 龙门起重机ANSYS分析.docx
龙门起重机ANSYS分析.docx
- 文档编号:24007704
- 上传时间:2023-05-23
- 格式:DOCX
- 页数:12
- 大小:26.51KB
龙门起重机ANSYS分析.docx
《龙门起重机ANSYS分析.docx》由会员分享,可在线阅读,更多相关《龙门起重机ANSYS分析.docx(12页珍藏版)》请在冰豆网上搜索。
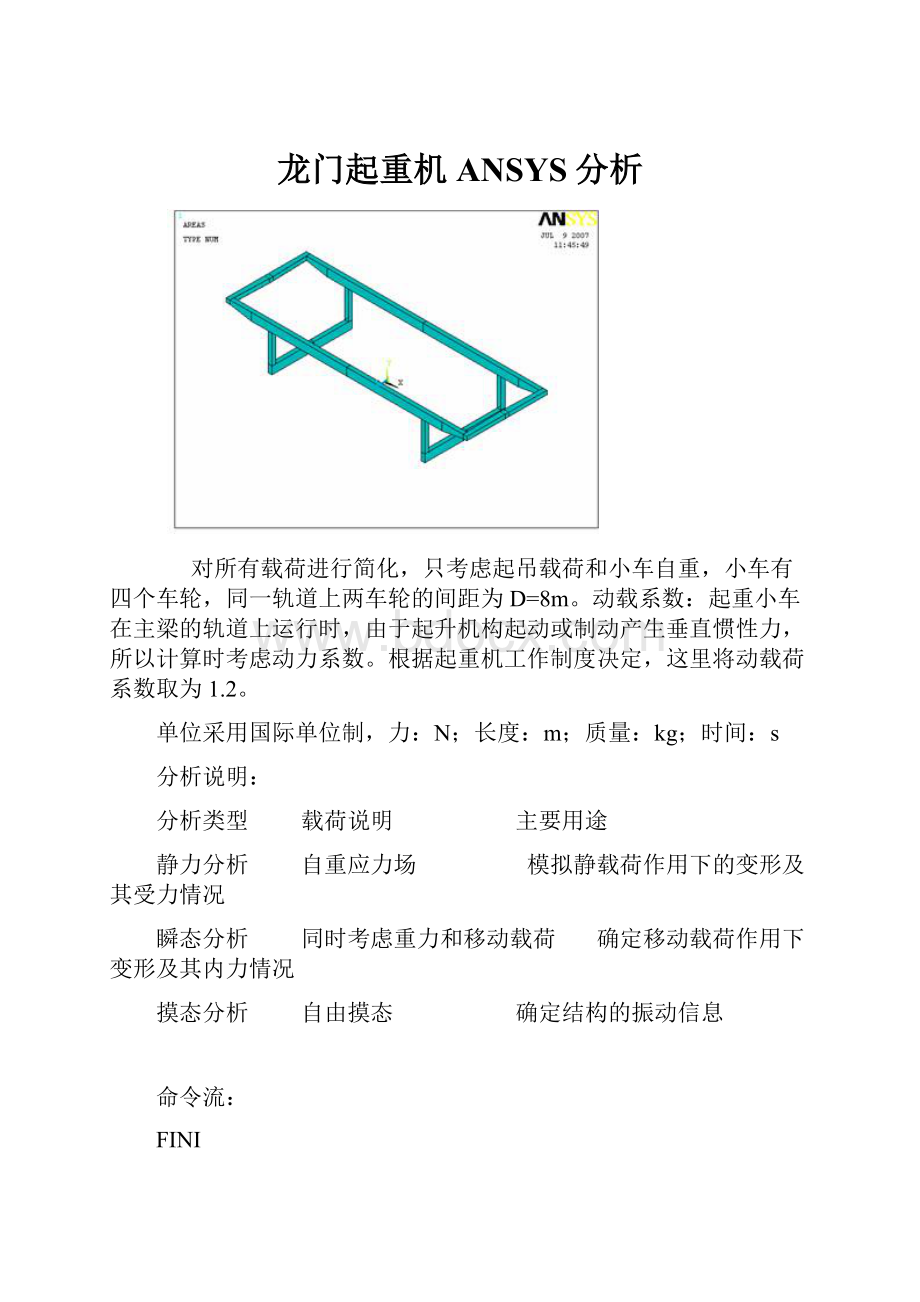
龙门起重机ANSYS分析
对所有载荷进行简化,只考虑起吊载荷和小车自重,小车有四个车轮,同一轨道上两车轮的间距为D=8m。
动载系数:
起重小车在主梁的轨道上运行时,由于起升机构起动或制动产生垂直惯性力,所以计算时考虑动力系数。
根据起重机工作制度决定,这里将动载荷系数取为1.2。
单位采用国际单位制,力:
N;长度:
m;质量:
kg;时间:
s
分析说明:
分析类型 载荷说明 主要用途
静力分析 自重应力场 模拟静载荷作用下的变形及其受力情况
瞬态分析 同时考虑重力和移动载荷 确定移动载荷作用下变形及其内力情况
摸态分析 自由摸态 确定结构的振动信息
命令流:
FINI
/CLE
/FILNAME,EX
/TITLE,THEANALYSISOFTHE LMD
!
*******************************参数区************************************
!
整体尺寸(到中轴线)
*SET,B,40 !
宽度
*SET,H,15 !
高度
*SET,L,120 !
跨度
!
*************************************局部尺寸****************************
!
伸臂部分
*SET,L_S,20 !
伸臂长度
*SET,L_S_1,10 !
伸臂等截面段长
*SET,H_S_1,4 !
伸臂等截面段高
*SET,B_S_1,2 !
伸臂等截面段宽
*SET,L_S_2,10 !
伸臂变截面段长
*SET,H_S_2,2 !
伸臂变截面段高
*SET,B_S_2,2 !
伸臂变截面段宽
!
横梁
*SET,L_H,40
*SET,B_H,2
*SET,H_H,2
!
跨中部分
*SET,L_KZ,80 !
跨中长度
*SET,H_KZ,4 !
跨中高度
*SET,B_KZ,2 !
跨中宽度
!
支撑部分
*SET,L_ZC,15 !
支撑长度
*SET,HS_ZC,4 !
支撑高度上截面高
*SET,B_ZC,2 !
支撑宽度
!
框架脚
*SET,L_KJ,40 !
框架脚长度
*SET,H_KJ,4 !
框架脚高度
*SET,B_KJ,2 !
框架脚宽度
*SET,T,0.5 !
箱形板厚度均为0.5
/PREP7
ET,1,63
MP,EX,1,2.1E10
MP,PRXY,1,0.3
MP,DENS,1,7850
R,1,T,T,T,T
!
***********************载荷************************
F=0.25*(45E4*1.02+60E4*1.2)
!
建立四分之一模型
!
生成跨中关键点
K,1,0,H+H_KZ/2,-B/2+B_KZ/2
K,2,0,H+H_KZ/2,-B/2-B_KZ/2
K,3,0,H-H_KZ/2,-B/2-B_KZ/2
K,4,0,H-H_KZ/2,-B/2+B_KZ/2
KGEN,2,1,4,1,L_KZ/2,,,100 !
跨中部分
KGEN,2,103,104,1,-B_ZC/2 !
定位支撑位置
KGEN,2,103,104,1,B_ZC/2
KGEN,2,1,4,1,L_KZ/2+L_S_1,,,200 !
伸臂等截面段
!
生成伸臂端面关键点
K,301,L/2+B_H/2,H+H_KZ/2,-B/2+B_KZ/2
K,302,L/2+B_H/2,H+H_KZ/2,-B/2-B_KZ/2
K,303,L/2+B_H/2,H+H_KZ/2-H_H,-B/2-B_KZ/2
K,304,L/2+B_H/2,H+H_KZ/2-H_H,-B/2+B_KZ/2
!
支撑
KGEN,2,5,8,1,,-L_ZC,
!
横梁
KGEN,2,302,303,1,B_H
KGEN,2,13,14,1,,,L_H/2+B_KZ
KGEN,2,15,16,1,-B_H
!
框架脚
KGEN,2,9,11,2,,-H_KJ
KGEN,2,19,20,1,,,L_H/2+B_KZ
KGEN,2,21,22,1,,H_KJ
A,1,2,302,301,1
A,2,202,203,3,2
A,202,302,303,203,202
A,201,301,304,204,201
A,201,204,4,1,201
A,6,10,12,8,6
A,8,12,11,7,8
A,7,11,9,5,7
A,6,10,9,5,6
A,3,4,6,5,3
A,203,204,304,303,203
A,302,303,14,13,302
A,201,204,304,301,201
A,13,15,16,14,13
A,302,17,15,13,302
A,301,17,18,304,301
A,303,18,16,14,303
A,9,19,20,11,9
A,11,24,22,20,11
A,20,22,21,19,20
A,21,19,9,23,21
A,10,23,24,12,10
ARSYM,X,ALL
ARSYM,Z,ALL
ALLSEL
NUMMRG,KP
ESIZE,1
AMESH,ALL
ALLSEL
NUMMRG,ALL
SAVE,LMD,DB,,ALL !
保存为LMD.DB
ASEL,S,AREA,,1,5,4
ASEL,A,AREA,,22,26,4
ASEL,A,AREA,,43,47,4
ASEL,A,AREA,,64,68,4
ASEL,A,AREA,,30,72,42
ASEL,A,AREA,,41,83,42
ASEL,A,AREA,,20,62,42
ASEL,A,AREA,,9,51,42
ASEL,A,AREA,,36,78,42
ASEL,A,AREA,,15,57,42
ASEL,A,AREA,,75,80,5
ASEL,A,AREA,,54,59,5
ASEL,A,AREA,,12,17,5
ASEL,A,AREA,,33,38,5
ASEL,A,AREA,,53,58,5
ASEL,A,AREA,,11,16,5
ASEL,A,AREA,,32,37,5
ASEL,A,AREA,,74,79,5
ASEL,A,AREA,,10,31,21
ASEL,A,AREA,,52,73,21
AREVERSE,ALL
SAVE,LMD1,DB,,ALL !
保存为LMD.DB
!
约束
ASEL,S,,,40,82,42
ASEL,A,,,19,61,42
NSLA,S,1
D,ALL,ALL
ALLS
!
************************静力求解***********************
/SOLU
ANTYPE,STATIC !
指定为静力分析
ACEL,0,9.8 !
施加重力加速度
SOLVE
/POST1
PLDISP,0 !
变形图
PLNSOL,U,Y,0,1 !
Y向位移云图
ETABLE,,S,EQV !
定义单元表
PLETAB,SEQV,NOAV !
绘等效应力云图
ETABLE,MX,SMISC,4
PLETAB,MX,NOAV
ETABLE,MY,SMISC,5
PLETAB,MY,NOAV
!
**************************!
同时考虑重力和移动荷载****************************
/SOLU !
进入求解器
ANTYPE,TRANS !
定义瞬态求解
TRNOPT,FULL !
指定为完全瞬态分析
TIMINT,OFF !
关闭时间积分开关
NLGEOM,OFF !
关闭大变形开关
TIME,1E-8 !
设置一个十分小的时间步
NSUBST,2 !
设两个子步
KBC,1 !
设置为加载方式为阶跃式
ACEL,0,9.8 !
施加重力加速度
SOLVE !
求解
TIMINT,ON !
打开时间积分开关
TIM=0 !
初始化
DELT=1 !
时间增量
*DO,I,1,114,1.000 !
进入循环
TIM=TIM+1 !
循环控制
TIME,TIM !
循环控制
FDELE,ALL,ALL !
删除所有载荷
ALLSEL !
选择所有元素
NSEL,S,LOC,X,-61+(I-1) !
由位置选择点
NSEL,R,LOC,Y,17 !
由位置重选点
NSEL,R,LOC,Z,-20 !
由位置重选点
F,ALL,FY,-F !
加集中载荷
ALLSEL !
选择所有元素
NSEL,S,LOC,X,-53+(I-1) !
由位置选择点
NSEL,R,LOC,Y,17 !
由位置重选点
NSEL,R,LOC,Z,-20 !
由位置重选点
F,ALL,FY,-F !
加集中载荷
ALLSEL !
选择所有元素
NSEL,S,LOC,X,-61+(I-1) !
由位置选择点
NSEL,R,LOC,Y,17 !
由位置重选点
NSEL,R,LOC,Z,20 !
由位置重选点
F,ALL,FY,-F !
加集中载荷
ALLSEL !
选择所有元素
NSEL,S,LOC,X,-53+(I-1) !
由位置重选点
NSEL,R,LOC,Y,17 !
由位置重选点
NSEL,R,LOC,Z,20 !
由位置重选点
F,ALL,FY,-F !
加集中载荷
ALLSEL !
选择所有元素
NSUBST,1 !
设置子步数
OUTRES,ALL,ALL !
输出所有结果
SOLVE !
求解
*ENDDO !
循环结束
!
后处理
/POST26 !
进入后处理模块
/AXLAB,Y,UY !
制定Y轴名称
NSOL,2,22,U,Y,UY_2 !
选择2号节点的Y向变形作为变量2
PLVAR,2 !
显示时程关系曲线
/AXLAB,Y,UX !
制定Y轴名称
NSOL,3,2,U,X,UX_2 !
选择2号节点的X向变形作为变量3
PLVAR,3 !
显示时程关系曲线
/AXLAB,Y,UZ !
制定Y轴名称
NSOL,4,2,U,Z,UZ_2 !
选择2号节点的Z向变形作为变量4
PLVAR,4 !
显示时程关系曲线
/AXLAB,Y,UY !
制定Y轴名称
NSOL,5,1628,U,Y,UY_1628 !
选择1628号节点的Y向变形作为变量5
PLVAR,5 !
显示时程关系曲线
/AXLAB,Y,UX !
制定Y轴名称
NSOL,6,1628,U,X,UX_1628 !
选择1628号节点的X向变形作为变量6
PLVAR,6 !
显示时程关系曲线
/AXLAB,Y,UZ !
制定Y轴名称
NSOL,7,1628,U,Z,UZ_1628 !
选择1628号节点的X向变形作为变量6
PLVAR,7 !
显示时程关系曲线
!
特殊位置处的变形和应力云图
set,1
PLDISP,0 !
显示变形云图
PLNSOL,U,X,0,1 !
小车在悬臂端时X向位移云图
PLNSOL,U,Y,0,1 !
小车在悬臂端时Y向位移云图
PLNSOL,U,Z,0,1 !
小车在悬臂端时Z向位移云图
ETABLE,,S,EQV !
定义单元表
PLETAB,SEQV,NOAV !
绘等效应力云图
!
小车在跨中附近
set,57
PLDISP,0 !
显示变形云图
PLNSOL,U,X,0,1 !
小车在跨中时X向位移云图
PLNSOL,U,Y,0,1 !
小车在跨中时Y向位移云图
PLNSOL,U,Z,0,1 !
小车在跨中时Z向位移云图
ETABLE,,S,EQV !
定义单元表
PLETAB,SEQV,NOAV !
绘等效应力云图
!
*****************************模态分析************************************
/SOLU !
进入求解器
ANTYPE,MODAL !
指定为模态分析
MODOPT,LANB,20,0,0,,OFF !
选择模态分析方法
MXPAND,20,,,YES !
扩展振形
OUTPR,BASIC,ALL !
控制求解屏幕输出
OUTRES,ALL,ALL !
输出所有项,每一步都输出
ALLSEL !
选择所有元素
SOLVE !
求解
!
********************************模态分析后处理************************************
/POST1
SET,LIST !
结果列表
SET,1,1 !
读入第一个载荷子步的结果
PLDISP,0 !
显示一阶振型
SET,1,2 !
读入第二个载荷子步的结果
PLDISP,0 !
显示二阶振型
SET,1,3 !
读入第三个载荷子步的结果
PLDISP,0 !
显示三阶振型
SET,1,4 !
读入第四个载荷子步的结果
PLDISP,0 !
显示四阶振型


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 龙门 起重机 ANSYS 分析
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《公务员财产申报制度》.docx
《公务员财产申报制度》.docx
-
《儿童口腔病学》汇总题库集.docx
-
《建筑施工组织与管理》教案教学内容.docx
-
《班委选举细则》.docx
-
《光伏组件监造技术标准》.docx
-
《年终表彰大会讲话稿 表彰大会致辞稿》.docx
-
《听颖师弹琴》《李凭箜篌引》分别鉴赏及对比鉴赏加练习人教版高一选修.docx
-
《鹬》分镜头脚本.docx
-
5套打包宜昌市小学四年级语文上期中考试单元测试题及答案.docx
-
16开纸田字格word字帖模板.docx
-
315食品安全活动策划书.docx
-
CFG桩基础施工方案详解.docx
-
08人机工程学中英文资料外文翻译文献.docx
-
《读古典名著口百味人生》获奖精品省优获奖教案 部编版语文精品.docx
-
《功课很重要》教案1学习资料.docx
-
《冷拼工艺》教案.docx
-
《唐人街探案3》电影观后感《唐人街探案3》心得作文5篇.docx
-
《C语言程序设计》习题.docx
-
《幼儿园课程游戏化的实践研究》.docx
-
4现场管理档案.docx
-
13级西医专业基础综合测评答.docx
-
100部校园电影全.docx
-
CAD制图标准.docx
-
《分数除法一.docx
-
edb72192ac02de80d4d8d15abe23482fb5da0291.docx
-
H236车联网资料路尚行业版OMP操作手册服务商0618.docx
-
jarlasscon门机.docx
-
《百分百责任学习心得》.docx
-
《管理学基础》习题18章单凤儒.docx
-
《旅游专业日语》课程实施方案.docx
-
《铁路旅客运输服务》学习指导书.docx
-
《预算会计》课程标准.docx
-
大学生户外旅行社项目商业计划书.docx
-
大学C++面向对象程序设计试题及答案.docx
-
房地产基本制度与政策房地产开发经营管理制度与政策考试试题.docx
-
稻草人练习及答案.docx
-
部编本初中语文七年级总复习字词考前必学.docx
-
电商平台B2B企业对企业服务模式创业计划书策划案.docx
-
带你走看欧洲的零售业.docx
-
电大现代管理原理期末考试复习题及答案.docx
-
餐饮合作经营协议书.docx
-
二年级语文下册《台湾的蝴蝶谷》教学设计4 苏教版.docx
-
地理第二章区域可持续发展第一节荒漠化的危害与治理以我国西北地区为例1同步备课教学案湘教版必修3.docx
-
多基因病.docx
-
房地产可行性研究报告二.docx
-
超大型管幕箱涵顶进施工工法.docx
-
电机项目可行性研究报告.docx
-
范文XX三年级上册数学第二单元备课教案.docx
-
醇酸树脂漆类项目立项申请报告.docx
-
服装策划方案.docx
-
分析天平项目立项报告案例.docx
