 完整版大森3i1数控车系统编程doc.docx
完整版大森3i1数控车系统编程doc.docx
- 文档编号:24323979
- 上传时间:2023-05-26
- 格式:DOCX
- 页数:43
- 大小:425.75KB
完整版大森3i1数控车系统编程doc.docx
《完整版大森3i1数控车系统编程doc.docx》由会员分享,可在线阅读,更多相关《完整版大森3i1数控车系统编程doc.docx(43页珍藏版)》请在冰豆网上搜索。
完整版大森3i1数控车系统编程doc
大森3i-l数控车床系统
编程篇
1.概述
本部分叙述了系统自动运行时所使用的NC语言。
首先是关于功能的理解,需要NC语言用法的时候请参照一下。
除工具补偿功能外,几乎所有的功能都可以在第四部分MDI模式下执行。
2.程序结构
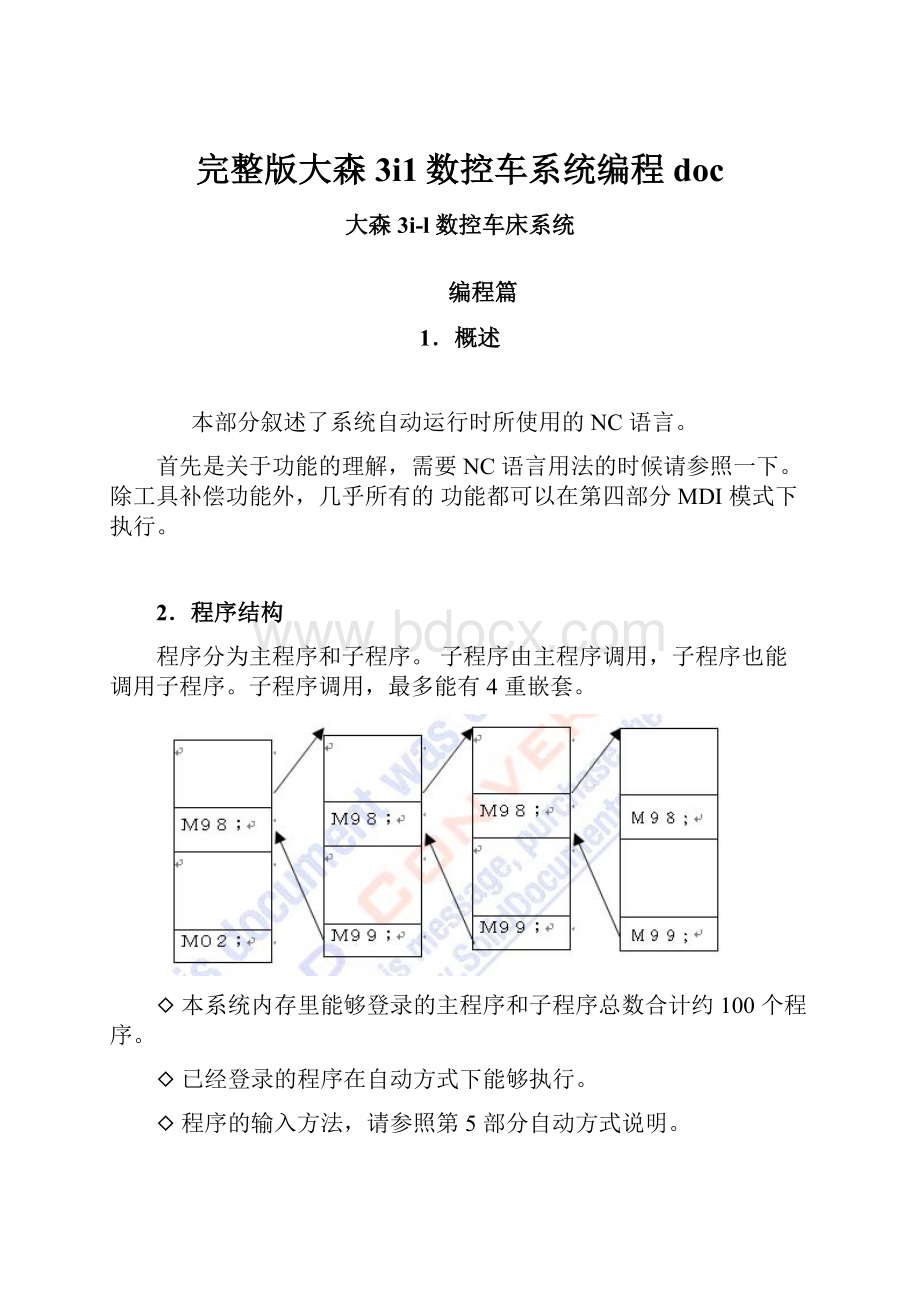
程序分为主程序和子程序。
子程序由主程序调用,子程序也能调用子程序。
子程序调用,最多能有4重嵌套。
◇本系统内存里能够登录的主程序和子程序总数合计约100个程序。
◇已经登录的程序在自动方式下能够执行。
◇程序的输入方法,请参照第5部分自动方式说明。
2.1程序段
程序中有几个指令构成的一组命令称为“程序段”。
程序段结束后,一定要插入结束码。
在EIA代码里,用“CR”表示结束码,在ISO代码里用“LF”来表示结束码,本说明书中用“;”代表结束码。
2.2字(地址码)
构成段的单位是一些字,或叫地址码。
下表中列出系统所使用的地址码。
功能
地址
内容
程序名称
O
程序名称
顺序号
N
顺序号码
准备功能
G
功能,动作指令
坐标指令
X,Z,I,K,Q,U,W,R
坐标指令,固定循环,
圆弧半径等
进给速度
F
进给速度命令
主轴速度
S
主轴速度命令
刀具功能
T
刀号、刀补号命令
辅助功能
M
机床开关量命令
暂停时间
P,X
暂停时间参数
子程序号
P
指定子程序号
重复次数
L
子程序重复次数
2.3输入方式
本系统的输入格式表示如下:
N4,G2,X+5.3,Z+5.3,I+5.3,K+5.3,P4,Q+5.3,R+5.3,L2,F6,M2,S4,T4等。
其中+代表有符号+或—。
5.3中的5代表整数部分有5位,小数部分有3位。
指令中有效数字前的“0”可以省略。
2.4小数点输入方式
输入格式中X+5.3表示X地址码可以输入小数点。
例如:
X100=X0.100
X100.=X100.000上例中最小移动单位是0.001mm。
有些地址禁止有小数点,否则会有报警显示。
最小位以下的小数值四舍五入处理。
当设定参数S0052的0位设定为1时,就变成计算器输入格式,不用书写小数点。
2.5程序名称
程序名用O字母+4位数字表示。
本系统中所能使用的程序名范围如下:
O0001~O7999
2.6顺序号
顺序号用N字母+4位数字组成。
当输入程序时,顺序号由系统自动生成,默认系统号每行增加10。
2.7选择性程序跳步
在段的开头插入“/n”记号后,当操作面板上的“选择性程序跳步n”开关打开时,从这段执行程序跳步,跳过n段。
当此开关“关”时,执行该段程序。
程序执行过程中,可以插入“/n”指令,此后的程序段执行跳步。
当此命令中n=1时,n可以省略。
3.控制轴和坐标系
3.2坐标系
本系统执行下面的三种坐标系。
(1)机械坐标系
(2)工件坐标系/本地坐标系
(3)相对坐标系
3.2.1机械坐标系它是把机床绝对原点作为坐标原点的机械固定的坐标系。
(1)设定机械坐标系
设定的详细方法,参照第二部分2.2节坐标原点的设定。
(2)机械坐标系中的移动指令。
本系统中,机械坐标系中的定位指令:
G53XxZz;其中:
(x,z)是目标指令值的机床坐标值。
详见本部分的4.14机械坐标系选择G53。
3.2.2工件坐标系/本地坐标系这是程序的基准坐标系。
在加工工件时一般选用此坐标系。
(1)工件坐标系的设定工件坐标系设定有两种方法,下面逐一介绍:
a.用程序指令来设定:
G50XxZz;这里用当前位置的坐标,设定为工件坐标系的坐标值(x,z)。
具体设定方法请参照本部分
4.12工件坐标系设定G50
b.手动方式下设定工件坐标系,请参照第二部分4.3手动方式坐标系的设定
(2)工件坐标系中的移动指令
用G00/G01编制定位指令,切削进给指令。
(除了本地坐标系有效的情况。
)例如:
G00XxZz;
其中:
(x,z)是轴移动的目标指令值。
具体的指令使用方法请参照本部分4.1位置定位(快速进给:
G00)。
(3)本地坐标系的设定
可以通过G指令代码指定本地坐标系。
指令的格式如下:
G52XxZz;这里把工件坐标系中的(x,z)点作为原点设定的坐标系。
这是在工件坐标系中建立的临时坐标系。
具体的指令使用方法,请参照本部分4.13本地座标系(G52)
(4)本地坐标系中的移动指令
当本地坐标系设定完成后,执行G00/G01命令编制的定位指令,切削进给指令变成本地坐标系中的坐标值。
可以参照本部分4.13本地座标系(G52)。
3.2.3相对坐标系当前位置作为坐标原点的坐标系。
因此,位移的终点坐标系在这个新的坐标系里要更改。
(1)相对坐标系的设定由于把当前位置作为坐标系的坐标原点,所以没有所谓“坐标系设定”的概念。
(2)相对坐标系中的移动指令用增量指令来表示相对坐标系,此后全部定位指令和切削指令都是用相对坐标系来表示的。
例如:
直线插补的程序
G01UxWzF;其中:
(x,z)为进给指令的目标值增量。
具体的指令使用方法,请参照本部分4.2直线插补(G01)。
3.3进给功能
这里说明自动方式下的进给速度和快移速度。
3.3.1快移速度
各轴的快移速度可以用参数设定,X轴的快移速度用参数S0120设定,Z轴的快移速度用参数S0122设定。
最快的快移速度为15米/分或600英寸/分。
3.3.2快移的速度倍率
快移的速度倍率有F0,25%,50%,100%四档,其中F0档的速度值用参数S0146?
来设定。
另外,如果设定参数S0011为1,快移的速度倍率就与切削移动倍率兼用,那么快移倍率就
能在0~100%之间变化,每档增加10%。
3.3.3切削的进给速度
(1)分进给G98
刀具在每分钟内的进给量,用F指令表示,在下面的表格中,切削进给速度的上限用参数
S0124来设定。
(2)转进给G99
转进给是指定主轴每转的切削进给量的指令。
其进给指令仍用F表示,在下面的表格中,切削进给速度的上限用参数S0124来设定。
用下面的式子可以把转进给换算成分进给:
分进给速度=转进给速度×主轴转速。
在使用转进给时,主轴必须安装速度编码器。
G21公制
G20英制
G98分进给
1~15000mm/分
0.01~600.00英寸/分
G99转进给
0.01~500.00mm/分
0.001~50.0000英寸/分
(3)切削速度的进给倍率
切削速度可用控制面板上的倍率开关控制,倍率可以在0~200%之间变化,每档增加或减少10%。
3.3.4进给速度的1/10
可以使用参数设定,使用公制单位时的分进给量最小的单位变成0.0001mm,这时F之范围是1~15000,相当于0.1~1500mm/分。
3.3.5F1位指令
F1位指令可以根据参数(S0135)设定,F1继续有效,JOG进给速度开关指定的进给速度有效。
指定F0的话,参数(S0120~S0123)的快移速度有效,并且在参数(S0135)设定时,可以使用F1~F9对应参数的进给速度。
具体设定方法请参照参数部分S0135。
◇倍率、空运行、快速进给开关有效。
◇G99(每转进给)时,F1功能无效。
3.3.6自动加减速
依靠设定的加减速时间常数,在位移开始和结束时系统实现自动加减速功能,来克服机械惯性带来的不便。
自动加减速在不同的加工过程,其需要的设定可能不同,比如:
定位时:
可选直线或指数型升降速。
直线插补:
可选指数型升降速。
圆弧插补:
没有。
点动时:
可选直线或指数型升降速。
升降速特性通常都有效,除了急停以外。
加减速时间常数可以在参数S0160~S0176设定。
具体的设定方法请参照参数部分。
4.准备功能(G指令)
准备功能是G二位数指令,G指令分成二种类型,一种G指令是只在本程序段内有效,这样的G指令称为短指令,另一种G指令是从本段开始至到同组内的G代码出现前一直有效的,这样的G指令被称为模态指令。
4.1位置定位(快速进给:
G00)
(1)功能和目的该指令伴随坐标名称,以现在位置为起始点,坐标名称所表示的为终点坐标,以直线或非直线的路径作位置定位。
(2)绝对坐标系中的指令格式
G00XxZz;其中:
小写的(x,z)指工件坐标系中的终点坐标值。
(3)相对坐标系中的指令格式
G00UxWz;其中:
小写的(x,z)指相对坐标系中的终点坐标值。
◇定位指令应在1程序段中同时指定到二个轴的指令。
◇定位指令时,各坐标轴按参数设定的快移速度到达终点,中间的移动轨迹不一定是直线。
◇定位指令时,在参数(S0160,S0162)设定快移时间常数。
此指令执行后,减速到
达终点,并进行定位检查。
然后进行下一程序段。
定位误差由参数设定。
◇加减速的类型,可用参数设定成直线型或指数型。
参数S0164,S0166设定指数型加减速(升降速)时间常数。
能平滑地起停,减少机械方面的应力。
(详见“参数部分”有关内容。
)
(4)注意:
◇一旦给予该指令,该G00模式一直保持有效,直到G01,G02,G03,G32指令出现,才更改G00的模式,因此,假如次指令也同样是G00,则只需指定坐标轴和目标值即可。
◇在G码后面没有数值时,以G00处理。
4.2直线插补(G01)
(1)功能和目的该指令有坐标名称和进给速度指令,以现在位置为起始点,坐标名称所表示的为终点坐标,以地址F指定的速度移动。
F所指的速度通常以刀尖中心进行方向的线速度。
(2)绝对坐标系中的直线插补指令格式
G01XxZzCcFf;其中:
小写的(x,z,c)是工件坐标系中终点的坐标值。
(3)相对坐标系中的直线插补指令格式
G01UxWzFf;其中:
◇小写的(x,z)是相对坐标系中终点的坐标值。
◇按F所给定的速度,从始点到终点按直线轨迹移动。
◇F码是模态指令,一直至重新设定F值以前,始终有效。
(4)注意:
◇二个直线插补段之间,有可能出现圆角。
为了避免这种圆角过渡,在这二个段之间,适当增加一段暂停时间(G04)。
◇由于每个进给轴的加减速特性不一样,会影响加工形状,请参考“参数设定”部分的详细说明。
◇一旦给予该指令,该G01模式一直保持有效,直到G00,G02,G03,G32指令出现,才更改G01的模式,因此,假如次指令也同样是G01且进给速度不改变,则只需指定坐标值即可。
4.3圆弧插补(G02,G03)
(1)功能和目的此指令使刀具沿着圆弧方向移动
(2)指令格式
设定圆心坐标(I,K)
G02XxZzIiKkFf;
G02UxWzIiKkFf;
G03XxZzIiKkFf;
G03UxWzIiKkFf;
其中:
G02顺时针插补。
G03逆时针插补。
小写的(x,z)指圆弧的终点坐标。
小写的(i,k)指圆心的增量坐标值。
小写的(f)指x和z速度的合成速度。
【注意】如果始点和终点不在同一个圆弧上,将显示错误信息。
(3)半径设定R
圆弧插补也能用圆弧半径R和终点坐标来编程。
编程格式:
G02XxZzRrFf;
G02UxWzRrFf;
G03XxZzRrFf;
G03UxWzRrFf;
其中:
G02顺时针插补
G03逆时针插补小写的(x,z)指圆弧的终点坐标。
小写的r指圆弧的半径设定。
当r>0时,指00~1800的圆弧
当r<0时,指1800~3600的圆弧小写的f指X轴和Z轴进给的合成速度。
◇如果是3600圆弧时,请用(I,K)指令
(4)详细说明
该G02(G03)模式一直保持有效,直到01群的G00,G01,G32出现,才改变G02(G03)的模式。
圆弧的回转方向用G02,G03来区別。
G02:
CW(顺时针方向)
G03:
CCW(逆时针方向)
4.5暂停G04
G04指令是在下个单节开始执行前,延迟一段指定时间。
(1)功能及目的等待指定的时间后才执行下个单节。
(2)指令格式G04PpG04Xx
例如:
G04P5;暂停5毫秒。
G04X50;暂停50毫秒。
G04X5.;暂停5秒。
如果参数S0052第0位设成1,则X的时间单位变成秒,P的指令单位不变。
即省略小数点以后,时间单位改变。
(3)详细说明
1)暂停时间如下表所示:
输入设定单位
位址X的指令范围
位址P指令范围
0.001mm
0.001~9999.999(秒)
0.001~9999.999(秒)
0.0001inch
0.0001~999.9999(秒)
0.0001~999.9999(秒)
2)暂停指令的前单节为切削指令时,在减速和停止完了后,才开始計算暂停时间。
如
在同一单节有M,S,T,B指令时均同时开始动作。
3)机械锁住时,暂停功能亦有效。
4.6精定位G09
(1)功能及目的刀具的进给速度急促变化时,防止机械的振动及转角切削时,防止圆角的发生;机械减速停止,位置到达状况确认后,次一单节的指令才开始执行。
能达成这些目的的功能为正确停止检查功能。
(2)指令格式
G09G01(G02,?
G03);
正确停止检查G09,仅有效于同一单节的切削指令(G01~G03)。
4.7英制指令/公制指令转换(G20,G21)
(1)功能及目的
用G指令來变更英制指令或公制指令。
(2)指令格式
G20:
英制指令
G21:
公制指令
G20,G21都是模态指令。
(3)详细说明
G20,G21仅转换指令单位,输入单位不转换。
G20,G21的转换为直线轴,回转轴的使用为无效。
(例1)输入指令单位和G20/G21的关系。
轴
输入指令单
位型式(cunit
指令例
)
G21
G20
X
Z
10
10
X100;
Z100;
0.100mm
0.100mm
0.254mm
0.254mm
4.8存储行程极限2(G22、G23)
在参数S0608~S0613或程序中,可以进行禁区的设定。
参数S0060可以指定范围的内侧还是外侧作为禁区。
(1)存储行程极限2功能的开/关
G22:
存储行程极限2功能的打开G23:
存储行程极限2功能的关闭
(2)由程序来进行禁止领域的设定/变更G22_Xx_Zz_Ii_Kk;
◇(x,z)及(i,k)设定机械坐标系的坐标值。
◇由参数设定值来设定禁止领域,机械原点位置作为0点的坐标系进行设定。
◇电源输入时,G22模式可以由电源输入时的模式选择(S0050---bit7)来设定。
电源输入时转换G22模式,启动后想让它无效的话,参数的禁区设定在行程外设定,禁区选择(S0060---bit0)请在外面设定。
◇G22、G23单独段落指定。
◇如果G22中没有禁区设定的话,使用参数设定值。
由x,z,i,k来设定的禁区,如果参数变更就会变换为参数设定值,请注意。
◇存储行程极限机能,机械坐标系被设定后有效。
◇进入禁区时,利用手动运转模式的[方向键][手轮]等,可以往移动方向和反方向移动。
◇禁区选择(S0060---bit0)在内部时,在禁区内指令G22,全轴‘十’‘一’都会出现极限错误,刀架也不能动。
G23指令时,让存储行程功能2关闭,移动到禁止领域外后请指令G22。
4.9参考点(原点)复归(G28~G30)
功能及目的
1)G28指令为用G00指令已定位的指令轴,依G28指令做快速移动,复归至第1参考点(原点)。
2)G29指令与G28或G30的中间点为各轴独立,依G00做高速位置定位。
4.9.1参考点复归(G28)
G28XxZz;其中:
小写的(x,z)是返零的中间点的坐标,系统会记忆中间点坐标。
G28UxWz;其中:
小写的(x,z)是返零的中间点的增量坐标,系统会记忆中间点坐标
◇如果仅有G28指令,而没有中间点坐标,那么以前记忆的中间点坐标作为本次的中间点坐标。
另外,在执行本命令前,刀补值必须事先清除。
4.9.2从参考点返回G29
经过G28所指定的中间点,返回到指定轴的坐标点。
可以根据指令格式来决定它的坐标值。
指令格式:
G29XxZz;中间点(x,z)是机械坐标系。
(1)详细说明
◇电源投入后,如没有执行参考点(原点)复归(G28),则执行G29时,会发生程序错误报警。
◇参考点复归后,刀具长和补正量暂时取消,中间点是补正位置
◇在机械锁定状态,做参考点复归后,从中间点到参考点无效。
指令轴到达中间点,就执行下个单节。
4.9.3返回第2~4参考点(G30)
(1)功能及目的
G30P2(P3,P4)指令的指定,第2、第3或第4参考点(原点)位置的复归可以执行。
(2)指令格式
根据G30指令,能够向指定轴的参考点返回。
第2至第4参考点的坐标位置预先用参数S0670~S0680设定。
当使用绝对指令时,指令格式为:
G30P2XxZz;
G30P3XxZz;
G30P4XxZz;
其中:
小写的(x,z)指中间点位置坐标。
P2选第2参考点。
(可以省略)
P3选第3参考点。
P4选第4参考点。
当使用相对指令时,指令格式为:
G30P2UxWz;
G30P3UxWz;
G30P4UxWz;
其中:
小写的(x,z)指中间点位置增量坐标。
P2选第2参考点。
(可以省略)
P3选第3参考点。
P4选第4参考点。
(3)详细说明
1)第2、第3或第4参考点(原点)的复归以P2、P3或P4指令,P指令无或P0、P1、P5以上的值指定时无视,皆以第2参考点(原点)复归执行。
2)第2、第3或第4参考点(原点)的复归与第1参考点(原点)复归情形一样,经由G30指定的中间点以后,复归至第2、第3或第4参考点(原点)的位置。
3)第2、第3或第4参考点(原点)位置坐标是机械固有的位置,可以在设定显示裝置上确认。
4)第2、第3或第4参考点(原点)复归后,G29指令执行时,G29复归时的中间点位置是最后执行参考点(原点)复归的中间点位置。
5)刀具径补偿中的平面参考原点(原点)复归,中间点起变成刀具径补偿无(补偿零)
的移动。
其后的G29指令,从参考点(原点)起至中间点,刀具径补偿无效情況下移动,直到中间点G29指令为止。
6)第2参考点(原点)复归后,轴的刀具长补偿量变成暂时取消状态。
7)在机械锁住状态中,第2参考点(原点)复归从中间点起至参考点(原点)为止的控制无视,指令轴到达中间点后即执行次一单节。
◇注意,由于采用不同的坐标系,中间点坐标也应随之改变。
◇每次使用G28或G30时,如果某个坐标设有中间点值,例如单轴X或Z返零,而执行G29指令又是双轴返回时,会发生错误报警。
另外中间点值一直保持到系统断电。
(见G28~G30详细说明。
)
◇G28返回第1参考点,通常就是机械坐标系的原点。
(S666~S668是0。
)可以通过重新设定参数的值来改变原点的位置。
◇G30所指定的第2~4参考点位置,它们与第1参考点的距离,可用参数来设定。
4.10跳转功能(G31)
指令:
G31
例如:
G31X10.Z100.P1F500
G31X10.Z100.P2F500
G31X10.Z100.P3F500
G31X10.Z100.P4F500
P1、P2、P3、P4分别代表4个跳跃信号,对应系统接点I/O1100~1103,请连接相关开关信号至系统主板接口CN13。
4.11螺纹切削(G32)
(1)概要
G32指令是以主轴旋转和刀具进给同步执行等螺距的直线螺纹切削加工、斜螺纹切削加工和连续螺纹切削加工。
(2)指令格式
G32_Xx_Zz_Ff(Ee);
G32_Ux_Wz_Ff(Ee);
G32_Xx_Zz_Ff(Ee)_Qq;
G32_Ux_Wz_Ff(Ee)_Qq;
◇(x,z)是在工件坐标系或相对坐标系中螺纹切削的终点坐标值。
◇f是螺纹的螺距长。
◇e是每英寸的牙数。
◇q是螺纹切削开始时的主轴C相角度。
可以指定0°~360°的范围。
起始角Q不是模态值,每次使用必须指定,如不指定默认为“0”。
◇一般加工一段螺纹的时候,从切削到完成,要按相同的路线进行几次的切削。
在螺纹切削开始时,检查出从主轴光电编码器Z相信号后开始移动。
◇在螺纹切削时、进给倍率是无效的,其被固定为?
100%。
(3)详细说明
◇锥螺纹的螺距是由长轴方向的螺距指定。
◇锥螺纹切削指令和螺旋状螺纹切削指令使用时,不可在线速度一定的状态下使用。
◇从粗切削到精切削,主轴的转速必须一定。
◇在螺纹切削中,如使用暂停,则螺纹会损坏,所以在螺纹切削中时,不能使用暫停。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 完整版 i1 数控 系统 编程 doc
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《包身工》教案设计精选文档.docx
《包身工》教案设计精选文档.docx
-
《赤壁赋》导学案.docx
-
《不是每个女生都有好几个后备军而是每个男生都会排好几个队》.docx
-
《春》学案1 1.docx
-
《基于NET的商品销售管理系统》开题报告.docx
-
《结构设计原理》复习资料1.docx
-
《牵引供电系统》习题.docx
-
《社会的构成》读书笔记.docx
-
《孙中山破陋习》教学设计三.docx
-
《微生物学教程周德庆》各章复习重点.docx
-
《中国文化》英语教程复习题及答案.docx
-
00安徽工贸职业技术学院毕业设计论文撰写规范试行1.docx
-
1承诺办理时限是什么概念实际办理的时间能不能比承诺办理时限.docx
-
1中小型压缩机安装施工工艺标准.docx
-
5第五章长期股权投资 单元测试.docx
-
6一株紫丁香.docx
-
#对完善我国监护法律制度立法的思考.docx
-
《 民间治病药方》.docx
-
《PremiereProCC影视编辑标准教程微课版》配套教学教学案.docx
-
《财务会计》相关复习题英文版.docx
-
《单片机原理及应用》黄友锐主编课后习题答案副本.docx
-
#2机组大修建议汇总.docx
-
《地心历险记》观后感600字600字读后感.docx
-
《供应链管理》习题和标准答案.docx
-
《黄山奇石》教学反思15篇.docx
-
《建筑施工技术》形成性考核册答案附题目.docx
-
《描绘小灯泡的伏安特性曲线》试题精选.docx
-
《人大监督法》讲稿子.docx
-
《阿西莫夫短文两篇》教案.docx
-
《地理标志产品保护工作细则》.docx
-
《工程质量检验标准》.docx
-
《化学反应的利用》鲁科版必修2.docx
-
最新国际学校专题+转型素质教育深度研究.docx
-
最新基于脑科学的课堂教学培训材料11.docx
-
最新教师资格证考试《幼儿综合素质》单选模拟试题及答案.docx
-
各种水管材料的区别.docx
-
给排水施工方案1.docx
-
工程部管理制度行政部发.docx
-
工程监理论文3篇.docx
-
最新苏科苏教八年级物理下册第二学期期末试题及答案.docx
-
工程造价管理体系大全.docx
-
工商管理毕业实习报告范文五篇.docx
-
最新医学生物化学第四部分.docx
-
最新招聘社区工作者面试题及答案.docx
-
公共图书馆的理念和深图服务立馆的方针.docx
-
政府门户网站详细建设方案.docx
-
支行行长述职报告.docx
-
10KV架空线路施工标准方案.docx
-
13通用能力测评笔试题.docx
-
职专语文题库参考答案备课讲稿.docx
-
至客运班线经营权投标文件.docx
