 移动网络CPRP部分2.docx
移动网络CPRP部分2.docx
- 文档编号:24589107
- 上传时间:2023-05-29
- 格式:DOCX
- 页数:27
- 大小:254KB
移动网络CPRP部分2.docx
《移动网络CPRP部分2.docx》由会员分享,可在线阅读,更多相关《移动网络CPRP部分2.docx(27页珍藏版)》请在冰豆网上搜索。
移动网络CPRP部分2
第二章APZ部分(CP/RP)
一、CP的发展历史及性能比较
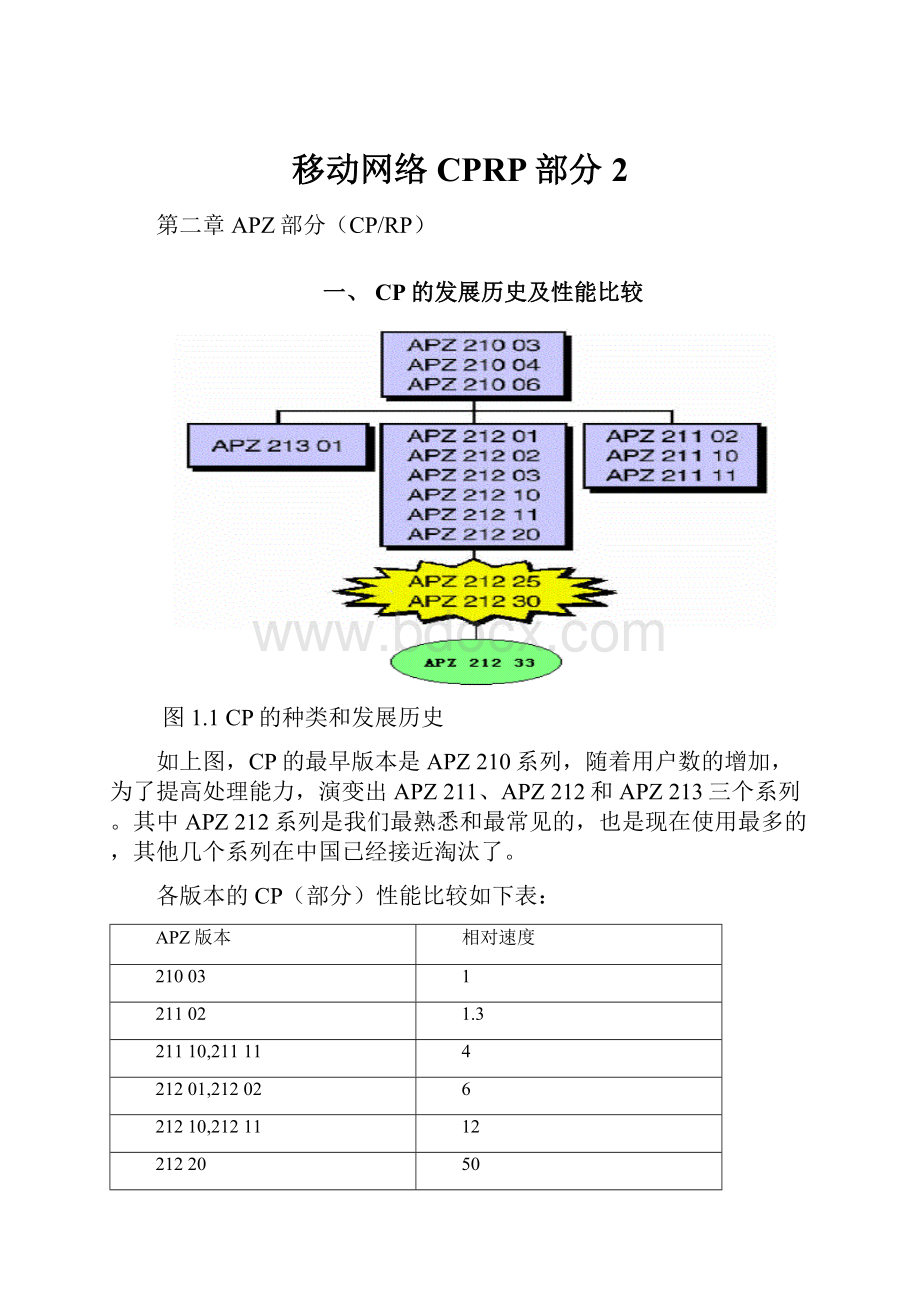
图1.1CP的种类和发展历史
如上图,CP的最早版本是APZ210系列,随着用户数的增加,为了提高处理能力,演变出APZ211、APZ212和APZ213三个系列。
其中APZ212系列是我们最熟悉和最常见的,也是现在使用最多的,其他几个系列在中国已经接近淘汰了。
各版本的CP(部分)性能比较如下表:
APZ版本
相对速度
21003
1
21102
1.3
21110,21111
4
21201,21202
6
21210,21211
12
21220
50
21225
20
21230
200
21233
300
广东省目前最常用的CP是APZ21230和APZ21233这两个类型,光从处理能力来看,30的CP能够处理的用户数是30-40万左右,而33的处理能力大概是30的1.5~1.8倍左右。
下面介绍CP的功能和结构的时候,主要就以这两种为例。
二、CP的硬件结构
1、APZ21230/33的实物面板图
APZ21230/33A面CP实物图
APZ21230/33B面CP实物图
APZ21230/33B面CP的面板示意图
2、CPU面板的各PCB介绍
•POU-C:
电源模块
•SPU(SignalProcessorUnit):
和RP通信,把来自RP的任务按优先级放到不同的缓冲区,并为IPU准备任务
•IPU:
InstructionProcessorUnit(指令处理单元)
•STUD:
内存板,有DRAM和SRAM,由IPU操作
•MAU:
自动维护单元,只有B边有
•POWC:
包括如下功能
a、ErrorregistrationanderrorsignalingtoMAU
b、CPUworkstatelogic
c、Clockgenerationandclockswitchingfuction
d、LogicforsendingCPTsignalsbetweenSPUandMAU
e、InterfaceforreadingPCBboardsID(self-identifyinghardware)
f、InterfacelogicforMIAindication
g、Supervisionoffansandpower
3、APZ21230/33的硬件功能块
APZ212的功能块示意图
APZ21230/33主要包括如下几个硬件功能块:
(1)、CPU(TheCentralProcessorUnit),包括IPU(InstructionProcessorUnit)和SPU(SignallingProcessorUnit)。
SPU又由两部分组成:
主SPU和从SPU,主要负责作业的调度和管理;而IPU则负责作业的执行。
PS(PROGRAMSTORE,程序存储)和RS(REFERENCESTORE,参考存储)的物理实现是通过IPU来完成的。
CPU的主要工作流程如下:
A、SPUreceivesasignal(job)fromRPHorIPU.
B、WhenthetimecomesIPUwillfetchthejobfromajobbufferin
SPU.
C、IPUfetchesstartaddresseslocatedinRSfortheprogramsequence
tobeexecutedinPSandcorrespondingdatalocatedinDS.
D、IPUfetchesandexecutesprogramsequenceinstructions.Thedata
arefetchedfromDS.
E、TheresultoftheprogramexecutionisfetchedbySPU.Theresult
mightbeanotherjobtobeexecuted.
(2)、TheStorageUnitData(STUD)containstheDataStore(DS).
(3)、TheDisplayandPowerController(DPC),主要目的是监视电源。
(4)、TheRegionalProcessorHandler(RPH),连接RPBUS到CP上,当需要使用不同数量的RP时可以采用不同的硬件配置。
可以分别连接串行RP和并行RP,也可以同时连接串行RP和并行RP。
(5)、TheMaintenanceUnit(MAU),主要目的是监视CP的状态,并作为CP跟CPT系统的接口存在,同时监视用于冷却CP的风扇的状态。
(6)、TheMaintenanceUnitInterface(MAI)andPowerControlUnit
(POWC)。
上面的硬件模块中,CPU、STUD、DPC、MAI和POWC都属于CPS系统,RPH属于RPS子系统,MAU属于MAS子系统。
4、APZ21230/33的总线
APZ21230/33的总线示意图
(1)、RPHB(RPHANDLERBUS)
SPU通过RPHB跟RPH相连,从而控制RP,RPH是RP跟CP之间的接口。
(2)、UMB(UpdatingandMatchingBus)
更新比较总线,Ex侧传送数据到SB侧以比较两侧数据或更新SB侧。
这种总线位于机框的背面,连接两侧CP的IPU和SPU。
(3)、AMB(AutomaticMaintenanceBus)
自动维护总线,CP通过AMB向MAU报告故障,MAU通过AMB向CP发送命令。
这是两侧CP与MAU之间的连线。
(4)、CTB(CPUTESTBUS)
CPU测试总线,在CP不可用时,MAU完成CPT功能。
这是两侧CP与MAU之间的连线。
(5)、PTB(ProcessorTestBus)
处理机测试总线,连接MAU和IOG。
CPT系统和MAU、IO系统的通信通过PTB来完成。
三、CPS系统
1、CPS系统的组成
CPS包括两个CP处理器(包含CPU、DS、POWC、MAI和STUD等)和相应的软件,这些软件包括管理、程序的执行和引导,内存的分配以及测试等等。
(应用软件也是存储在CP中,并由CP来执行,但从结构的角度来讲,它们是属于APT部分的)
在正常的操作时,APZ软件和APT软件并没有很多交互,但是当存在APZ错误时,例如,一个闭塞的RP或者操作的改变(改SIZE等),就会发生一些APT和APZ之间的交互。
不同的APT功能块彼此通信时通过APZ功能块来处理的,此时APZ功能块只是充当一个管道的功能,并不对传送的内容有任何改动。
CPS跟APZ的其他子系统是紧密相关的,例如在处理器维护时跟MAS子系统,在LOAD软件和DUMP软件时跟IO子系统等。
2、CPS系统的功能
(1)作业执行和数据处理:
根据不同作业优先级来处理,由软件、微程序控制,每条指令对应一段微程序。
(2)FunctionChange:
增加、删除、替换CP内的功能块。
(3)备份处理:
可以备份到CP内存中或者HD。
(4)Loading:
CPLoading、Reloading(自动和人工),内存的重新分配(PS、DS、RS)。
(5)SizeAlteration:
增加或减少数据文件的记录数。
(6)ProgramCorrection:
利用汇编语言,插入或删除程序补丁。
(7)TestSystem:
在不影响话务的情况下,跟踪信号和变量,也用于出厂前的测试。
(8)处理机负荷统计:
LOAS,打印CP负荷命令:
PLLDP。
(9)维护统计:
收集系统状态信息和各种事件信息如Restart次数、Bit-Fault数量、内存大小等。
(10)系统瘫痪时间、临时性、永久性故障等的记录。
指令:
DIRCP
3、CP的状态
(1)、CP的正常状态
当CP处于正常状态时,CP-A:
EXCP-B:
SB/WO
处于正常状态的CP,EX、SB/WO两侧CP执行相同的工作(程序和数据均一致),EX侧控制RP、处理话务,SB/WO侧对两边的CP数据做比较工作,AMU处于“Passive”模式。
(2)、CP的所有状态及其代表的含义
EXEXECUTING:
本侧CP控制话务,对RP有控制权
SB/WOSTANDBYWORKING:
本侧CP与EX侧执行相同的程序和数据、与EX侧热备用工作
接受RP信号同时也向RP发送信号,但RP不读入数据仅作为校验用(检查RPB)
可以无间断的接替执行侧CP的工作
SB/SESTANDBYSEPERATE:
本侧CP执行程序但不与EX侧比较和同步,用于FC。
e.g:
升位、CP初始启动、CPT接入等,控制信号只送分离的RP和分离的终端、被更新后成为SB/WO或直接成为EX侧
命令:
DPSES、FCSEI、PTSES
SB/UPSTANDBYUPDATING:
本侧CP被执行侧更新,目的是保持两侧CP的程序数据一致
通过UMB从执行侧CP把执行数据和程序送入SB侧
中间状态,successful--->SB/WO,unsucessful--->SB/HA
SB/HASTANDBYHALT:
本侧CP停止工作,不执行程序
原因:
永久的硬件Fault、过于频繁的临时故障(芯片不稳定,干扰)
命令:
DPHAS
(3)、CP状态间的转换
CP状态转换图
4、SYSTEMRESTART
系统重启动是指强迫系统从一个已定义好的某一点重新开始执行,系统清除CL型变量,软硬件功能块置初始状态。
重启动并不能消除故障,只是系统试图从故障中恢复运行的方法。
(1)、哪些情况会引起RESTART?
盲选失败
RPB的硬件故障(CP失去了与许多RP的联系)
RPH的硬件故障
软件故障
人机命令:
SYREI:
RANK=,EXPL=;
(2)、系统RESTART的三个级别及其完成的工作:
SMALL:
清除未建立(处于RE)呼叫、不影响已建立呼叫
CL对已建立的呼叫检查Link(指针、BN、GS路径),若发现数据有错,拆除该呼叫
清除作业缓冲区、JobTable
恢复CL型变量的初始值
ResetRPH
LARGE:
除半永久性连接不受影响,拆除所有呼叫,其他同SMALL
RELOAD:
系统对软件故障的最后措施,中断话务10~25分钟,清除所有呼叫,从HD的备份文件中装入程序和数据(重装整个PS、DS和RE型变量),LargeRestart后恢复话务。
Start:
初始启动,在SB/SE侧进行,APZ功能块自动启动,APT功能块由SYATI启动,不扫描EM。
5、系统对软件故障的处理
(1)软件故障的分类
软件故障主要有:
逻辑错误
寻址越界:
信号发给不存在的功能块、SN不存在。
作业缓冲区满
死循环
(2)PHC电路工作原理及软件故障处理
PHC电路实际上是一个加法计数器,CP每隔10ms送一个RESET信号脉冲给PHC,计数器清零;因此若系统正常工作,计数器永远不可能超过60ms(212:
70ms)的限值。
若系统发生故障,就无法送出周期性的RESET信号脉冲给PHC。
计数器超过限值,PHC送PHE信号到AMU/MAU,AMU/MAU命令CP启RESTART或RELOAD
PHCI按键:
按下PHCI按键,PHC的计数器停止计数(为0),PHC就不会送PHE信号给AMU/MAU,AMU/MAU亦不会命令CP启RESTART或RELOAD。
当系统检测到软件故障时,送PROGERROR信号给JOB,JOB进行一些必要的检查后把故障信息通过信号SYRRQ1送给SR,SR保存故障信息到变量OSDATA(H’2),然后执行一段死循环的程序。
此时系统无法定期送出RESET信号脉冲给PHC,PHC电路不断计数,当超过60ms(212:
70ms)的限值时,PHC就认为程序执行出错。
PHC送PHE信号给AMU/MAU,AMU/MAU根据记录要求CP启动某一级别的RESTART。
10分钟内连续发生故障RESTART就会升级。
当系统不断发生故障,PHC电路的计数器每隔一定时间就超过限值,就会周期性地发送PHE信号给AMU/MAU,AMU/MAU就会周期性地命令CP启动RESTART或RELOAD,从而产生循环RESTART或RELOAD。
按下PHCI,循环RESTART或RELOAD停止。
注:
PHC所在功能块:
MPS(APZ211)、MAI(APZ212)
PHCI按键所在板:
MPS(APZ211)、POWC(APZ212)
(3)SYSTEMRESTART过程:
保存CPU(APZ212:
SPU、IPU)寄存器的内容(10~20分钟恢复话务)
EX:
SDP-->RESTART-->EX----->ALARM:
“SYSTEMRESTART”
SB/WO:
SDP-->SB/HA---->SB/UP-->SB/WO
(4)维护人员的处理:
OPI“SYSTEMRESTART”
调整日期:
CACLS:
DATE=,TIME=,DAY=;
并行CP:
DPPAI;
消除告警(AlarmList):
SYRAE;
打印“RESTARTDATA”:
SYRIP;EX侧数据(APZ212)
6、常用的CP指令
SAOSP;可得到CP版本和PS,DS,RS容量
SASTP;可得到内存的容量大小以及分配的情况
DPWSP;普通情况下显示CP状态
PTWSP;显示CP状态的CPT命令
DPSWI;在CP正常工作时,主/备切换
PTSWI;与DPSWI功能相同,为CPT命令
DPPAI;对不正常工作的CP进行并边,使其变成SB/WO(中间会经过SB/UP)
DPSES;使CP由SB/WO|SB/HA|SB/WO_FM变为SB/SE
FCSEI;分离CP的备用侧,是FUNCTIONCHAGNE指令
DPHAS;使CP由SB/WO|SB/SE变为SB/HA(不会在线作)
PTCPL;由分离SP通过分离LINKLOAD分离CP
FCCPL;在分离CP、分离LINK的前提下LOAD分离侧CP
注:
PTCPL和FCCPL作的Load,其APT部分为Passive,在PTSWI/FCSWI前必须用SYATI命令激活其APT部分的块功能
四、MAS子系统
1、MAS子系统的组成
MAS系统由MAU的软件单元和硬件单元组成。
2、MAS子系统的功能
MAS负责监视系统、检测系统故障,对故障进行诊断、测试、定位,产生告警,隔离故障,力求使系统故障影响减少到最少程度,以维持系统正常地不间断地运行。
此外还对故障修复提供指导。
MAS的基本功能是监视和控制两边CP,通过接收CP硬件和软件的错误信号,并诊断分析错误信号以定位故障,进行故障的修复,同时产生告警。
MAS同时提供CPT系统,以使操作者在普通IO无法操作时(如初始化系统或系统因故障而停止运转)可以跟系统联系上。
CPT系统同时可以处理中央软件的软件错误。
一般情况下,指令的输入是从IO系统通过一条RPBUS发送到CP来完成的。
相对应的,CPT也使用了连接MAU和IO系统的一条BUS线。
IO系统上的AT终端可以通过这条BUS跟CP通信。
操作模式是在CPT的通信模式下,这种模式下只有一些符合人机语言的指令和打印输出能够完成。
其中一些CPT指令是用来测试、追踪和起CP的。
进入CPT的方法有两种:
a、用LOCALCABLE通过LOCALPORT连接到系统,然后执行PTCOI连接到CPT系统。
b、在普通终端用MCLOC:
USR=SYSTEM,PSW=INIT;进入LOCALMODE,然后执行PTCOI进入CPT系统。
退出CPT时执行PTCOE即可。
常用的CPT指令有
PTAMR;RESETMAU
PTITI;测试CP
PTCPL在分离CP、分离LINK的情况下LOAD分离的CP边。
3、CPFAULT的常见处理
(1)、CPFAULT分类
永久性错误(Permanent)电路或器件引起,Updating不能恢复
临时性错误(Temparary)由静电干扰引起,Updating可恢复
(2)、CP故障检测方法:
a、MATCHING电路
b、专用电路监视(电压、校验位、地址、时钟)
c、对专用电路测试(例行、固定时间间隔)
(3)、对CPFault的处理
REPCI;检测CP故障,按可能性列出框和板。
REMCI:
MAG=,PCB=;人工干预,是动CP硬件的前提,参数由上面REPCI的结果得到。
执行完后可得出处理流程,然后进行关电,换板等处理。
RECCI;检查处理结果,如果不成功则重复执行REMCI,对REPCI列出的第二种可能的坏件进行操作。
REPCE;中断修复过程。
五、RPS子系统
1、RPS子系统的组成
RPS子系统包括RPH(RegionalProcessorHandler)、RPS(Regional
ProcessorBus)和为了满足用户接入控制的需求而产生的各种各样的RP。
RPH接口是从CP开始的第一个RPS单元,其主要任务是提供RPBUS的连接口,以临时存储来往CP的信号信息,并把信号送到RPBUS上。
RPB是连接RP和两边CP的总线,有串行RPB和并行RPB两种,分别称为RPB-S和RPB-P。
RPB的一边是连接RP,另一边则接在RPH上。
每条RPB可以输送的信令信息都是遵从通信协议的。
RP是设计来执行一些常用功能的,主要用于直接控制应用系统的硬件单元。
EM(EXTENSIONMODULE)是被定义为设备的一群用户或接入中继。
一个EM是可以被系统定义和删除的最小的控制单元。
2、CP、RP、EM之间的关系
CP、RP、EM三者间的关系,可以简单的说是CP控制RP,RP控制EM。
CP、RP和EM的连接示意图
CP、RP和EM之间的比较如下:
名
称
CP
RP
EM
功
能
复杂工作,
系统核心
常规工作,
协助CP
最小单元,软件
每次处理一个
级
别
最高
受控于EXCP,
控制对应的EM
受控与对应RP
工作
方式
热备用,
并行工作
RPTWIN,
负荷分担
逐一控制(除GS)
软
件
中央软件,
开局装入
局域软件,解闭时
由CP装入
为接口,有RP
控制
产生
影响
整个系统
本RPs内的设备
EM内的设备
容
量
32*RPs/RPB
16*EMs/RP*3
EM容纳的设备
和其类型有关
与设备
关系
控制不同的设备
控制不同的设备
(须装入其软件)
同种设备
3、CM的概念
RP以RSU(RegionalSoftwareUnits)的形式LOAD入应用码,同类设备集成群以EM为单位被相同的RSU控制。
那部分的RSU码控制了EM和相对应的数据,这些对应的数据就是CM。
到达RP的信号,通过RP地址和CM号来选择对应的RSU,RP中存储的对应程序的数据对每个CM都是唯一的,但是程序代码可以被一些CM共享(即一个CM只能对应一个SUID,但是一个SUID可以同时对应多个CM)。
对大多数RP类型来说,同一RP不同CM之间的交互是不可能的,而不同RP之间的信号交互则是决不允许的。
通常每个CM对应一个EM,每个EM对应一个硬件单元。
RP内有CM0-CM31共32个CM,每个CM分配一项工作:
CM0-CM15分配给EM0-EM15(不严格对应)
CM16REXR用于故障恢复
CM30TERTRTestSystem/Trace用
CM31RPFDR用于检测RP运行情况(RPD为RPFDR和RDEXR两个,这些在RPLoad时要设)
4、RPS的功能
RPS实现两个功能:
支撑功能和维护功能
支撑功能包括LOADING、FUNCTIONCHANGE、TESTANDCORRECTION。
维护功能包括管理、检错、恢复、告警、修理、诊断、启动/重启动和重启备份等。
5、RP的类型
RP的类型主要有如下几种:
(1)、RPS-1包括RP1和RWMRP等。
(2)、RPS-2包括RP2、RPD、RPG等。
(3)、RPS-M包括STC、STR、RPBC、EMRP和EMRPD等。
(4)、串行RP,包括RP4/H、RP4/F、RPP、RPG2和RPV2等。
其中,前三种是并行的RP,第四种是串行RP。
在这些RP中,RPD、RPG、RPG2这几种RP是要先解闭EM再解闭RP的,其余的RP都是先解闭RP后才能解闭EM。
另外,在现有的RP中,有些RP是不用接RPB的,如RPP、RPG等,它们通过背板连线接到接口RP去,通过这种手段来接受CP的控制,此时接口RP主要起控制、维护的作用。
不管是那种RP,每个CP所能处理的RP数都是由其RPB的数目决定的,每条RPB可以带32个RP。
21225的CP可以带16条RPB,所以可以处理512个RP,21220/30/33都可以带32条RPB,都可以处理1024个RP。
6、串行RPB和并行RPB的区别
RP分为并行RP和串行RP两种。
并行RP对中每个RP都有一对RPB跟两边CP相连,同时跟两边CP进行通信,但只接收一侧CP的指令。
并行RP的寻址是根据其RPB的编号和地址插头的编号来确认的。
并行RP跟CP相连的总线就是RPB-P。
并行RP跟并行RPB与CP的连接示意图
串行RP对中每个RP只有一根RPB跟CP相连,只跟一边CP进行通信,接收一边CP的指令。
RP对间的通信通过背板的连线完成。
串行RP的寻址是通过每个框的地址板和RP板本身在机框中的时隙号来决定的。
串行RP跟CP相连的总线就是RPB-S。
串行RP跟串行RPB与CP的连接示意图
从上面两个连线图,我们也可以看出,与采用并行RPB的CP相比,采用串行RPB的CP多了CP间相互交叉连接的总线,这是因为串行RP只与一边CP通信,而另一边的CP要获取RP的信号就只有通过这些总线了。
由于串行RP只与一边CP通信,所以串行RP比并行RP的传送性能高出一到两倍。
由于RPB连线的不同,所以RPH板也有所区别,串行RPBUS板为RPIRS-S板,并行RPBUS板为RPIRS-P板,串行RPBUS板上可连接4条RPBUS,并行RPBUS可连2条RPBUS,由下往上数,两个口为一条RPBUS,一进一出。
串行RPBUS板上还有两个CROSSCONNECT口,并行RPBUS板上没有。
这里再特别提出并行RP的寻址问题。
每根RPB可以带32个RP,RPB的编号是从0开始的,RP的编号也是从0开始的,也就是说第一根RPB带的RP,其编号是从0~31,


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 移动 网络 CPRP 部分
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《当代世界政治与经济》.docx
《当代世界政治与经济》.docx
-
《背起爸爸上学》观后感5篇精品模板.docx
-
《个人能力提升计划》.docx
-
《教务管理课程管理系统》系统分析实验报告docx.docx
-
《弟子规》全文带拼音.docx
-
《海底两万里》名著导读及检测试题教学内容.docx
-
《氓》导学案答案.docx
-
《吞食天地2诸葛孔明传》完全攻略.docx
-
《再见了母校》诗歌朗诵稿6篇范文.docx
-
《铸造工艺说明书》word版.docx
-
12Unit9TheDamnedHumanRace.docx
-
27魏利金主讲郑州关于举办建筑结构设计疑难问题及结构施工图设计及审图常见问题专题1.docx
-
《电力建设工程质量监督检查典型大纲》风力发电部分.docx
-
《和孩子划清界限》读书笔记.docx
-
《莫泊桑小说两篇》doc.docx
-
《网络设备安装配置与调试》试题B卷.docx
-
《安全生产技术》第一章第一节.docx
-
《高级计算机网络》课程综述.docx
-
《检验核医学》教学大纲.docx
-
《大学英语》第6段段落与课文翻译.docx
-
《构造地质学》作图题例题.docx
-
《流体力学与热工基础》教学大纲重点难点.docx
-
《索证索要制度》.docx
-
《中医临床护理学》试题库及答案六.docx
-
2汽车装配工艺及调试技术10页word.docx
-
5 草船借箭教案.docx
-
《管理会计》试题库选择.docx
-
《麻雀》教案.docx
-
《砼渗水整改措施》.docx
-
《语言学纲要》 叶蜚声徐通锵版复习.docx
-
《产品质量法》培训.docx
-
《工程招投标与合同管理》期末考试复习题及参考答案.docx
-
贪吃蛇与黑白棋程序设计文档格式.docx
-
寿险营销业务人员管理规定(试行)Word格式.doc
-
医院各科室规章制度 2Word文件下载.docx
-
像经济学家一样思考习题及答案文档格式.docx
-
土力学试题精简版横版Word文件下载.docx
-
精撰XX生鲜品牌连锁超市项目推广运营商业计划书Word文档格式.docx
-
现代化蛋种鸡养殖场投资建设项目商业计划书Word文件下载.docx
-
线上运营要点Word下载.docx
-
中学学年度第二学期德育工作计划Word文件下载.docx
-
教师对学生评语大全88句Word文档下载推荐.docx
-
小学三年级下册思想品德教案文档格式.docx
-
高考生物二轮复习 专练八 酶和ATPWord文档格式.docx
-
小二班工作总结Word格式文档下载.docx
-
业务科工作制度Word文件下载.docx
-
全国自学考试《成本会计》试题和答案Word格式.docx
-
FTU与环网柜电源备自投技术总结Word格式.docx
-
届山东省泰安市泰山中学高三毕业班下学期第五次高考模拟考试语文试题及答案解析Word文件下载.docx
-
试题精选英语必修5人教版同步练习及答案53页Word文件下载.docx
-
推拿学考试题4文档格式.docx
