模块及对应步骤所编译到的模块。
表2-1
软件模块
步骤1
步骤2
步骤3
步骤4
步骤5
EN_DRIVE
√
√
√
√
√
PWMDAC
√
√
√
√
√
RAMP_GEN
√
√
√
√
RAMP_CNTL
√
√
√
√
I_PARK
√√
√
√
√
√
SVGEN_DQ
√√
√
√
√
√
PWM_DRV
√√
√
√
√
√
ILEG2_DCBUS_DRV
√√
√
√
√
PHASE_VOLTAGE_CALC
√√
√
√
√
CLARKE
√√
√
√
√
PARK
√√
√
√
√
CAP_EVENT_DRV
√√
√
√
√
SPEED_PR
√√
√
√
√
PID_REG3(ID)
√√
√
√
PID_REG3(IQ)
√√
√
√
CUR_MOD
√√
√
PID_REG3(SPEED)
√√
图标√表示本步骤用到此模块,图标√√表示本步骤要测试的模块
下面再给出每个模块的输入与输出量名称及其量值格式
表2-2
软件模块
输入量
输出量
名称
格式
名称
格式
EN_DRIVE
EnableFlag
Q0
GPIOA6
GPIOA11
GPIO 寄存器
PWMDAC_DRV
PWMDACINPOINTER0
PWMDACINPOINTER1
PWMDACINPOINTER2
PointerstoQ15variables
CMPR4
CMPR5
CMPR6
T3PER
EVB 寄存器
RAMP_GEN
Freq
Offset
Gain
IQ
Out
IQ
RAMP_CNTL
TargetValue
IQ
SetpointValue
IQ
I_PARK
Ds
Qs
Angel
IQ
Alpha
Beta
IQ
SVGEN_DQ
Ualpha
Ubeta
IQ
Ta
Tb
Tc
IQ
PWM_DRV
MfuncC1
MfuncC2
MfuncC3
MfuncPeriod
Q15
CMPR1
CMPR2
CMPR3
T1PER
EVregisters
ILEG2_DCBUS_DRV
ADCINx/y/z
ADCH/Wpins
ImeasA
ImeasB
ImeasC
VdcMeas
Q15
PHASE_VOLTAGE_CALC
MfuncC1
MfuncC2
MfuncC3
DcBusVolt
IQ
VphaseA
VphaseB
VphaseC
Valpha
Vbeta
IQ
CLARKE
As
Bs
IQ
Alpha
Beta
IQ
PARK
Alpha
Beta
Angle
IQ
Ds
Qs
IQ
CAP_EVENT_DRV
CAPn
EVH/Wpin
FIFOn
Ev寄存器
SPEED_FR
TimeStamp
EventPeriod
InputSelect
IQ
Out
IQ
PID_REG3
Ref
Fdb
IQ
Out
IQ
CUR_MOD
Ids
Iqs
Wr
IQ
Theta
IQ
(一)、FOC控制原理简介
FOC即磁场定向控制,它的基本思路是利用d-q旋转坐标变换,将定子电流分解成励磁电流Ds和转矩电流Qs。
在调速的过程中保持转子磁链ψ2不变,即让Ds=常数,此时,交流电动机的调速原理与直流电动机相同,控制定子电流的转矩分量Qs就象控制直流电动机的电枢电流,可以线性的调节交流电动机的输出转矩。
(二)、系统组成方案及功能模块划分
系统包含15个软件模块,下图给出了步骤5中系统的功能模块划分和模块间的相互关系。
图2-1
(三)、系统测试步骤和方法
步骤1、步骤1矢量计算和PWM生成测试实验
图2-1-1给出了实验程序功能框图,图2-1-2给出了实验程序的软件流程。
本步骤完成最小系统检查的任务,其中只用到表2-1步骤1中标记的功能模块。
以下给出步骤1中的控制参数及其调节范围
EnableFlag:
0、1;启停控制位
SpeedRef:
(0~0.99);速度给定值
VdTesting:
(0~0.9);D轴电流给定
VqTesting:
(0~0.9);Q轴电流给定
图2-1-1实验功能框图
图2-1-2实验软件流程
在实时模式下打开watchwindow窗口的Build1标签改变SpeedRef输入参量的值,从而改变斜坡信号和正弦波的频率。
在实时模式下修改watchwindow窗口中的VdTesting、VqTesting值,可以改变输出正弦波的幅值。
对应VdTesting等效直流电机中的励磁给定,VqTesting直流电机中的转矩给定(即电枢电压给定)。
利用图形显示功能观测输出量Ta、Tb、Tc和Ta-Tb的波形随输入参数改变的变化情况。
首先按操作规范完成“仿真器和实验箱”或者“仿真器和TechVCPU板”的连接,并接通它们的电源,在不连接功率单元的情况下先测试PWM输出是否正确。
操作方法是:
启动CCS软件,用“File——workspace”菜单命令打开“ACI3_3_281X\cIQmath\build”文件夹下的workspace文件“aci3_3_281x_ccs2x.wks”文件;将头文件“build.h”中的编译指令BUILDLEVEL设为“LEVEL1”;然后重新编译连接程序;加载并在实时模式下运行(RUN)编译完成的“aci3_3.out”程序;Watchwindow选中Build1标签,将图形显示窗口Channal1&2、Channal3&4、watchwindow改为连续刷新。
设置EnableFlag值为1。
启动程序。
改变SpeedRef、VdTesting、VqTesting值,观测图形显示窗口波形变化如下。
图2-1-5Ta和Tb波形图2-1-6Tc和Ta-Tb波形
步骤2、电流、直流母线电压、速度测试
此步骤在步骤1的基础上增加对电压、电流采样模块、clarke/park变换模块、速度测量计算模块的测试。
图2-2-1给出了实验程序功能框图,图2-2-2给出了实验程序的软件流程。
以下给出步骤2中的控制参数及其调节范围
EnableFlag:
0、1;启停控制位
SpeedRef:
(0~0.99);速度给定值
VdTesting:
(0~0.6);D轴电流给定
VqTesting:
(0~0.6);Q轴电流给定
图2-2-1“步骤二”功能框图
图2-2-2“步骤二”软件流程
在实时模式下打开watchwindow窗口的Build2标签改变SpeedRef输入参量的值,从而改变斜坡信号和正弦波的频率。
在主电路电源打开的情况下、电机空载转速在SpeedRef=0.99时可达到1450转/分。
在实时模式下修改watchwindow窗口中的VdTesting、VqTesting值,可以改变输出正弦波的幅值。
对应VdTesting等效直流电机中的励磁给定,此步中为定值0.25。
没有特殊情况可不改变此值。
VqTesting直流电机中的转矩给定,空载时给0,当电机带负载后可适当增加。
注意VqTesting、VdTesting越大电机电流越大。
可观察图形显示窗口中的Channal3&4中Ia和Ib电流的幅值,当其正弦波电流畸变为非正弦时说明VqTesting、VdTesting给定已经超出允许范围,应立即停止电机!
在实验过程中不要长时间给定很大值使电机工作。
首先,根据操作规范,对照附录二中的硬件连接图连接实验系统硬件,接通控制电源。
启动CCS软件,用“File——workspace”菜单命令打开“ACI3_3_281X\cIQmath\build”文件夹下的workspace文件“aci3_3_281x_ccs2x.wks”文件;将头文件“build.h”中的编译指令BUILDLEVEL设为“LEVEL2”;用“Project——Build”菜单命令编译连接程序;编译完成后,加载并在实时模式下运行(RUN)“aci3_3.out”程序;接通主电路电源;选中WatchwindowBuild2标签将图形显示窗口Channal1&2、Channal3&4、watchwindow改为连续刷新。
设置EnableFlag值为1。
启动程序。
改变SpeedRef、VdTesting、VqTesting值,观测图形显示窗口波形变化。
此时如果逆变电路正确,则电机缓慢启动,并逐渐达到给定转速;在实时模式下修改SpeedRef的值(0~0.99),相应电动机的转速发生变化。
为下一步实验测量Id的PID限幅值:
测量Id的PID限幅值:
SpeedRef=0.5使VqTesting=0,增加VdTesting直到图形显示中Ta的幅值为1,此时的VdTesting值即为下一步中Id PID的即幅值(±0.6)。
注意:
同步骤一一样VdTesting、VqTesting不要给太大值使电机长时间工作。
观测Ta、RMPGENoutput、Ia、Ib的波形。
图2-2-3Ta和RMPGENoutput 图2-2-4Ia和Ib
步骤3、两个电流PI调解器测试
在步骤2的基础上增加对DQ轴电流调节模块功能的测试和转速测量。
进行本试验前要首先完成以上两步实验,将电流反馈信号整定好。
图2-3-1给出了实验程序功能框图,图2-3-2给出了实验程序的软件流程。
以下给出步骤3中的控制参数及其调节范围
EnableFlag:
0、1;启停控制位
SpeedRef:
(0~0.99);速度给定值
IdRef:
(0~0.6);D轴电流给定
IqRef:
(0~0.6);Q轴电流给定
图2-3-2“步骤3”软件流程
此步除调整以上参数以外可以在主程序aci3_3.c中找到初始化Id的PID_REG3和Iq的PID_REG3,改变其比例、积分、微分参数。
使电机获得更加好的的启动过程。
首先,根据操作规范,对照附录二中的硬件连接图连接实验系统硬件,接通控制电源。
启动CCS软件,用“File——workspace”菜单命令打开“ACI3_3_281X\cIQmath\build”文件夹下的workspace文件“aci3_3_281x_ccs2x.wks”文件;将头文件“build.h”中的编译指令BUILDLEVEL设为“LEVEL3”;用“Project——Build”菜单命令编译连接程序;编译完成后,加载并在实时模式下运行(RUN)“aci3_3.out”程序;接通主电路电源;选中Watchwindow Build3标签,将图形显示窗口Channal1&2、Channal3&4、watchwindow改为连续刷新。
设置EnableFlag值为1,启动程序。
改变SpeedRef、IdRef、IqRef值,观测图形显示窗口波形变化。
此时如果参数给定正确,则电机缓慢启动,并逐渐达到给定转速;在实时模式下修改SpeedRef的值(0~0.99),相应电动机的转速发生变化。
观测Ta和RMPGENoutput、Ia和转速如图所示:
图2-4-3Ta和RMPGENoutput图2-4-4Ia和转速
注意:
同步骤一一样IdRef、IqRef不要给太大值使电机长时间工作。
图2-3-1“步骤3”功能框图
步骤4、电流模型测试
在步骤3的基础上增加对电流模型模块功能的测试。
电流模型模块从“PARK变换”模块和速度测量模块获取输入值,将计算得到的输出值送给“CUR_MOD模块”。
此实验前需要整定电流反馈信号。
图2-4-1给出了实验程序的软件流程,图2-4-2给出了实验程序功能框图。
以下给出步骤4中的控制参数及其调节范围
EnableFlag:
0、1;启停控制位
SpeedRef:
(0~0.99);速度给定值
IdRef:
(0~0.6);D轴电流给定
IqRef:
(0~0.6);Q轴电流给定
qep1.CalibratedAngle:
(0x0000~0xFFFF);光电编码器角度对位
图2-4-1“步骤4”软件流程
此步骤与上一步操作上是一样的,只是增加了对CUR_MOD模块的观测,实验中观测CUR_MOD模块的输出Theta的方向要与RMPGEN输出output相同。
若相反,将电机组中的光电编码器连接到电动机的另一端,从而改变光电编码器采得的旋转方向。
首先,根据操作规范,对照附录二中的硬件连接图连接实验系统硬件,接通控制电源。
启动CCS软件,用“File——workspace”菜单命令打开“ACI3_3_281X\cIQmath\build”文件夹下的workspace文件“aci3_3_281x_ccs2x.wks”文件;将头文件“build.h”中的编译指令BUILDLEVEL设为“LEVEL4”;用“Project——Build”菜单命令编译连接程序;编译完成后,加载并在实时模式下运行(RUN)“aci3_3.out”程序;接通主电路电源;Watchwindow选中Build4标签,将图形显示窗口Channel1&2、Channel3&4、watchwindow改为连续刷新。
设置EnableFlag值为1。
启动程序。
改变SpeedRef、IdRef、IqRef值,
光电编器角度对位:
使SpeedRef=0.5,转速稳定在一个值。
在watchwindow窗口Build4中空行处写入qep1.CalibratedAngle变量,并改变其值大小,观察Channel3&4中电流模型输出和RMPGEN output,使两个锯齿波的下降沿对齐(电流模型输出略滞后于RMPGENoutput),记住此时的qep1.CalibratedAngle值,停止程序,去掉实时模式,RESETCPU,在程序aci3_3.c文件中找到初始化qep1.CalibratedAngle=x;的语句,将值写入等号后,重新编译、载入程序,运行程序验证角度对位是否正确。
观测图形显示窗口波形变化如下图2-4-3、图2-4-4
图2-4-3Ta和Ia图2-4-4电流模型output和RMPGENoutput
图2-4-2“步骤4”功能框图
步骤5、有传感器速度闭环IFOC系统
此步骤用于测试速度调节器功能是否正确,完整电流、速度闭环控制能否可靠实现。
此步骤需要全部系统模块参与,它的正确实施要依靠前面5个步骤地正确进行。
实验前要首先进行电流反馈信号的整定。
速度调节模块从速度测量模块获取速度反馈值,速度参考值由用户给出,模块的输出作为转矩参考送给电流调节器模块。
励磁参考值由用户设定。
图2-5-1给出了实验程序的软件流程,图2-5-2给出了实验程序功能框图。
以下给出步骤5中的控制参数及其调节范围
EnableFlag:
0、1;启停控制位
SpeedRef:
(0~0.99);速度给定值
IdRef:
(0~0.3);D轴电流给定
图2-5-1“步骤5”软件流程
图2-5-2“步骤5”功能框图
首先,根据操作规范,对照附录二中的硬件连接图连接实验系统硬件,接通控制电源。
启动CCS软件,用“File——workspace”菜单命令打开“ACI3_3_281X\cIQmath\build”文件夹下的workspace文件“aci3_3_281x_ccs2x.wks”文件;将头文件“build.h”中的编译指令BUILDLEVEL设为“LEVEL5”;用“Project——Build”菜单命令编译连接程序;编译完成后,加载并在实时模式下运行(RUN)“aci3_3.out”程序;接通主电路电源;Watchwindow选中Build4标签,将图形显示窗口Channel1&2、Channel3&4、watchwindow改为连续刷新。
设置EnableFlag值为1。
启动程序。
改变SpeedRef、IdRef值,观测图形显示窗口波形变化如下图2-5-3、图2-5-4。
图2-5-3Ta和电流模型outp


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- dsp 实现 相异 电动机 FOC 控制 实施方案
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《当代世界政治与经济》.docx
《当代世界政治与经济》.docx
-
《背起爸爸上学》观后感5篇精品模板.docx
-
《个人能力提升计划》.docx
-
《教务管理课程管理系统》系统分析实验报告docx.docx
-
《弟子规》全文带拼音.docx
-
《海底两万里》名著导读及检测试题教学内容.docx
-
《氓》导学案答案.docx
-
《吞食天地2诸葛孔明传》完全攻略.docx
-
《再见了母校》诗歌朗诵稿6篇范文.docx
-
《铸造工艺说明书》word版.docx
-
12Unit9TheDamnedHumanRace.docx
-
27魏利金主讲郑州关于举办建筑结构设计疑难问题及结构施工图设计及审图常见问题专题1.docx
-
《电力建设工程质量监督检查典型大纲》风力发电部分.docx
-
《和孩子划清界限》读书笔记.docx
-
《莫泊桑小说两篇》doc.docx
-
《网络设备安装配置与调试》试题B卷.docx
-
《安全生产技术》第一章第一节.docx
-
《高级计算机网络》课程综述.docx
-
《检验核医学》教学大纲.docx
-
《大学英语》第6段段落与课文翻译.docx
-
《构造地质学》作图题例题.docx
-
《流体力学与热工基础》教学大纲重点难点.docx
-
《索证索要制度》.docx
-
《中医临床护理学》试题库及答案六.docx
-
2汽车装配工艺及调试技术10页word.docx
-
5 草船借箭教案.docx
-
《管理会计》试题库选择.docx
-
《麻雀》教案.docx
-
《砼渗水整改措施》.docx
-
《语言学纲要》 叶蜚声徐通锵版复习.docx
-
《产品质量法》培训.docx
-
《工程招投标与合同管理》期末考试复习题及参考答案.docx
-
湖南省建设工程施工阶段监理服务费计费规则.docx
-
互联网证券行业分析报告完整精品.docx
-
公共基础知识复习要点.docx
-
花旗银行的人力资源管理模式 花旗银行的人力资源管理实践.docx
-
公路工程施工监理合同范本条文说明word范文资料.docx
-
公务员考核总结5篇.docx
-
华为董事长的励志故事.docx
-
古诗词曲菊花鉴赏.docx
-
公务员考试必须记住的350条百科常识.docx
-
化合价教学设计.docx
-
共面度和平面度.docx
-
固定式压力容器安全管理制度.docx
-
环境保护局局长述廉报告多篇范文与环境保护局局长述廉报告汇编doc.docx
-
古诗清明教学设计一等奖.docx
-
关于感恩的记叙文.docx
-
关于高中毕业季散文.docx
-
关于明城墙的保护开发与研究.docx
-
关于信息建运一体化体系建设探究.docx
-
关于小学生成长档案上的评语.docx
