 制动控制原理PPT.docx
制动控制原理PPT.docx
- 文档编号:24329439
- 上传时间:2023-05-26
- 格式:DOCX
- 页数:19
- 大小:477.75KB
制动控制原理PPT.docx
《制动控制原理PPT.docx》由会员分享,可在线阅读,更多相关《制动控制原理PPT.docx(19页珍藏版)》请在冰豆网上搜索。
制动控制原理PPT
第八章非线性控制系统分析
8-1非线性控制系统概述
1、研究非线性控制系统的意义
●实际控制系统都具有非线性特性
线性化---线性控制系统
线性化严重、本质非线性---非线性控制系统
有时在控制系统中加入适当的非线性因素可有利于控制质量的提高.
●非线性控制系统定义
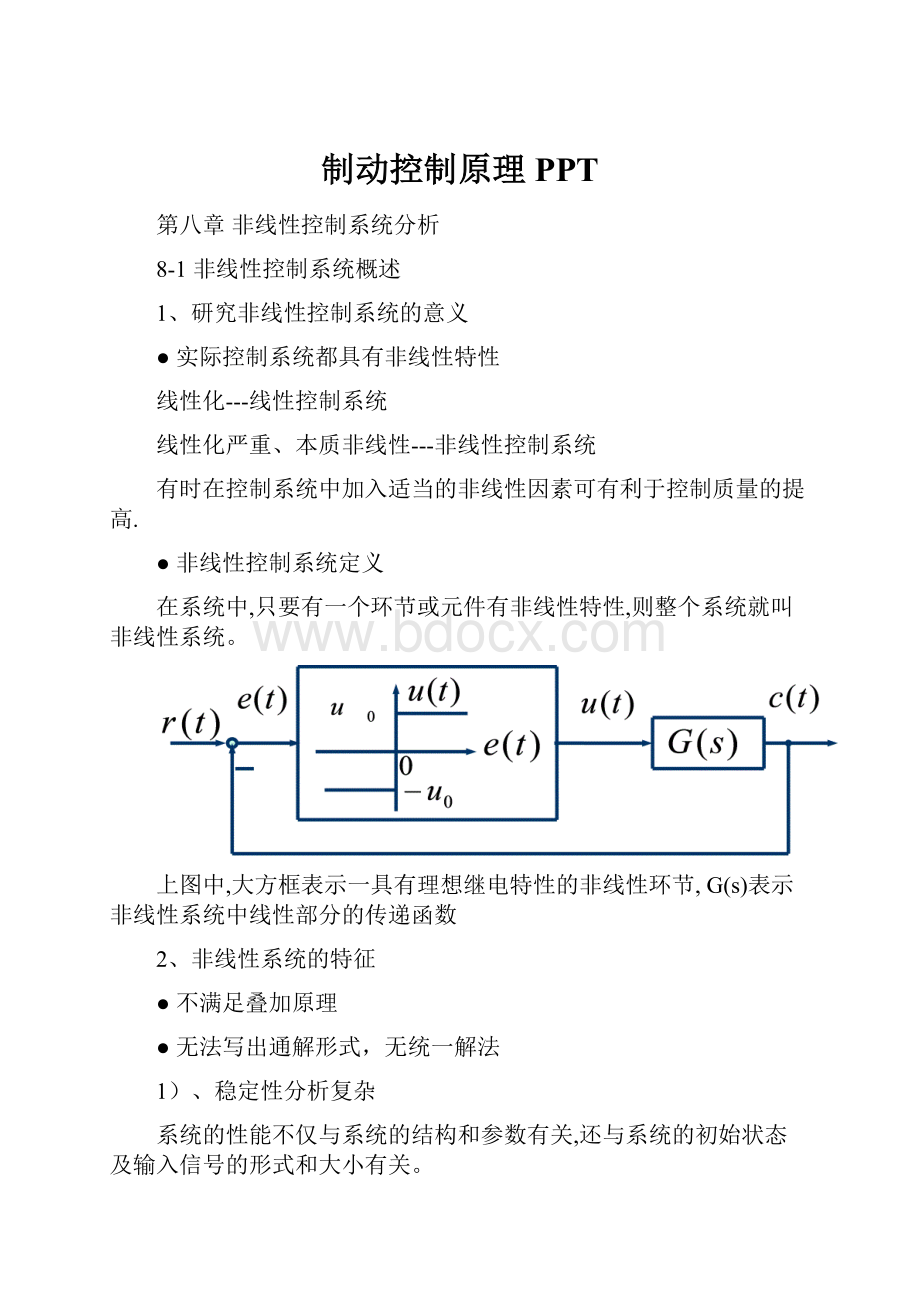
在系统中,只要有一个环节或元件有非线性特性,则整个系统就叫非线性系统。
上图中,大方框表示一具有理想继电特性的非线性环节,G(s)表示非线性系统中线性部分的传递函数
2、非线性系统的特征
●不满足叠加原理
●无法写出通解形式,无统一解法
1)、稳定性分析复杂
系统的性能不仅与系统的结构和参数有关,还与系统的初始状态及输入信号的形式和大小有关。
2)、可能存在自激振荡现象
在没有外界周期变化信号的作用时,系统内产生的具有固定振幅和频率的稳定周期运动称为自激振荡,简称自振。
3)、频率响应发生畸变
3、经典理论中
非线性系统的分析与设计方法
⑴相平面法
⑵描述函数法
8-2常见非线性特性
及其对系统运动的影响
y=f(x)
等效增益:
k=y/x=f(x)/x
非线性环节的等效增益为变增益
常见非线性特性的等效增益曲线
8-3描述函数法
一.描述函数法的基本概念与定义
1、描述函数法的基本概念
描述函数法分析法是线性系统频率响应法的推广。
它运用等效近似的方法,将非线性元件的特性线性化,用频率响应法中的某些结论及方法来研究非线性系统的稳定性问题。
x
设非线性系统的典型结构图为
y
c
1由(或等效)一个非线性元件和一个线性部分组成。
设x=Asinωt
则y(t)为非正弦的周期函数,展开成傅里叶级数:
式中傅氏系数:
②当非线性特性奇对称,则式中A0=0,即y(t)中恒定分量为零。
例:
理想继电特性
A0=0且当n>1时,Yn均很小。
③又线性部分一般都有惯性,即具有低通滤波特性。
因此到x端近似地只有一次谐波y1起作用。
即闭环通道内近似地只有一次谐波分量流通,因此只用输入x1(t)和输出y1(t)就足以描述非线性元件的基本特性。
小结:
非线性系统描述函数法分析的应用条件(P306)
2、非线性元件描述函数N定义:
非线性元件输出一次谐波分量(基波)与输入正弦信号的复数比值。
即
一般情况下,若非线性元件不包含储能机构,则y1(t)与频率ω无关,描述函数只是输入幅值A的函数:
N=f(A)
这样可写出前图示系统的特征方程:
N(A)G(s)+1=0
其中N可看作增益系数。
与线性系统特征方程相比,其差别仅仅是:
增益N是复数,并且是正弦输入幅值A的函数,因此可以用频率响应法中的某些结论及方法来分析和校正非线性系统的稳定性、确定自激振荡的参数等。
对任何阶次的系统,描述函数法都能提供稳定性的信息,因此应用广泛。
但由于描述函数只是正弦输入作用下非线性元件性能描述,所以对于时间响应特性,这个方法不能给出确切的信息。
二、典型非线性系统描述函数
1、理想继电特性
输入和输出特性如下:
∵非线性特性对称,y(t)是奇函数
∴A0=0,A1=0
N随M/A关系见图,其为变增益环节。
2、
y(t)
滞环继电特性
y(t)=y1sin(ωt+ψ1)
正弦输入作用下与理想继电特性图相比,输出波形幅值不变,仅输出波形滞后。
∵Asin(ωt1)=h
∴滞后相位ωt1=sin-1(h/A)=ψ1
因此N=4M/πA∠sin-1(h/A)
3、常见典型非线性特性的描述函数表:
P310
共同特点:
非线性单值,N为实数
多值,N为复数
三、系统简化
设r=0,将非线性系统等效为一个非线性环节与一个线性部分串联。
1、非线性部分等效
(1)并联等效
若某非线性y=y1±y2
其中y1=f1(x)…N1
y2=f2(x)…N2
则 y…N=N1±N2
利用这一结论,可将一个比较复杂的非线性特性,分解为若干个比较简单的非线性环节并联,然后求N。
例
(2)串联等效
若两个非线性环节串联,可将两个环节的特性归化为一个特性,即以第一个非线性环节的输入和第二个非线性环节的输出分别做为归化后非线性特性的输入和输出,从而做出等效非线性特性。
例
注:
1)、一般情况下,N(x)≠N1(x)N2(x);
2)、串联非线性环节的次序不可交换;
3)、多个非线性环节串联,先归化两个,等效后的环节再与第三个非线性环节归化。
(3)线性部分等效变换
保持(等效)非线性环节的输入和输出关系不变,按线性系统等效变换原则进行结构变换,使之成为一个等效线性环节。
例
四、非线性系统稳定性分析的描述函数法
若非线性系统经过适当的变换简化后,具有图示一个非线性环节和一个线性部分串联的典型闭环结构形式。
且非线性环节特性对称,及线性部分具有良好的低通滤波特性。
则非线性环节可以用描述函数N来表示。
非线性系统满足N应用条件等效线性系统
非线性环节谐波线性化N(A)复变增益
的比例环节
频率响应法分析稳定性
比较线性系统,若开环传递函数为G`(s),则闭环为G`(s)=-1
稳定性为:
判别G`(jω)与(-1,j0)点的相对位置。
非线性系统特征方程:
N(A)G(s)+1=0
即N(A)G(s)=-1
或G(s)=-1/N(A)……负倒描述函数
稳定性为:
判别奈氏曲线G(jω)与负倒描述函数曲线-1/N(A)的相对位置。
若线性部分是最小相位环节,则系统稳定性判据为:
1、非线性系统稳定
判别方法:
G(jω)不包围-1/N(A)。
两曲线相距越远,系统越稳定。
2、非线性系统不稳定
判别方法:
G(jω)包围-1/N(A)。
3、自激振荡
a点:
不稳定的自激振荡
判别:
-1/N(A)随A增大窜入G(jω)包围圈(进入不稳定区)
b点:
稳定的自激振荡
判别:
-1/N(A)随A增大钻出G(jω)包围圈(进入稳定区)
求自激振荡频率ωb与幅值Ab方法:
方法一:
|G(jωb)|=|-1/N(Ab)|
∠G(jωb)=∠-1/N(Ab);
方法二:
由G(jωb)=-1/N(Ab)
令虚部与实部分别相等解之;
方法三:
由|N(Ab)G(jωb)|=1
∠N(Ab)G(jωb)=-π;
方法四:
由N(Ab)G(jωb)=-1
令虚部与实部分别相等解之
例:
试分析
非线性环节中k=2,a=1。
求:
1)K=15时非线性系统的运动;
2)欲使系统不出现自激振荡,确定K的临界值。
解:
1)
(1)作-1/N(A)曲线
查表得
A:
a~∞;N:
k~0;
-1/N:
-1/k~∞
当a=1,k=2
A=1~∞
N=2~0
-1/N=-0.5~-∞
j
注:
-1/N的增减趋势,可对N或-1/N求导的符号判别,见书中本例。
(2)作奈氏曲线
三阶G(s)=K/s(T1s+1)(T2s+1)
∠G(jω)=∠180o时的即G(jω)与负实轴相交处的穿越频率ωg:
ωg=1/√(T1T2)=1/√(0.1×0.2)=7.07
与负实轴交点
G(jωg)=-KT1T2/(T1+T2)
=-0.1×0.2×15/(0.1+0.2)=-1
如曲线①
(3)分析稳定性
奈氏曲线G(jω)与负倒描述函数曲线-1/N(A)交点(-1,j0),-1/N沿A增大方向进入稳定区,交点存在稳定的自激振荡。
自激振荡频率:
ω=ωg=7.07
自激振荡幅值:
由-1/N(A)=-1(=G(jωg))
(∵两曲线交点处幅值相等)
解得A=2.5
即自激振荡时非线性环节的输入信号为
e(t)=2.5sin7.07t
2)改变K使与-1/N(A)无交点,即
G(jωg)=-K×T1×T2/√(T1+T2)
=-0.02K/0.03>-0.5
K临界=0.5×0.3/0.02=7.5
如曲线②
{另解:
G(jω)随K值减增(15~7.5)而成比例向原点缩扩(-1~-0.5)。
}
例:
系统如图,试分析非线性系统的运动特性。
解:
1)作-1/N(A)曲线
查表得
由极值条件dN(A)/dA=0
解得Am=h√2
极值N(Am)=2M/(πh)=1.273
-1/N(Am)=-0.785
曲线如图
2)作G(jω)奈氏曲线
曲线如图,与负实轴穿越频率ωg
ωg=1/√(T1T2)=1/√(0.5×0.125)=4
与负实轴交点坐标:
G(jωg)=-KT1T2/(T1+T2)
=-10×0.5×0.125/(0.5+0.125)=-1
在(-1,j0)处奈氏曲线G(jω)与负倒描述函数曲线-1/N(A)有两个交点:
由G(jω)=-1/N(A)
或交点处幅值相等N(A)=1可解得:
1)A1=1.1;ω1=4
2)A2=2.3;ω2=4
由稳定性判据分析:
当A>A1:
产生稳定的自激振荡
x(t)=A2sinω2t=2.3sin4t
当A 不存在自激振荡。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 制动 控制 原理 PPT
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《包身工》教案设计精选文档.docx
《包身工》教案设计精选文档.docx
-
《赤壁赋》导学案.docx
-
《不是每个女生都有好几个后备军而是每个男生都会排好几个队》.docx
-
《春》学案1 1.docx
-
《基于NET的商品销售管理系统》开题报告.docx
-
《结构设计原理》复习资料1.docx
-
《牵引供电系统》习题.docx
-
《社会的构成》读书笔记.docx
-
《孙中山破陋习》教学设计三.docx
-
《微生物学教程周德庆》各章复习重点.docx
-
《中国文化》英语教程复习题及答案.docx
-
00安徽工贸职业技术学院毕业设计论文撰写规范试行1.docx
-
1承诺办理时限是什么概念实际办理的时间能不能比承诺办理时限.docx
-
1中小型压缩机安装施工工艺标准.docx
-
5第五章长期股权投资 单元测试.docx
-
6一株紫丁香.docx
-
#对完善我国监护法律制度立法的思考.docx
-
《 民间治病药方》.docx
-
《PremiereProCC影视编辑标准教程微课版》配套教学教学案.docx
-
《财务会计》相关复习题英文版.docx
-
《单片机原理及应用》黄友锐主编课后习题答案副本.docx
-
#2机组大修建议汇总.docx
-
《地心历险记》观后感600字600字读后感.docx
-
《供应链管理》习题和标准答案.docx
-
《黄山奇石》教学反思15篇.docx
-
《建筑施工技术》形成性考核册答案附题目.docx
-
《描绘小灯泡的伏安特性曲线》试题精选.docx
-
《人大监督法》讲稿子.docx
-
《阿西莫夫短文两篇》教案.docx
-
《地理标志产品保护工作细则》.docx
-
《工程质量检验标准》.docx
-
《化学反应的利用》鲁科版必修2.docx
-
中级汽车维修工考试题卷库答案解析文档格式.docx
-
初一英语下册教案文档格式.docx
-
自查保育员个人师德师风自查报告Word文档下载推荐.docx
-
单元测评一Unit 1 Great scientistsWord格式文档下载.docx
-
中考模拟专题汇编科学探究题Word格式文档下载.docx
-
最新精品幼儿教师招考试题三及答案1Word文档格式.docx
-
作风整顿讲话县委书记在全县作风整顿动员大会上的讲话文档格式.docx
-
中考中考百日誓师誓词十篇文档格式.docx
-
大学生实体店创业计划书共11页文档格式.docx
-
初中中考 语文仿写综合题解题方法和技巧及习题训练Word下载.docx
-
初二物理人教版新课程标准第七章力暑假基础巩固练习含答案Word文件下载.docx
-
资源昆虫学真题精选Word下载.docx
-
最新版本高考物理专题复习精品恒定电流学生版Word版Word文件下载.docx
-
《物流管理软件应用》之金蝶软件操作报告Word文件下载.docx
-
抽汽及高低加系统试题Word文档下载推荐.docx
-
最新钢轨探伤工技师职业技能鉴定题库1000题及答案Word文档下载推荐.docx
-
注水管理制度文档格式.docx
-
最新品牌早教中心商户合作谈判流程及内容计划方案Word格式文档下载.docx
-
《开国大典》教案Word文件下载.docx
