 交通流理论第六章.docx
交通流理论第六章.docx
- 文档编号:23995164
- 上传时间:2023-05-23
- 格式:DOCX
- 页数:33
- 大小:753.30KB
交通流理论第六章.docx
《交通流理论第六章.docx》由会员分享,可在线阅读,更多相关《交通流理论第六章.docx(33页珍藏版)》请在冰豆网上搜索。
交通流理论第六章
第六章宏观交通流模型
在城市快速发展而使交通变得拥挤的时候,城区的可达性便成为评价城市生活质量的重要方面,而交通拥挤确实已经成为当今各大城市的难题。
为解决这一问题,人们采用了各种工程和技术手段,小到路口渠化、信号配时,大到道路网规划、智能运输系统,应该说各项技术均已经达到了有效、适用的地步。
最近30年来,人们对应用这些技术形成的交
通设施的效果进行了很多研究,并形成了对各单项设施评价的理论和方法,如干道通行能力和效果的评价,交叉口控制效果的评价等。
但是如何对一个道路网络的交通效果进行评价更是人们所关心的问题,尤其是ITS快速发展的今天,有一个基于路网的交通流优化和
评价模型体系,就显得更为重要了。
本章从宏观的角度介绍一些流量、速度和密集度的量测和推算方法,从而提供网络交通效果评价的基本理论和基本方法。
这些方法可用于:
1)同一城市不同时期的交通效果对
比分析;2)不同城市同一时期的交通效果对比分析;3)路网交通设施设计评价。
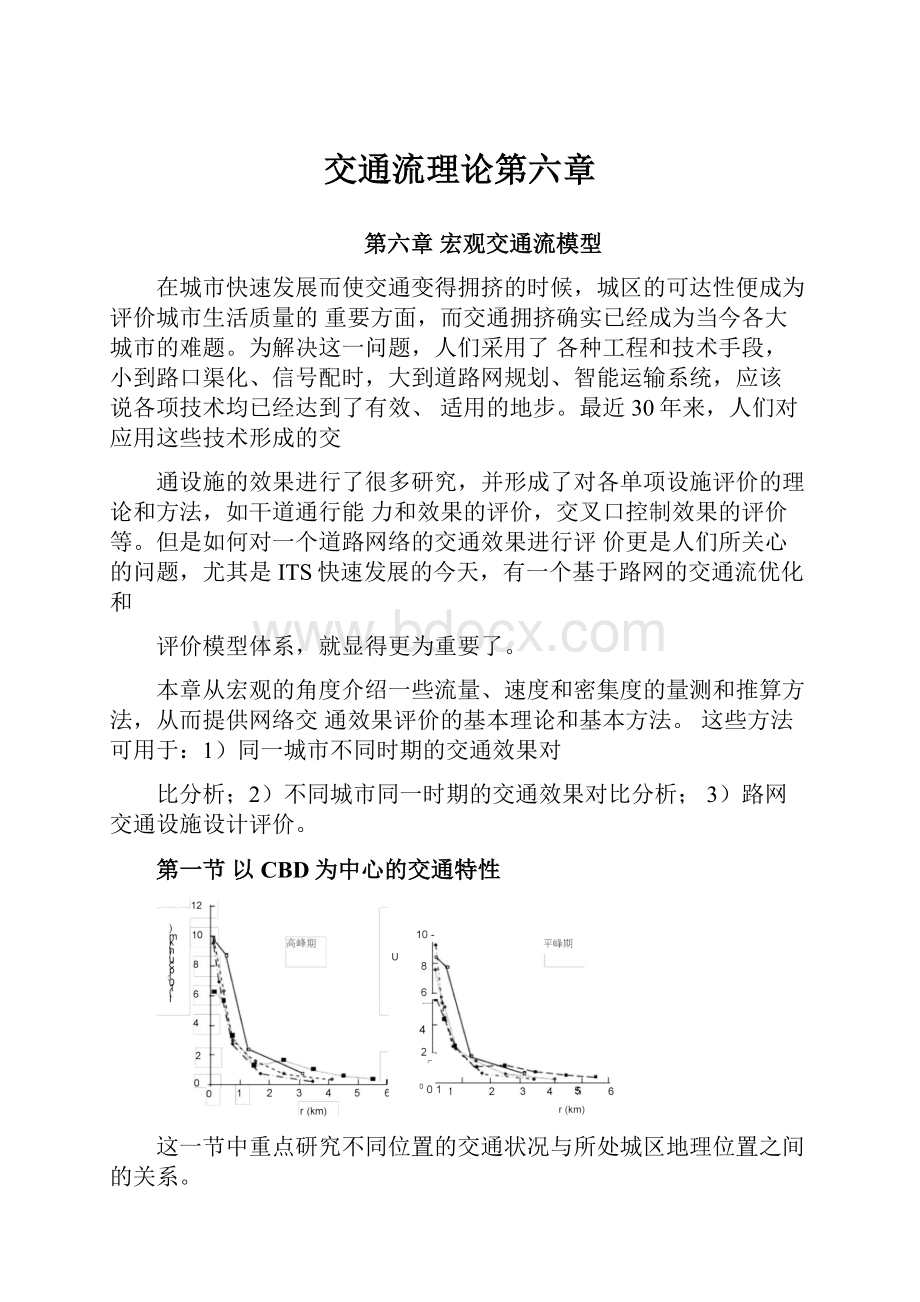
第一节以CBD为中心的交通特性
这一节中重点研究不同位置的交通状况与所处城区地理位置之间的关系。
图6—1交通强度与距市中心距离的关系
一、交通强度
交通强度是指单位面积上单位时间内通过的所有车辆(折合成标准车辆)的行驶距离
总和。
一般认为CBD(thecentralbusinessdistrict,商业中心区)是一个城市交通最为敏感的地区,交通强度与距CBD的距离有关。
于是,研究者建立了多种以距CBD的距离为自
变量的评价交通特性的模型。
图6-1是对英国4个城市的研究结果,图中交通强度的单位
是103pcu/h/km。
图形符合指数模型,其模型如下:
I二Aexo:
i-:
:
;r/a(6—1)
式中:
A、a待定参数;
I交通强度(pcu/h/km);
r距CBD的距离(km)。
式中的参数A、a在高峰时段和非高峰时段的标定值是不同的。
此式表明,离CBD越
远,交通强度就越小。
、平均速度
通过对英国6个城市的研究发现,车辆运行的平均速度与距离CBD的距离有关。
以
市中心的放射线道路为研究对象,将道路按照一定的距离分割成若干段然后进行观测,并以观测数据建立模型,共建立了如下5种不同的模型:
u=arb(6—2)
u=carb(6—3)
u=abr(6—4)
u=a-be(6—5)
1+b2r2
u「(6—6)
a+cbr
上述各式中a,b,c为待定参数,u是速度,r的意义同上。
在上述模型中,线性模型(6—4)在应用中出现了较高的估计值,即随着r值的增加,
预测的速度增加过快,因此此式被淘汰。
修正的幕函数(6—3),在应用中常常估计出负的速度值,因此也被淘汰,其余三个模型均可使用。
图6—2显示的是对Nottingham的数据
分别用式(6—2)、式(6—5)、式(6—6)的拟合情况。
图中,横坐标表示距中心区的距离(km),纵坐标表示行程速度(km/h)。
图6—3显示的是用Nottingham的多组数据用式(6—2)进行拟合的情况。
值得注意的是:
当r=0时,用式(6—2)将得出u=0的结论,这是不合理的。
因此,只有r大于
一定值时才能使用本式。
第二节一般网络模型
本节结合实例介绍如何在网络范围内研究速度、流量和密度等交通流参数。
一、网络通行能力
20世纪60年代,有人提出考察城市中心区交通能力的方法,定义N为单位时间内进
入中心区的车辆数。
一般来说,N取决于路网形态,包括道路宽度、交叉口控制类型、交
通分布和车辆类型等。
设城区面积为A,道路占地比例为f,交通能力为C(单位时间单位
道路宽度通过的车辆数),建立模型如下:
N=:
fCiA(6—7)
这里〉为常数。
一般把f与(N/CiA)的关系按3种路网类型划分,如图6—4。
图6—4城市道路系统理论交通能力
图6-4中,曲线1代表包含环路的路网,曲线2代表放射线路网,曲线3代表放射
弧线路网(2和3为一类),曲线4代表不包含环路的路网。
1964年有人运用沃德洛尔
(Wardrop)速度一流量模型在伦敦对C值进行了估计。
沃德洛尔模型如下:
3
q=2440-0.220u(6-8)
式中:
u速度(km/h)
q平均流量(pcu/h)
用式(6—8)除以道路宽度(本例为12.6m),并将道路宽度折算成英尺,则得到:
C=58.2—0.00524U3(6—9)
这里要注意,当使用不同的流量一速度模型时,得到的C值的估计模型也不同,所以,
前者的选择非常重要。
图6—5是运用式(6—9)对三种不同道路绘制的曲线。
通过多个城市的数据可以标定a值(或得到经验值),从而得到网络交通能力的测算
模型。
以伦敦为例,20世纪60年代初的测算模型为:
N=33-0.003u3f、、A(6—10)
其中u的单位为mile/h,A的单位为平方英尺。
60年代末,又提出了新的模型:
N=(33-0.003u3JfVA(6—11)
式中加进的调整项J表示直接用于交通的有效道路(道路占地中直接用于交通流运动的道路)的比重,在当时的英国,J值在0.22到0.46之间。
在上例分析中不难看出,流量和速度的关系模型是我们建立网络交通能力模型的关
键,因此,有必要对这一部分进行专门的研究。
放射弧线放射线
估计曲线--环线
图6—5进入CBD的车辆数与理论估计值的比较
二、速度和流量的关系
20世纪60年代中期,有人用伦敦中心区的数据建立了一个流量一速度的线性模型。
数据每2年采集一次,共持续了14年,数据的采集考虑了网络范围的平均速度和平均流量。
平均速度是车辆反复通过中心区预定路线的速度平均值,平均流量为标准车辆(经过换算)
通过不同长度道路的流量的加权平均值。
数据的采集侧重于高峰期和平峰期的对比。
从图6—6中可以看出,所有两点连线的斜率都为负值,说明流量的增加导致了速度下降。
同时也可以看到,各年的曲线有向右移动的趋势,说明网络交通能力逐年提高,究其原因,应归咎于交通管理水平的提高和车辆性能的改进。
两点确定的连线不足以说明流量与速度的关系。
现在把这16个点放在一起进行观察,
就可以得出一个线性关系,如图6—7所示。
图中,在考虑了数据采集期间路网通行能力的
变化后,按可比性对数据进行了调整(针对基年)。
通过这组数据并采用线性回归技术获得的模型如下:
u=30.2-0.0086q(6—12)
式中:
u平均速度(miles/h);
q平均流量(pcu/h)。
注:
以1964年为基年
(
图6—7速度和流量回归曲线(1952〜1966)
按照式(6—12)计算,自由流速度(回归曲线在速度坐标的截距)应为48.3km/h,
但是,回归所使用的数据都不小于2200pcu/h,因此对自由流速度还需进一步研究。
研究
人员采集了星期天的低流量数据(同一年的),所绘制的曲线与式(6—12)所绘制的曲线
对比情况如图6—8所示,从图上不难看出自由流速度。
实际上,速度与流量的关系与所处的地理位置关系很大,在市中心交叉口多的地方和在郊区交叉口较少的地方获得的研究成果差别很大,下面就给出两个这种例子。
图6—9绘制了伦敦市内区和外区的速度一流量关系图。
内区信号控制交叉口的密度
为每英里7.5个,外区信号控制交叉口的密度为每英里2.6个。
从图可以看出,这两个区
所获得的曲线差别明显,它们的回归曲线差别也很大。
u
(km/h)
内区的回归方程为:
(6—13)
u=24.3-0.0075q
外区的回归方程为:
u=34.0-0.0092q(6—14)
1968年,沃德洛尔在研究平均速度和平均流量时,直接把平均道路宽度和平均交通信
号控制间距考虑了进去。
这里的平均速度是指平均行程速度,包括车辆停车时间,而行驶速度定义为车辆行驶时间内的平均速度。
由此,有:
11一
fd(6—15)
uur
式中:
u平均速度(mile/h);
ur——为行驶速度(mile/h);
d每个交叉口的平均延误(hour);
f――每英里信号交叉口数。
我们假定:
ur=a1-q/Q(6—16)
d=b/1-q/S(6—17)
式中:
a、b参数;
Q通行能力(pcu/h);
入-
绿信比,入-
:
g/c;
g
—有效绿灯时间;
c
—信号周期时长;
S—
—饱和流率。
于是式(6—15)可以写成:
1
1fb
-+
(6—18)
u
a1-q/Q1-q/S
式(6—18)是考虑了多种因素后的速度与流量关系。
如果把道路宽度也考虑进来,则有:
(6—19)
42英尺,所以伦敦市中心
一0.70q+430
ur=31-■
3w
式中w为道路宽度(英尺)。
伦敦市中心的道路平均宽度为
ur=28-0.0056q,后根据经验调整为u「=28-0.0058q。
仍以伦敦市为例,取
Q=2610(pcu/h),fb=0.00507(估计值),则有:
11丄0.00507
——=十
u28-0.0058q〔_q
2610
化简后:
111
(6—20)
u28-0.0058q197-0.0775q
根据伦敦市的数据,对式(6—19)进一步修正为:
式(6—17)可以改写成:
其中k为常数。
对于伦敦市,w=42英尺,入=0.45,贝Uk入w=Q=2770,这样k=147,所以:
当f=5时,fb=0.00507,所以,b=0.00101,于是,式(6—23)写成:
(6—24)
fd=
1000—6.8q/hw
将式(6—21)、式(6—24)代入式(6—15),则有:
(6—25)
11丄f
1400.0244q“cc6.8q
311000--
ww扎w
这是以伦敦市为例研究的速度与流量关系模型。
上述过程仅仅提供了研究方法和思路,对于一个具体的城市来说,可按照此思路和方法进行研究,但决不能直接使用这些模型。
很显然,q/w就是交通强度,因此从式(6—25)及其推导过程我们可以得出结论:
平均速度受交通强度、信号控制交叉口的密度、绿信比和道路宽度的影响,图6—10、图6
—11和图6—12直观地显示了这一结论。
图6—10道路宽度与平均行程速度关系
f=5,入=0.45
q/w(pcu/h/m)
图6—12绿信比与行程速度的关系
w=12m,f=5
三、网络模型与网络参数
在使用模型定量评价路网服务质量时,必须定义一些参数。
这里,有两个主要模型要讨论,一个是:
关系模型,另一个是城市交通的二流理论模型,二流理论模型将在下一节详述。
20世纪70年代初,有关人员选择下面几个变量进行了研究,并建立了模型:
I――交通强度,单位时间内单位面积上所有车辆运行距离的总和;
R――道路密度,单位面积上道路长度或面积;
u――加权区间平均速度。
m
I=HU/R(6—26)
式中〉,m为参数。
式(6—26)是通过英国和美国的多个城市观测数据建立起来的,这里,〉、m的标定非常关键。
6个城市的数据标定结果是m值接近于-1,见图6—13。
因
此,上式可以写成:
I=aR/u(6—27)
在不同的城市不同的地区获得的值是不同的。
研究发现,对一个城市或一个地区,诸如道路宽度、交叉口密度等路网特征对〉值的影响很大。
这样,:
•值就可以作为度量路网
特征和交通行为关系的特征值,进一步说它是路网服务水平的指示器。
图6—14中的〉线
代表了伦敦市不同位置的路网服务水平,这些线条类似于等高线,相同「值的线具有相同
的服务水平,图中的暗线是市区的划分线。
道路服务水平随[值增加而提高。
4
2
O
O
2
oooO
0864
O
2
4681020406080100
u/R
图6—13干道路网〉关系
1.1
0.9
图6—14伦敦市的〉图
第三节二流理论
、基本理论
交通流中的车辆可以分成两类,也就是二流,一类是运动车辆,一类是停止车辆。
停止车辆是指在交通流中停顿下来的车辆,停车的原因包括信号、标志、临时装货卸货、临时上下客、拥挤等,但不包括车流以外的停车,如停车场的停车、路旁停车位的长时间停车等。
将交通流划分成二流的目的就是要定量描述路网的服务水平。
二流模型基于以下两条假设:
(1)车辆在路网中的平均行驶速度与运行车辆所占的比重成比例;
(2)路网中循环试验车辆(即交通观测车)的停车时间比例与路网中同期运行车辆的停车时间比例相等。
第一个假设关系到行驶车辆的平均行驶速度Ur和行驶车辆比重fr,并有:
Ur二Umfrn(6—28)
这里Um为最大平均行驶速度,n是表示道路交通服务质量的参数。
下面就这两个参数进行讨论。
定义平均行程速度Ut=Urfr,则有:
因为fr+fs=1,这里fs为停止车辆比例,式(6—29)可以写成:
Ut=Um(1—fs)(6—30)
边界条件为:
fs=0时,Ut=Um;fs=1时,Ut=0。
上述关系也可以表述成平均行程时间的关系。
用Tt表示平均行程时间,Tr表示平均行
驶时间,Ts表示停止时间。
对于单位距离来说,Tt=1/Ut,Tr=1/Ur,Tm=1/Um,这里,Tm
为平均最短行驶时间,代入以上各式即可。
二流理论的第二条假设把试验车在路网中的停车时间与全部车辆的停车时间联系在
一起,根据前述可以得出:
f丄
St
(6—31)
由式(6—30)可得:
Tt二Tm1—fs4n1)
(6—32)
与式(6—31)结合:
Tt二Tm1-Ts/Tt
(6—33)
由于Tt=Tr+Ts,解得:
1
1n
Tr=Tmn1Tt-1
(6—34)
相应地有:
1
n
Ts二Tt-Tmn1T而
(6—35)
很多实际研究结果证实了二流模型,
表明用参数n和Tm能够很好地反映城市路网的
交通状况。
为了便于模型标定,对式(
6—34)两边同时取自然对数,得到:
(6—36)
、二流模型参数
1.参数的意义
参数Tm是单位距离上平均最短行驶时间,其含义是车辆在路网上没有任何停顿且行驶
通畅时所耗时间,理想的条件是路上只有一辆车。
这样理想的参数很难直接测得,因为即便是只有一辆车行驶,在城市道路上也难免遇到信号灯的制约。
因此,一般情况下,Tm是
指在低流量下测得的最小平均行驶时间。
Tm值若大,则说明路网条件差;反之,则说明路
网条件好。
单位距离平均停止时间Ts随着n值增加而增加,同时,总的平均行程时间也增加。
因为Tt=Tr+Ts,所以总的行程时间Tt至少与停止时间Ts以同样的速度增长。
从式(6—34)可知,如果n=0,Tr等于常数,总行程时间与停止时间等速增长。
如果n>0,总行程时
间增长速度大于停止时间的增长速度。
从直观上看,n值一定大于0,因为停止时间的增加
是拥挤所至,而拥挤的交通必然导致车速减缓,这必然导致总的行驶时间增加更多。
实际研究表明,n值在0.8~3.0之间变化。
从上面分析可以得出结论:
n值的大小,代表了路网
环境变化的快慢。
如果n值较大,随着交通需求的增加,路网环境变差的速度也就较快。
正因为二流模型参数反映了路网对交通需求的敏感性,所以常被用来评价各种交通需求状态下的路网状况。
图6—16Tt与Ts关系实例(1984年)
图6—16是几个城市1984年实地研究结果。
Houston:
Tm=2.70min/mile,n=0.80;
Austin:
Tm=1.78min/mile,n=1.65。
前一个城市当Ts较小时Tt较大,但随着Ts的增加,Tt的增加相对较慢(因为n值较小);相反,后一个城市则当Ts较小时Tt较小,但随着Ts的增加,Tt的增加相对较快(因为n值较大)。
这个实例说明了上述结论。
2.驾驶员行为的影响
估计二流模型参数的数据是通过跟车试验获得的,这种试验让跟驰车辆的驾驶员随机地跟随一辆车,直到被跟车辆停车或离开预设的路网,然后,就近再选择一辆车跟随。
跟驰车辆驾驶员在跟驰过程中要尽可能地模仿其他驾驶员的行为,以便真实地反映其他驾驶员所花的停车时间。
选择的路网也是常用道路,这样可以使样本更具真实性。
跟驰车辆的行驶路程以1英里为单位分割,记载(或计算)每个单位的Tr和Tt值,这些(Tr,Tt)观
测值用于参数估计。
跟车试验最为重要的一点是驾驶员的行为,包括跟驰车辆驾驶员和被跟车辆驾驶员。
在同一路网中,对于跟驰车辆,分别利用鲁莽驾驶员和保守驾驶员所获得的数据绘制出的二流曲线如图6—17所示,可见这些曲线明显不同。
图6—17是取自两个城市的研究结果。
两个图中,正常曲线建立在标准跟驰实验基础
之上,另两条曲线则建立在鲁莽跟驰和保守跟驰实验基础之上。
同一个图的试验条件相同,
即相同的时间和相同的路网,但三条曲线却明显不同。
可见,驾驶员的行为对二流模型参数有很大的影响。
图6—17不同驾驶员获得数据描绘的二流曲线(1988年)
3.路网形态的影响
路网的地理形态和交通控制状况对路网的交通服务水平有相当重要的影响。
如果能够建立这些因素与二流模型参数之间的定量关系,便可从中体会出改进交通流的办法,并能提供比较不同改进措施的定量手段。
20世纪80年代后期以来,研究人员在这方面做了许多工作。
有人选择下列数据进行了研究:
1)每平方英里的车道长度(Ci);2)每平方英里的交叉口数(C2);3)单向交通街道的比例(C3);4)平均信号周期长度(C4);5)平均街区长度(C5);6)平均每条街道的车道数(C6);7)街区的平均长宽比(C7)。
通过4个城市的数据并进行实地研究,有3个变量被确定有用,并选择模型如下:
Tm=3.59-0.54C6(6—37)
n--0.212.97C30.22C7(6—38)
有人对更多的因素进行了研究,选择的因素包括:
1)平均街区长度(Xi);2)单向交
通街道比例(X2);3)平均每条街道的车道数(X3);4)交叉口密度(X4);5)信号控制
交叉口密度(X5);6)速度限制(X6);7)平均信号周期长度(X7);8)允许路边停车的道路长度比例(X8);9)感应式信号交叉口比例(X9);10)信号控制交叉口入口占全部入口的比例(X10)。
通过10个城市的实地研究,确定7个变量有用,并建立了如下模型:
Tm=3.930.0035X5-0.047X6-0.433X10(6—39)
n-1.731.124X2-0.180X3-0.0042X5-0.271X9(6—40)
在上述两组研究中,相关系数r差别较大,式(6—37)和式(6—38)都接近于1,
而式(6—39)和式(6—40)分别为0.85和0.87,这说明变量选择和数据选择的重要性。
这些模型只能为我们提供一个研究思路,不能直接套用。
对上述研究可以得出一个结论:
用多元线性回归方法可以建立路网形态与二流模型参数之间的关系模型,但变量的选择和数据的获得比较困难。
目前,对二流模型参数的标定普遍采用计算机模拟的方法,有很多软件都可用于此目的。
计算机模拟的优点是可以变换路网形态,利用设想的路网形态,改变控制方案等等,且成本低廉。
存在的问题是模拟软件本身需要不断地改进,使其更能反映不同条件下的真实交通状况。
事实上,交通流理论的研究成果与交通仿真软件有互动效应,即交通流理论的研究成果改善了仿真软件,而交通仿真软件又有助于交通流理论的进一步研究。
第四节二流模型与网络交通模型
计算机模拟技术的发展为我们宏观上(路网范围内的全部车辆)研究平均速度(U)、
平均流量(Q)和平均密度(K)之间的关系提供了条件,以往这种研究需要进行同时间的全部路网的交通观测,这种观测很难实现,而计算机仿真技术可以通过模拟的方法来实现这种数据采集。
本节介绍运用计算机模拟技术建立的3个模型体系,这些模型的假设前提
是Q=KU,并承认二流模型。
模型体系的基本模型如下:
U=f(K)(6—41)
Q=gK(6—62)
fs=h(K)(6—43)
式中U、Q、K、fs含义同前,f、g、h表示函数关系。
、模型体系1
因为fs>0,所以对式(
式中:
fs,min
最小停车比例;
Kj――阻塞密度;n――反映路网服务质量的参数。
将式(6—44)代入式(6—30)可得:
U=Um(1-fs,minFl-(K/KjF广(6—45)
由于Q=KU,所以:
Q=KUm(l-fs,min/-(K/Kj『广(6—46)
式(6—44)、式(6—45)和式(6—46)是模型体系1的模型,符合模拟数据,如图6—18所示。
图中的模型1和模型2是根据密度的不同而采用了不同的模型。
二、模型体系2
根据格林希尔治模型:
U=Uf(1-K/Kj)(6—47)
式中Uf为自由流速度(UfWUm),将式(6—30)代入可得:
fs=1-(Uf/UmH-K/Kj沪宀(6—48)
由于Q=KU,所以:
Q二UfK-K2/Kj(6—49)
式(6—47)、式(6—48)和式(6—49)是模型体系2的模型,通过模拟技术拟合如图6—19。
三、模型体系3
模型体系3用非线性的钟型线建立U—K模型,模型如下:
U二UfexpL:
K/Kmd1(6—50)
式中Km为最大流量时的密度,:
-和d为参数。
根据式(6—30)得到:
fs=1-「Uf/UmexpL:
K/Kmd『"n1)(6—51)
又Q=KU,所以:
Q=KUfexpLa(K/KmV(6—52)
式(6—50)、式(6—51)和式(6—52)为模型体系3的模型,计算机模拟拟合情况如图6—20所示。
上述三个模型体系都可以用于进行网络交通状况的研究,可以根据实际情况进行选择。
根据上述研究结论和过程,可以得出如下结论:
第一,以网络为基础的宏观交通流特性变量之间的定量关系可以建立,并且它们之间的关系特别类似于微观研究所得的模型;第二,二流模型在理论假设和函数转换中起到了重要的作用,进一步证明了二流模型的合理性。
Q
(veh/lane/h)
fs
K(veh/lane/km)
U
(km/h)
010203040506070


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 通流 理论 第六
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《酒店人力资源管理》教案.docx
《酒店人力资源管理》教案.docx
-
《马克思主义基本原理概论》选择题复习题.docx
-
《全国100所名校示范卷》高三生物人教版西部卷一轮复习 第十五单元 《稳态与环境》综合检测.docx
-
《1吨有多重》教学设计反思及评点2篇.docx
-
《红飘带狮王》读书笔记.docx
-
《教综》真题答案.docx
-
《企业管理》复习题发学生.docx
-
《提高数学学困生的学习兴趣研究》课题工作总结报告.docx
-
《蟋蟀的住宅》的教学设计.docx
-
《园林建筑设计》教案.docx
-
《中西医结合内科学》精华笔记.docx
-
2三轴向加速度传感器长春汽车工业高等专科学校.docx
-
04装修工程施工合同.docx
-
5套打包四年级数学上期中考试单元综合练习题含答案解析.docx
-
《食品安全法》知识竞赛题目及答案.docx
-
《24式简化太极拳》简案.docx
-
《金融理论与实务》复习大纲.docx
-
《旅游地理》学案.docx
-
《企业集团财务管理》综合练习题参考答案11春.docx
-
《实践论》原文毛泽东.docx
-
《项目管理软件》课程复习题.docx
-
《员工手册》电子版范文.docx
-
《中小学布局整改措施》.docx
-
5旋风分离器安装.docx
-
10kV跨越架搭设施工方案设计.docx
-
#市关爱儿童服务中心暨救助站改造工程项目建议书.docx
-
《毛概》课程标准.docx
-
《人民日报》学习贯彻党的十七届四中全会精神系列.docx
-
《我的军训生活》作文800字.docx
-
《研发人员绩效考核奖励办法》.docx
-
1 《道路交通安全法》规定任何单位或者个人不得收缴机.docx
-
02电气检修规程.docx
-
英语特殊疑问词专题练习及答案.docx
-
优秀个人总结范文德育先进个人总结.docx
-
有关酒店营销策划方案集锦8篇.docx
-
幼儿园大班语言活动诗歌教案《风在哪里》及教学反思.docx
-
幼儿园秋季开学安全计划与幼儿园秋季开学小班保教工作计划汇编.docx
-
雨水回收利用方案.docx
-
语文人教版八年级上册短文两篇爱莲说.docx
-
预埋钢板施工设计方案完整.docx
-
员工绩效考核规定.docx
-
在县人民政府十三届一次全体扩大会议上的讲话.docx
-
长城宽带个人工作总结.docx
-
浙江省高考理综化学部分第题练习.docx
-
浙江省衢州市初中毕业升学招生考试试题科学缺答案.docx
-
新定额说明与计算规则.docx
-
新教师培训代表发言多篇.docx
-
新买了一部华为手机我怕是假的怎么判别.docx
-
新人教版一年级数学下册全册教案.docx
-
新闻信息的提取与概括资料稿子.docx
-
信息安全深入分析比较八个信息安全模型.docx
