 电气自动化技术《实训10单容液位定值控制系统》.docx
电气自动化技术《实训10单容液位定值控制系统》.docx
- 文档编号:24053014
- 上传时间:2023-05-23
- 格式:DOCX
- 页数:9
- 大小:466.92KB
电气自动化技术《实训10单容液位定值控制系统》.docx
《电气自动化技术《实训10单容液位定值控制系统》.docx》由会员分享,可在线阅读,更多相关《电气自动化技术《实训10单容液位定值控制系统》.docx(9页珍藏版)》请在冰豆网上搜索。
电气自动化技术《实训10单容液位定值控制系统》
实训单容液位定值控制系统
一、实验目的
1.了解单容液位定值控制系统的结构与组成。
2.掌握单容液位定值控制系统调节器参数的整定和投运方法。
3.研究调节器相关参数的变化对系统静、动态性能的影响。
4.了解P、PI、PD和PID四种调节器分别对液位控制的作用。
5.掌握同一控制系统采用不同控制方案的实现过程。
二、实验设备
1.实验对象及控制屏、SA-01挂件一个、SA-02挂件一个、SA-11挂件一个、计算机一台、万用表一个;
2.SA-12挂件一个、RS485/232转换器一个、通讯线一根;
3.SA-22挂件一个、SA-23挂件一个;
4.SA-44挂件一个、PC/PPI通讯电缆一根。
三、实验原理
〔一〕单回路控制系统的概述
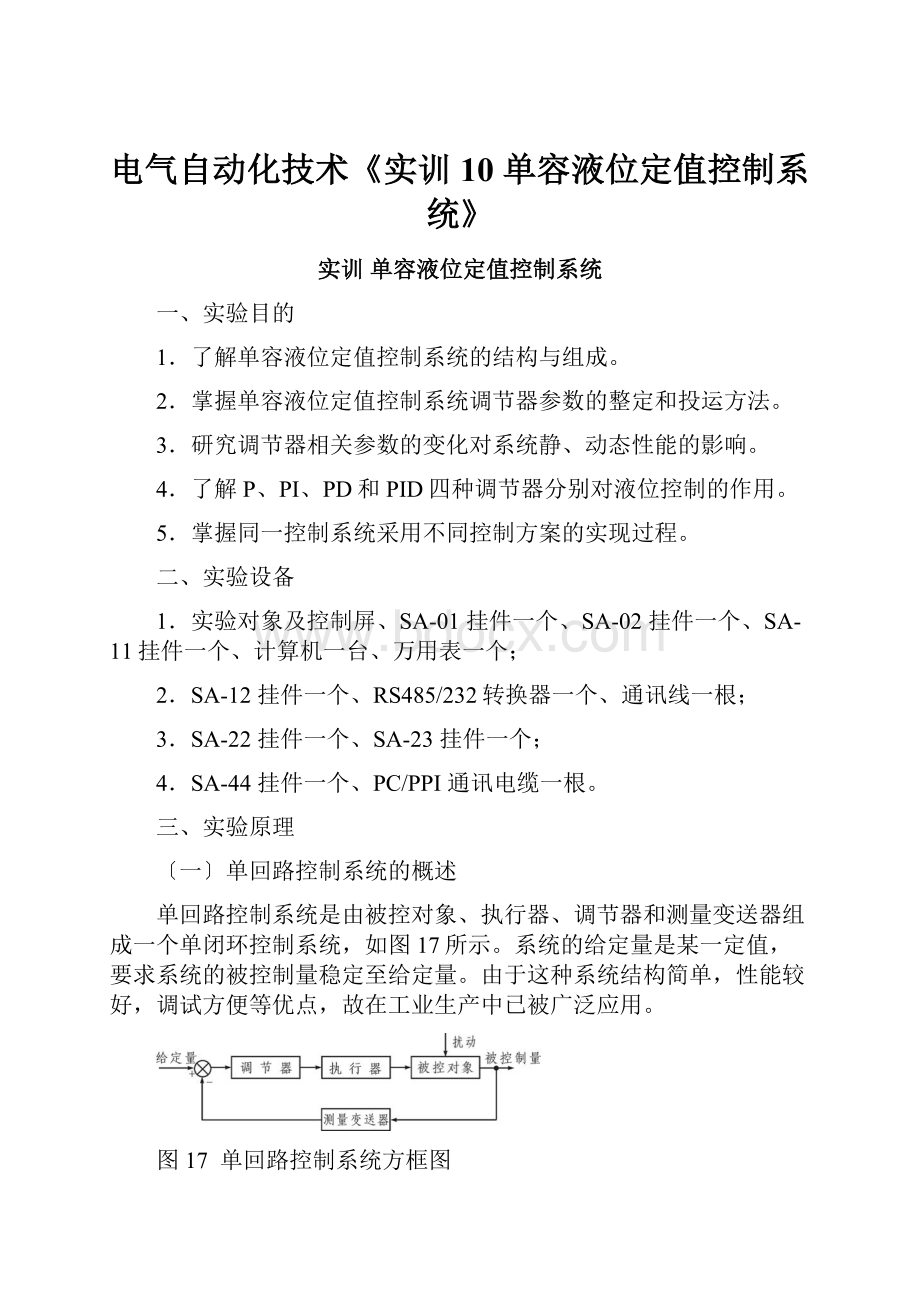
单回路控制系统是由被控对象、执行器、调节器和测量变送器组成一个单闭环控制系统,如图17所示。
系统的给定量是某一定值,要求系统的被控制量稳定至给定量。
由于这种系统结构简单,性能较好,调试方便等优点,故在工业生产中已被广泛应用。
图17单回路控制系统方框图
〔二〕干扰对系统性能的影响
1.干扰通道的放大系数、时间常数及纯滞后对系统的影响。
干扰通道的放大系数Kf会影响干扰加在系统中的幅值。
假设系统是有差系统,那么干扰通道的放大系数愈大,系统的静差也就愈大。
如果干扰通道是一惯性环节,令时间常数为Tf,那么阶跃扰动通过惯性环节后,其过渡过程的动态分量被滤波而幅值变小。
即时间常数Tf越大,那么系统的动态偏差就愈小。
通常干扰通道中还会有纯滞后环节,它使被调参数的响应时间滞后一个τ值,但不会影响系统的调节质量。
2.干扰进入系统中的不同位置。
复杂的生产过程往往有多个干扰量,它们作用在系统的不同位置,如图18所示。
同一形式、大小相同的扰动作用在系统中不同的位置所产生的静差是不一样的。
对扰动产生影响的仅是扰动作用点前的那些环节。
图18扰动作用于不同位置的控制系统
〔三〕控制规律的选择
PID控制规律及其对系统控制质量的影响已在有关课程中介绍,在此将有关结论再简单归纳一下。
1.比例〔P〕调节
纯比例调节器是一种最简单的调节器,它对控制作用和扰动作用的响应都很快。
由于比例调节只有一个参数,所以整定很方便。
这种调节器的主要缺点是系统有静差存在。
其传递函数为:
式中KP为比例系数,δ为比例带。
2.比例积分〔PI〕调节
PI调节器就是利用P调节快速抵消干扰的影响,同时利用I调节消除残差,但I调节会降低系统的稳定性,这种调节器在过程控制中是应用最多的一种调节器。
其传递函数为:
式中TI为积分时间。
3.比例微分〔PD〕调节
这种调节器由于有微分的超前作用,能增加系统的稳定度,加快系统的调节过程,减小动态和静态误差,但微分抗干扰能力较差,且微分过大,易导致调节阀动作向两端饱和。
因此一般不用于流量和液位控制系统。
PD调节器的传递函数为:
式中TD为微分时间。
4.比例积分微分〔PID〕调节器
PID是常规调节器中性能最好的一种调节器。
由于它具有各类调节器的优点,因而使系统具有更高的控制质量。
它的传递函数为
图19表示了同一对象在相同阶跃扰动下,采用不同控制规律时具有相同衰减率的响应过程。
图19各种控制规律对应的响应过程
〔四〕调节器参数的整定方法
调节器参数的整定一般有两种方法:
一种是理论计算法,即根据广义对象的数学模型和性能要求,用根轨迹法或频率特性法来确定调节器的相关参数;另一种方法是工程实验法,通过对典型输入响应曲线所得到的特征量,然后查照经验表,求得调节器的相关参数。
工程实验整定法有以下四种:
〔1〕经验法
假设将控制系统按照液位、流量、温度和压力等参数来分类,那么属于同一类别的系统,其对象往往比拟接近,所以无论是控制器形式还是所整定的参数均可相互参考。
表4为经验法整定参数的参考数据,在此根底上,对调节器的参数作进一步修正。
假设需加微分作用,微分时间常数按
计算。
〔2〕临界比例度法
这种整定方法是在闭环情况下进行的。
设TI=∞,TD=0,使调节器工作在纯比例情况下,将比例度由大逐渐变小,使系统的输出响应呈现等幅振荡,如图20所示。
根据临界比例度δk和振荡周期TS,按表5所列的经验算式,求取调节器的参考参数值,这种整定方法是以得到4:
1衰减为目标。
表4经验法整定参数
临界比例度法的优点是应用简单方便,但此法有一定限制。
首先要产生允许受控变量能承受等幅振荡的波动,其次是受控对象应是二阶和二阶以上或具有纯滞后的一阶以上环节,否那么在比例控制下,系统是不会出现等幅振荡的。
在求取等幅振荡曲线时,应特别注意控制阀出现开、关的极端状态。
图20具有周期TS的等幅振荡
表5临界比例度法整定调节器参数
〔3〕衰减曲线法〔阻尼振荡法〕
在闭环系统中,先把调节器设置为纯比例作用,然后把比例度由大逐渐减小,加阶跃扰动观察输出响应的衰减过程,直至出现图21所示的4:
1衰减过程为止。
这时的比例度称为4:
1衰减比例度,用δS表示之。
相邻两波峰间的距离称为4:
1衰减周期TS。
根据δS和TS,运用表6所示的经验公式,就可计算出调节器预整定的参数值。
图214:
1衰减曲线法图形
表6衰减曲线法计算公式
本实验系统结构图和方框图如图22所示。
被控量为中水箱〔也可采用上水箱或下水箱〕的液位高度,实验要求中水箱的液位稳定在给定值。
将压力传感器LT2检测到的中水箱液位信号作为反应信号,在与给定量比拟后的差值通过调节器控制电动调节阀的开度,以到达控制中水箱液位的目的。
为了实现系统在阶跃给定和阶跃扰动作用下的无静差控制,系统的调节器应为PI或PID控制。
图22中水箱单容液位定值控制系统
(a)结构图(b)方框图
四、实验内容与步骤
本实验选择中水箱作为被控对象。
实验之前先将储水箱中贮足水量,然后将阀门F1-1、F1-7、F1-11全开,将中水箱出水阀门F1-10开至适当开度,其余阀门均关闭。
1.将“SA-12智能调节仪控制〞挂件挂到屏上,并将挂件的通讯线插头插入屏内RS485通讯口上,将控制屏右侧RS485通讯线通过RS485/232转换器连接到计算机串口,并按照图23连接实验系统。
将“LT2中水箱液位〞钮子开关拨到“ON〞的位置。
2.接通总电源空气开关和钥匙开关,翻开24V开关电源,给压力变送器上电,按下启动按钮,合上单相Ⅰ、单相Ⅲ空气开关,给智能仪表及电动调节阀上电。
3.整定并校调压力变送器。
同时设置调节仪参数:
Sn=33,Ctrl=1,CF=0〔反作用调节〕,DIL=0,DIH=50.0,ADDR=1。
4.翻开上位机MCGS组态环境,翻开“智能仪表控制系统〞工程,然后进入MCGS运行环境,在主菜单中点击“实验三、单容液位定值控制系统〞,进入实验三的监控界面。
5.在上位机监控界面中点击“启动仪表〞。
将智能仪表设置为“手动〞,并将设定值和输出值设置为一个适宜的值,此操作可通过调节仪表实现。
6.合上三相电源空气开关,磁力驱动泵上电打水,适当增加/减少智能仪表的输出量,使中水箱的液位平衡于设定值。
7.按经验法或动态特性参数法整定调节器参数,选择PI控制规律,并按整定后的PI参数进行调节器参数设置。
8.待液位稳定于给定值后,将调节器切换到“自动〞控制状态,待液位平衡后,通过以下几种方式加干扰:
图23智能仪表控制单容液位定值控制实验接线图
〔1〕突增〔或突减〕仪表设定值的大小,使其有一个正〔或负〕阶跃增量的变化;〔此法推荐,后面三种仅供参考〕
〔2〕将电动调节阀的旁路阀F1-4开至适当开度;
〔3〕将下水箱进水阀F1-8开至适当开度;〔改变负载〕
〔4〕接上变频器电源,并将变频器输出接至磁力泵,然后翻开阀门F2-4,用变频器支路以较小频率给中水箱打水。
以上几种干扰均要求扰动量为控制量的5%~15%,干扰过大可能造成水箱中水溢出或系统不稳定。
参加干扰后,水箱的液位便离开原平衡状态,经过一段调节时间后,水箱液位稳定至新的设定值〔采用后面三种干扰方法仍稳定在原设定值〕,记录此时的智能仪表的设定值、输出值和仪表参数,液位的响应过程曲线将如图24所示。
9.分别适量改变调节仪的P及I参数,重复步骤7,用计算机记录不同参数时系统的阶跃响应曲线。
图24单容水箱液位的阶跃响应曲线
10.分别用P、PD、PID三种控制规律重复步骤4~8,用计算机记录不同控制规律下系统的阶跃响应曲线。
五、实验报告要求
1.画出单容水箱液位定值控制实验的结构框图。
2.用实验方法确定调节器的相关参数,写出整定过程。
3.根据实验数据和曲线,分析系统在阶跃扰动作用下的静、动态性能。
4.比拟不同PID参数对系统的性能产生的影响。
5.分析P、PI、PD、PID四种控制规律对本实验系统的作用。
6.综合分析五种控制方案的实验效果。
六、思考题
1.如果采用下水箱做实验,其响应曲线与中水箱的曲线有什么异同?
并分析差异原因。
2.改变比例度δ和积分时间TI对系统的性能产生什么影响?


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 实训10 单容液位定值控制系统 电气自动化技术实训10 单容液位定值控制系统 电气 自动化 技术 实训 10 单容液位定值 控制系统
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《酒店人力资源管理》教案.docx
《酒店人力资源管理》教案.docx
-
《马克思主义基本原理概论》选择题复习题.docx
-
《全国100所名校示范卷》高三生物人教版西部卷一轮复习 第十五单元 《稳态与环境》综合检测.docx
-
《1吨有多重》教学设计反思及评点2篇.docx
-
《红飘带狮王》读书笔记.docx
-
《教综》真题答案.docx
-
《企业管理》复习题发学生.docx
-
《提高数学学困生的学习兴趣研究》课题工作总结报告.docx
-
《蟋蟀的住宅》的教学设计.docx
-
《园林建筑设计》教案.docx
-
《中西医结合内科学》精华笔记.docx
-
2三轴向加速度传感器长春汽车工业高等专科学校.docx
-
04装修工程施工合同.docx
-
5套打包四年级数学上期中考试单元综合练习题含答案解析.docx
-
《食品安全法》知识竞赛题目及答案.docx
-
《24式简化太极拳》简案.docx
-
《金融理论与实务》复习大纲.docx
-
《旅游地理》学案.docx
-
《企业集团财务管理》综合练习题参考答案11春.docx
-
《实践论》原文毛泽东.docx
-
《项目管理软件》课程复习题.docx
-
《员工手册》电子版范文.docx
-
《中小学布局整改措施》.docx
-
5旋风分离器安装.docx
-
10kV跨越架搭设施工方案设计.docx
-
#市关爱儿童服务中心暨救助站改造工程项目建议书.docx
-
《毛概》课程标准.docx
-
《人民日报》学习贯彻党的十七届四中全会精神系列.docx
-
《我的军训生活》作文800字.docx
-
《研发人员绩效考核奖励办法》.docx
-
1 《道路交通安全法》规定任何单位或者个人不得收缴机.docx
-
02电气检修规程.docx
-
《管理心理学》课程标准Word文档格式.docx
-
PET的合成及生产工艺文档格式.docx
-
keil详细安装及使用1Word格式文档下载.docx
-
PPPOE协议技术与标准培训教材Word下载.docx
-
办文办会办事的一般要求教学内容Word下载.docx
-
openwrt系统用AP+WDS模式搭建无线中继详细教程Word下载.docx
-
QGDW572计量用低压电流互感器技术规范Word文档下载推荐.docx
-
第3讲 常见的烃.docx
-
爆炸评价模型与伤害半径计算Word文件下载.docx
-
安全生产检查总表资料.docx
-
电气专业实习日记.docx
-
SCI论文格式通用版Word文档格式.docx
-
安徽省蒙城县第一中学学年高一上学期零班部第三次月考语文试题Word下载.docx
-
SpringMvc整合DWR30Word格式.docx
-
vis设计价格表Word文档格式.docx
-
XX建筑工地保安管理服务职责及执行规章方案Word下载.docx
-
A 词组Word文件下载.docx
-
13季节ARIMA模型Word格式文档下载.docx
-
XX省联通互联网专业维护技能竞赛试题解析Word文档下载推荐.docx
